รายวิชา: การสแกนด้วยกล้องจุลทรรศน์โพรบ กล้องจุลทรรศน์โพรบสแกน สถานะปัจจุบันและการพัฒนาของกล้องจุลทรรศน์โพรบสแกน
บทนำ
ในปัจจุบัน ทิศทางทางวิทยาศาสตร์และทางเทคนิค - นาโนเทคโนโลยี - กำลังพัฒนาอย่างรวดเร็ว ครอบคลุมการวิจัยทั้งพื้นฐานและประยุกต์ในวงกว้าง นี่เป็นเทคโนโลยีพื้นฐานใหม่ที่สามารถแก้ปัญหาในด้านต่างๆ เช่น การสื่อสาร เทคโนโลยีชีวภาพ ไมโครอิเล็กทรอนิกส์ และพลังงาน วันนี้ บริษัทอายุน้อยมากกว่าร้อยแห่งกำลังพัฒนาผลิตภัณฑ์นาโนเทคโนโลยีที่จะเข้าสู่ตลาดในอีกสองถึงสามปีข้างหน้า
นาโนเทคโนโลยีจะกลายเป็นเทคโนโลยีชั้นนำในศตวรรษที่ 21 และจะมีส่วนช่วยในการพัฒนาเศรษฐกิจและสังคมของสังคม สิ่งเหล่านี้สามารถกลายเป็นข้อกำหนดเบื้องต้นสำหรับการปฏิวัติอุตสาหกรรมครั้งใหม่ ในช่วงสองร้อยปีที่ผ่านมา ความก้าวหน้าในการปฏิวัติอุตสาหกรรมทำได้สำเร็จโดยใช้ทรัพยากรประมาณ 80% ของโลก นาโนเทคโนโลยีจะลดปริมาณการใช้ทรัพยากรลงอย่างมากและจะไม่สร้างแรงกดดันต่อสิ่งแวดล้อม แต่จะมีบทบาทสำคัญในชีวิตของมนุษยชาติ เช่น คอมพิวเตอร์ได้กลายเป็นส่วนสำคัญในชีวิตของผู้คน
ความก้าวหน้าของนาโนเทคโนโลยีถูกกระตุ้นโดยการพัฒนาวิธีการวิจัยเชิงทดลอง ซึ่งมีข้อมูลมากที่สุดคือวิธีการสแกนด้วยกล้องจุลทรรศน์โพรบ การประดิษฐ์และการกระจายที่โลกเป็นหนี้ผู้ได้รับรางวัลโนเบลปี 1986 โดยเฉพาะ - ศาสตราจารย์ไฮน์ริช โรห์เรอร์ และ ดร. . เกิร์ด บินนิก.
โลกรู้สึกทึ่งกับการค้นพบวิธีการง่ายๆ ดังกล่าวสำหรับการแสดงภาพอะตอม และแม้กระทั่งความสามารถในการจัดการกับพวกมัน กลุ่มวิจัยหลายกลุ่มเริ่มออกแบบอุปกรณ์ทำเองและทดลองในทิศทางนี้ เป็นผลให้มีรูปแบบอุปกรณ์ที่สะดวกจำนวนหนึ่งเกิดขึ้น มีการเสนอวิธีการต่างๆ สำหรับการแสดงภาพผลลัพธ์ของการโต้ตอบระหว่างโพรบกับพื้นผิว เช่น: กล้องจุลทรรศน์แรงด้านข้าง กล้องจุลทรรศน์แรงแม่เหล็ก กล้องจุลทรรศน์สำหรับบันทึกปฏิกิริยาระหว่างแม่เหล็ก ไฟฟ้าสถิต และแม่เหล็กไฟฟ้า วิธีการของกล้องจุลทรรศน์แบบออปติคัลระยะใกล้ได้รับการพัฒนาอย่างเข้มข้น มีการพัฒนาวิธีการสำหรับการดำเนินการโดยตรงและควบคุมในระบบพื้นผิวของโพรบ ตัวอย่างเช่น นาโนลิโธกราฟี - การเปลี่ยนแปลงเกิดขึ้นบนพื้นผิวภายใต้การกระทำของไฟฟ้า อิทธิพลของแม่เหล็ก การเสียรูปของพลาสติก และแสงในระบบโพรบ-พื้นผิว เทคโนโลยีถูกสร้างขึ้นสำหรับการผลิตโพรบที่มีพารามิเตอร์ทางเรขาคณิตที่ระบุ พร้อมการเคลือบพิเศษและโครงสร้างสำหรับการแสดงภาพคุณสมบัติพื้นผิวต่างๆ
การสแกนด้วยกล้องจุลทรรศน์โพรบ (SPM) เป็นหนึ่งในวิธีการที่ทันสมัยในการศึกษาลักษณะทางสัณฐานวิทยาและคุณสมบัติเฉพาะที่ของพื้นผิวแข็งที่มีความละเอียดเชิงพื้นที่สูง ในช่วง 10 ปีที่ผ่านมา กล้องจุลทรรศน์โพรบสแกนได้พัฒนาจากเทคนิคแปลกใหม่ที่เข้าถึงได้เฉพาะกลุ่มวิจัยจำนวนจำกัด ให้เป็นเครื่องมือที่ใช้กันอย่างแพร่หลายและประสบความสำเร็จในการศึกษาคุณสมบัติของพื้นผิว ปัจจุบันแทบไม่มีงานวิจัยด้านฟิสิกส์พื้นผิวและเทคโนโลยีฟิล์มบางที่เสร็จสมบูรณ์หากไม่มีวิธี SPM การพัฒนากล้องจุลทรรศน์โพรบสแกนยังเป็นพื้นฐานสำหรับการพัฒนาวิธีการใหม่ในนาโนเทคโนโลยี - เทคโนโลยีสำหรับการสร้างโครงสร้างด้วยมาตราส่วนนาโนเมตร
1. ภูมิหลังทางประวัติศาสตร์
ในการสังเกตวัตถุขนาดเล็ก Anthony van Leeuwenhoek ชาวดัตช์ได้ประดิษฐ์กล้องจุลทรรศน์ในศตวรรษที่ 17 เพื่อค้นพบโลกของจุลินทรีย์ กล้องจุลทรรศน์ของเขาไม่สมบูรณ์และให้กำลังขยาย 150 ถึง 300 เท่า แต่ผู้ติดตามของเขาได้ปรับปรุงอุปกรณ์เกี่ยวกับการมองเห็นนี้ โดยวางรากฐานสำหรับการค้นพบมากมายในด้านชีววิทยา ธรณีวิทยา และฟิสิกส์ อย่างไรก็ตาม ในช่วงปลายศตวรรษที่ 19 (1872) ช่างแว่นตาชาวเยอรมัน Ernst Karl Abbe แสดงให้เห็นว่าเนื่องจากการเลี้ยวเบนของแสงความละเอียดของกล้องจุลทรรศน์ (นั่นคือระยะห่างขั้นต่ำระหว่างวัตถุเมื่อยังไม่รวมเป็นหนึ่งเดียว ภาพ) ถูกจำกัดด้วยความยาวคลื่นของแสง (0.4 - 0.8 µm) ดังนั้นเขาจึงช่วยช่างแว่นตาที่พยายามสร้างกล้องจุลทรรศน์ขั้นสูงได้มาก แต่นักชีววิทยาและนักธรณีวิทยาผิดหวังที่หมดความหวังที่จะได้เครื่องมือที่มีกำลังขยายสูงกว่า 1500x
ประวัติความเป็นมาของการสร้างกล้องจุลทรรศน์อิเล็กตรอนเป็นตัวอย่างที่ยอดเยี่ยมของการพัฒนาด้านวิทยาศาสตร์และเทคโนโลยีอย่างอิสระ โดยการแลกเปลี่ยนข้อมูลที่ได้รับและความพยายามร่วมกัน เพื่อสร้างเครื่องมืออันทรงพลังใหม่สำหรับการวิจัยทางวิทยาศาสตร์ จุดสุดยอดของฟิสิกส์คลาสสิกคือทฤษฎีของสนามแม่เหล็กไฟฟ้า ซึ่งอธิบายการแพร่กระจายของแสง การเกิดขึ้นของสนามไฟฟ้าและสนามแม่เหล็ก การเคลื่อนที่ของอนุภาคที่มีประจุในสนามเหล่านี้ในฐานะการแพร่กระจายของคลื่นแม่เหล็กไฟฟ้า ออปติกแบบคลื่นทำให้เกิดปรากฏการณ์การเลี้ยวเบน กลไกการเกิดภาพ และปัจจัยที่กำหนดความละเอียดในกล้องจุลทรรศน์แบบใช้แสงอย่างชัดเจน เราเป็นหนี้ความสำเร็จในสาขาฟิสิกส์เชิงทฤษฎีและการทดลองจากการค้นพบอิเล็กตรอนที่มีคุณสมบัติเฉพาะของมัน การพัฒนาที่แยกจากกันและดูเหมือนเป็นอิสระเหล่านี้นำไปสู่การสร้างรากฐานของเลนส์อิเล็กตรอน ซึ่งเป็นหนึ่งในการใช้งานที่สำคัญที่สุดคือการประดิษฐ์ EM ในช่วงทศวรรษที่ 1930 คำใบ้โดยตรงของความเป็นไปได้นี้ถือได้ว่าเป็นสมมติฐานของธรรมชาติคลื่นของอิเล็กตรอน นำเสนอในปี 1924 โดย Louis de Broglie และได้รับการยืนยันจากการทดลองในปี 1927 โดย K. Davisson และ L. Germer ในสหรัฐอเมริกาและ J. Thomson ในอังกฤษ ดังนั้นจึงมีการแนะนำการเปรียบเทียบซึ่งทำให้สามารถสร้าง EM ได้ตามกฎหมายของเลนส์คลื่น H. Bush ค้นพบว่าภาพอิเล็กทรอนิกส์สามารถเกิดขึ้นได้โดยใช้สนามไฟฟ้าและสนามแม่เหล็ก ในช่วงสองทศวรรษแรกของศตวรรษที่ 20 มีการสร้างข้อกำหนดเบื้องต้นทางเทคนิคที่จำเป็นด้วย ห้องปฏิบัติการทางอุตสาหกรรมที่ทำงานบนออสซิลโลสโคปแบบแคโทดเรย์มีเทคโนโลยีสุญญากาศ แหล่งกำเนิดไฟฟ้าแรงสูงและกระแสไฟสูงที่เสถียร และตัวปล่อยอิเล็กตรอนที่ดี
ในปี 1931 R. Rudenberg ได้ยื่นคำขอรับสิทธิบัตรสำหรับกล้องจุลทรรศน์อิเล็กตรอนแบบส่องผ่าน และในปี 1932 M. Knoll และ E. Ruska ได้สร้างกล้องจุลทรรศน์ดังกล่าวขึ้นเครื่องแรกโดยใช้เลนส์แม่เหล็กเพื่อโฟกัสอิเล็กตรอน เครื่องมือนี้เป็นบรรพบุรุษของกล้องจุลทรรศน์อิเล็กตรอนแบบส่องผ่านแสงสมัยใหม่ (OTEM) (ได้รับรางวัลโนเบลสาขาฟิสิกส์ในปี 1986 รุสกาสำหรับผลงานของเขา) ในปี ค.ศ. 1938 รุสกาและบี. ฟอน บอร์รีส์ได้สร้าง OPEM อุตสาหกรรมต้นแบบสำหรับซีเมนส์-ฮัลสเกในเยอรมนี ในที่สุดเครื่องมือนี้ทำให้ได้ความละเอียด 100 นาโนเมตรในที่สุด ไม่กี่ปีต่อมา A. Prebus และ J. Hiller ได้สร้าง OPEM ความละเอียดสูงขึ้นเครื่องแรกที่มหาวิทยาลัยโตรอนโต (แคนาดา)
ความเป็นไปได้มากมายของ OPEM ปรากฏชัดเกือบจะในทันที การผลิตเชิงอุตสาหกรรมเริ่มต้นพร้อมกันโดย Siemens-Halske ในเยอรมนีและ RCA Corporation ในสหรัฐอเมริกา ในช่วงปลายทศวรรษ 1940 บริษัทอื่นๆ เริ่มผลิตอุปกรณ์ดังกล่าว
SEM ในรูปแบบปัจจุบันถูกประดิษฐ์ขึ้นในปี 1952 โดย Charles Otley จริงอยู่ รุ่นเบื้องต้นของอุปกรณ์ดังกล่าวถูกสร้างขึ้นโดย Knoll ในเยอรมนีในช่วงทศวรรษที่ 1930 และโดย Zworykin กับพนักงานที่บริษัท RCA ในปี 1940 แต่มีเพียงอุปกรณ์ Otley เท่านั้นที่สามารถใช้เป็นพื้นฐานสำหรับการปรับปรุงทางเทคนิคจำนวนหนึ่งซึ่งมีผลสำเร็จใน การเปิดตัว SEM เวอร์ชันอุตสาหกรรมสู่การผลิตในช่วงกลางทศวรรษ 1960 วงกลมของผู้บริโภคของอุปกรณ์ที่ค่อนข้างใช้งานง่ายซึ่งมีภาพสามมิติและสัญญาณเอาท์พุตอิเล็กทรอนิกส์ได้ขยายตัวด้วยความเร็วของการระเบิด ปัจจุบัน มีผู้ผลิต SEM ทางอุตสาหกรรมหลายสิบรายในสามทวีปและอุปกรณ์ดังกล่าวนับหมื่นที่ใช้ในห้องปฏิบัติการทั่วโลก ในปี 1960 กล้องจุลทรรศน์แรงดันสูงพิเศษได้รับการพัฒนาเพื่อศึกษาตัวอย่างที่หนาขึ้น โดยที่อุปกรณ์ที่มีแรงดันไฟฟ้าแบบเร่งความเร็วของ 3.5 ล้านโวลต์ถูกนำไปใช้งานในปี 1970 RTM ถูกประดิษฐ์ขึ้นโดย G. Binnig และ G. Rohrer ในเมืองซูริกในปี 1979 อุปกรณ์ที่เรียบง่ายมากนี้ให้ความละเอียดของอะตอมของพื้นผิว Binnig และ Rohrer (พร้อมกับ Ruska) ได้รับรางวัลโนเบลสาขา การสร้าง RTM
กล้องจุลทรรศน์โพรบสแกนถูกประดิษฐ์ขึ้นในปี 1986 โดย Rohrer และ Binnig นับตั้งแต่มีการประดิษฐ์ขึ้น STM ได้รับการใช้กันอย่างแพร่หลายโดยนักวิทยาศาสตร์ที่เชี่ยวชาญพิเศษต่างๆ ครอบคลุมสาขาวิชาวิทยาศาสตร์ธรรมชาติเกือบทั้งหมด ตั้งแต่การวิจัยขั้นพื้นฐานในฟิสิกส์ เคมี ชีววิทยา ไปจนถึงการประยุกต์ใช้เทคโนโลยีเฉพาะ หลักการทำงานของ STM นั้นเรียบง่ายมาก และความเป็นไปได้ที่เป็นไปได้นั้นยิ่งใหญ่มากจนไม่สามารถคาดการณ์ผลกระทบต่อวิทยาศาสตร์และเทคโนโลยีได้แม้ในอนาคตอันใกล้
เมื่อมันปรากฏออกมาในภายหลัง แทบทุกการโต้ตอบของโพรบปลายกับพื้นผิว (เครื่องกล, แม่เหล็ก) สามารถแปลงเป็นภาพของพื้นผิวได้โดยใช้เครื่องมือที่เหมาะสมและโปรแกรมคอมพิวเตอร์
การติดตั้งกล้องจุลทรรศน์โพรบสแกนประกอบด้วยบล็อกการทำงานหลายชุดดังแสดงในรูปที่ 1. นี่คือประการแรก กล้องจุลทรรศน์เองที่มี piezomanipulator สำหรับควบคุมโพรบ ตัวแปลงกระแสเป็นแรงดันในอุโมงค์ และสเต็ปเปอร์มอเตอร์สำหรับการจ่ายตัวอย่าง บล็อกของตัวแปลงอนาล็อกเป็นดิจิตอลและดิจิตอลเป็นแอนะล็อกและแอมพลิฟายเออร์แรงดันสูง ชุดควบคุมสเต็ปเปอร์มอเตอร์ บอร์ดที่มีตัวประมวลผลสัญญาณที่คำนวณสัญญาณตอบรับ คอมพิวเตอร์ที่รวบรวมข้อมูลและจัดเตรียมส่วนต่อประสานกับผู้ใช้ โครงสร้าง หน่วย DAC และ ADC ได้รับการติดตั้งในตัวเรือนเดียวกันกับชุดควบคุมสเต็ปเปอร์มอเตอร์ บอร์ดที่มีตัวประมวลผลสัญญาณ (DSP - Digital Signal Processor) ADSP 2171 จาก Analog Devices ได้รับการติดตั้งในช่องขยาย ISA ของคอมพิวเตอร์ส่วนบุคคล
มุมมองทั่วไปของระบบกลไกของกล้องจุลทรรศน์แสดงไว้ในรูปที่ 2. ระบบกลไกประกอบด้วยฐานที่มีเครื่องควบคุมการเคลื่อนที่แบบพายโซมานิพัลเตอร์และระบบป้อนตัวอย่างที่ราบรื่นบนสเต็ปเปอร์มอเตอร์ที่มีกระปุกเกียร์และหัววัดแบบถอดได้สองหัวสำหรับการทำงานในโหมดสแกนอุโมงค์และโหมดกล้องจุลทรรศน์กำลังอะตอม กล้องจุลทรรศน์ช่วยให้ได้ความละเอียดของอะตอมที่เสถียรบนพื้นผิวการทดสอบแบบเดิมโดยไม่ต้องใช้ตัวกรองคลื่นไหวสะเทือนและอะคูสติกเพิ่มเติม
2. หลักการทำงานของกล้องจุลทรรศน์โพรบสแกน
ในกล้องจุลทรรศน์โพรบสแกน การศึกษาไมโครรีลีฟพื้นผิวและคุณสมบัติเฉพาะของไมโครสโคปนั้นดำเนินการโดยใช้โพรบที่เตรียมมาเป็นพิเศษในรูปของเข็ม ส่วนที่ทำงานของโพรบดังกล่าว (ส่วนปลาย) มีขนาดประมาณสิบนาโนเมตร ระยะห่างระหว่างโพรบกับพื้นผิวตัวอย่างในกล้องจุลทรรศน์โพรบคือ 0.1-10 นาโนเมตร ตามลำดับขนาด การทำงานของไมโครสโคปโพรบขึ้นอยู่กับการโต้ตอบประเภทต่างๆ ระหว่างโพรบกับพื้นผิว ดังนั้น การทำงานของกล้องจุลทรรศน์แบบเจาะอุโมงค์จึงขึ้นอยู่กับปรากฏการณ์ของกระแสในอุโมงค์ที่ไหลระหว่างเข็มโลหะกับตัวอย่างที่เป็นตัวนำ ปฏิกิริยาระหว่างแรงประเภทต่างๆ รองรับการทำงานของแรงอะตอม แรงแม่เหล็ก และกล้องจุลทรรศน์กำลังไฟฟ้า ให้เราพิจารณาคุณสมบัติทั่วไปที่มีอยู่ในกล้องจุลทรรศน์โพรบต่างๆ ปล่อยให้การโต้ตอบของโพรบกับพื้นผิวถูกกำหนดโดยพารามิเตอร์ P บางส่วน หากมีการพึ่งพาพารามิเตอร์ P แบบหนึ่งต่อหนึ่งที่คมชัดเพียงพอและแบบหนึ่งต่อหนึ่งบนระยะโพรบ-ตัวอย่าง พารามิเตอร์นี้สามารถใช้เพื่อจัดระเบียบความคิดเห็น ระบบ (FS) ที่ควบคุมระยะห่างระหว่างโพรบกับตัวอย่าง ในรูป 3 แผนผังแสดงหลักการทั่วไปขององค์กรผลตอบรับ SPM
ระบบป้อนกลับจะรักษาค่าของพารามิเตอร์ Р ค่าคงที่ เท่ากับค่าที่ระบุโดยตัวดำเนินการ หากระยะห่างระหว่างโพรบกับพื้นผิวเปลี่ยนแปลง พารามิเตอร์ P จะเปลี่ยนไป ในระบบ OS สัญญาณความแตกต่างจะถูกสร้างขึ้นตามสัดส่วนของค่า ΔP = P - P ซึ่งจะขยายเป็นค่าที่ต้องการและป้อนไปยังองค์ประกอบกระตุ้นของ ไออี องค์ประกอบกระตุ้นจะประมวลผลสัญญาณความแตกต่างนี้โดยการย้ายโพรบเข้าใกล้พื้นผิวมากขึ้นหรือเคลื่อนออกไปจนกว่าสัญญาณความแตกต่างจะกลายเป็นศูนย์ ด้วยวิธีนี้ สามารถรักษาระยะห่างของโพรบตัวอย่างได้อย่างแม่นยำ เมื่อโพรบเคลื่อนที่ไปตามพื้นผิวของตัวอย่าง พารามิเตอร์การโต้ตอบ P จะเปลี่ยนแปลงเนื่องจากภูมิประเทศของพื้นผิว ระบบปฏิบัติการดำเนินการเปลี่ยนแปลงเหล่านี้ ดังนั้นเมื่อโพรบเคลื่อนที่ในระนาบ X, Y สัญญาณบนองค์ประกอบกระตุ้นจะกลายเป็นสัดส่วนกับภูมิประเทศพื้นผิว เพื่อให้ได้ภาพ SPM จะมีการดำเนินการตามขั้นตอนการสแกนตัวอย่างที่จัดเป็นพิเศษ เมื่อทำการสแกน โพรบจะเคลื่อนที่เหนือตัวอย่างตามเส้นหนึ่ง (การสแกนเส้น) ในขั้นแรก ในขณะที่ค่าสัญญาณบนองค์ประกอบกระตุ้นตามสัดส่วนกับภูมิประเทศพื้นผิว จะถูกบันทึกในหน่วยความจำของคอมพิวเตอร์ จากนั้นโพรบจะกลับไปที่จุดเริ่มต้นและไปที่บรรทัดการสแกนถัดไป (การสแกนเฟรม) และกระบวนการจะทำซ้ำอีกครั้ง สัญญาณป้อนกลับที่บันทึกด้วยวิธีนี้ระหว่างการสแกนจะถูกประมวลผลโดยคอมพิวเตอร์ จากนั้นภาพ SPM ของภูมิประเทศพื้นผิวจะถูกสร้างขึ้นโดยใช้คอมพิวเตอร์กราฟิก นอกจากการศึกษาภูมิประเทศพื้นผิวแล้ว กล้องจุลทรรศน์โพรบยังทำให้สามารถศึกษาคุณสมบัติพื้นผิวต่างๆ ได้: เครื่องกล ไฟฟ้า แม่เหล็ก ออปติคัล และอื่นๆ
3. การสแกนองค์ประกอบ (สแกนเนอร์) ของกล้องจุลทรรศน์โพรบ
3.1 การสแกนองค์ประกอบ
ในการใช้งานกล้องจุลทรรศน์โพรบ จำเป็นต้องควบคุมระยะการทำงานของโพรบตัวอย่าง และย้ายโพรบในระนาบตัวอย่างด้วยความแม่นยำสูง (ที่ระดับเศษส่วนของอังสตรอม) ปัญหานี้แก้ไขได้ด้วยความช่วยเหลือของผู้ควบคุมพิเศษ - องค์ประกอบการสแกน (สแกนเนอร์) องค์ประกอบการสแกนของกล้องจุลทรรศน์โพรบทำจากเพียโซอิเล็กทริก ซึ่งเป็นวัสดุที่มีคุณสมบัติเพียโซอิเล็กทริก Piezoelectrics เปลี่ยนขนาดในสนามไฟฟ้าภายนอก สมการสำหรับผลเพียโซอิเล็กทริกผกผันสำหรับผลึกเขียนเป็น:
โดยที่ u คือเทนเซอร์ความเครียด E คือส่วนประกอบของสนามไฟฟ้า และ d คือส่วนประกอบของเทนเซอร์สัมประสิทธิ์เพียโซอิเล็กทริก รูปแบบของเทนเซอร์สัมประสิทธิ์สัมประสิทธิ์เพียโซอิเล็กทริกนั้นพิจารณาจากประเภทของสมมาตรของผลึก
ในการใช้งานด้านเทคนิคต่างๆ มีการใช้ทรานสดิวเซอร์ที่ทำจากวัสดุ piezoceramic อย่างแพร่หลาย Piezoceramics เป็นวัสดุโพลีคริสตัลไลน์โพลาไรซ์ที่ได้จากการเผาผงจากผลึกเฟอร์โรอิเล็กทริก โพลาไรเซชันของเซรามิกดำเนินการดังนี้ เซรามิกส์ได้รับความร้อนสูงกว่าอุณหภูมิคูรี (สำหรับเพียโซเซรามิกส์ส่วนใหญ่ อุณหภูมินี้ต่ำกว่า 300 องศาเซลเซียส) แล้วค่อยๆ ระบายความร้อนด้วยสนามไฟฟ้าที่แรง (ประมาณ 3 kV/ซม.) หลังจากเย็นตัวลง piezoceramic จะเหนี่ยวนำให้เกิดโพลาไรซ์และได้ความสามารถในการเปลี่ยนขนาด (เพิ่มขึ้นหรือลดลงขึ้นอยู่กับทิศทางร่วมกันของเวกเตอร์โพลาไรซ์และเวกเตอร์สนามไฟฟ้าภายนอก)
องค์ประกอบเพียโซอิเล็กทริกแบบท่อถูกนำมาใช้กันอย่างแพร่หลายในกล้องจุลทรรศน์โพรบสแกน (รูปที่ 4) ทำให้สามารถรับการกระจัดของวัตถุขนาดใหญ่เพียงพอที่แรงดันไฟฟ้าควบคุมที่ค่อนข้างเล็ก องค์ประกอบเพียโซอิเล็กทริกแบบท่อเป็นทรงกระบอกกลวงผนังบางที่ทำจากวัสดุเพียโซเซรามิก โดยปกติ อิเล็กโทรดในรูปแบบของชั้นโลหะบาง ๆ จะถูกวางบนพื้นผิวด้านนอกและด้านในของท่อ ในขณะที่ปลายของท่อยังคงไม่เคลือบผิว
ภายใต้อิทธิพลของความต่างศักย์ระหว่างอิเล็กโทรดภายในและภายนอก หลอดจะเปลี่ยนขนาดตามยาว ในกรณีนี้ การเสียรูปตามยาวภายใต้การกระทำของสนามไฟฟ้าในแนวรัศมีสามารถเขียนได้ดังนี้:
โดยที่ l คือความยาวของท่อในสภาพที่ไม่เป็นรูปเป็นร่าง การยืดตัวสัมบูรณ์ของ piezotube คือ
โดยที่ h คือความหนาของผนังของ piezotube, V คือความต่างศักย์ระหว่างอิเล็กโทรดภายในและภายนอก ดังนั้นที่แรงดันไฟฟ้า V เท่ากัน การยืดตัวของท่อจะยิ่งมากขึ้น ความยาวและความหนาของผนังที่เล็กลง
การเชื่อมต่อของท่อสามท่อในโหนดเดียวช่วยให้สามารถจัดระเบียบการเคลื่อนที่ของโพรบกล้องจุลทรรศน์ได้อย่างแม่นยำในสามทิศทางที่ตั้งฉากกัน องค์ประกอบการสแกนดังกล่าวเรียกว่าขาตั้งกล้อง
ข้อเสียของสแกนเนอร์ดังกล่าวคือความซับซ้อนของการผลิตและความไม่สมดุลของการออกแบบ ในปัจจุบัน เครื่องสแกนที่ใช้องค์ประกอบแบบท่อเดียวถูกใช้อย่างแพร่หลายที่สุดในกล้องจุลทรรศน์โพรบสแกน มุมมองทั่วไปของเครื่องสแกนแบบท่อและเลย์เอาต์ของอิเล็กโทรดจะแสดงในรูปที่ 5. วัสดุของหลอดมีทิศทางรัศมีของเวกเตอร์โพลาไรซ์
อิเล็กโทรดภายในมักจะแข็ง อิเล็กโทรดด้านนอกของสแกนเนอร์แบ่งออกเป็นสี่ส่วนตามกำเนิดของกระบอกสูบ เมื่อแรงดันแอนติเฟสถูกนำไปใช้กับส่วนตรงข้ามของอิเล็กโทรดภายนอก (เทียบกับขั้วใน) ส่วนท่อจะหดตัวในตำแหน่งที่ทิศทางสนามตรงกับทิศทางโพลาไรซ์ และการยืดตัวเกิดขึ้นในทิศทางตรงกันข้าม ทำให้ท่องอไปในทิศทางที่เหมาะสม ดังนั้นการสแกนจะดำเนินการในระนาบ X, Y การเปลี่ยนแปลงศักยภาพของอิเล็กโทรดภายในที่สัมพันธ์กับส่วนภายนอกทั้งหมดนำไปสู่การยืดหรือหดตัวของท่อตามแนวแกน Z ดังนั้นจึงเป็นไปได้ที่จะจัดระเบียบสาม - เครื่องสแกนพิกัดตาม piezotube เดียว องค์ประกอบการสแกนจริงมักมีการออกแบบที่ซับซ้อนกว่า แต่หลักการทำงานยังคงเหมือนเดิม
เครื่องสแกนที่ใช้องค์ประกอบ bimorph piezoelectric ก็ใช้กันอย่างแพร่หลายเช่นกัน bimorph คือแผ่นเพียโซอิเล็กทริกสองแผ่นที่ติดกาวเข้าด้วยกันในลักษณะที่เวกเตอร์โพลาไรซ์ในแต่ละแผ่นมีทิศทางตรงกันข้าม (รูปที่ 6) หากใช้แรงดันไฟฟ้ากับอิเล็กโทรดแบบไบมอร์ฟ ดังแสดงในรูปที่ 6 จากนั้นแผ่นเปลือกโลกแผ่นหนึ่งจะขยายตัวและอีกแผ่นหนึ่งจะหดตัวซึ่งจะนำไปสู่การดัดขององค์ประกอบทั้งหมด ในการออกแบบองค์ประกอบ bimorph อย่างแท้จริง ความต่างศักย์จะถูกสร้างขึ้นระหว่างขั้วไฟฟ้าภายในและขั้วไฟฟ้าภายนอก ดังนั้นในองค์ประกอบหนึ่ง สนามจะสอดคล้องกับทิศทางของเวกเตอร์โพลาไรซ์ และในอีกองค์ประกอบหนึ่งมีทิศทางตรงกันข้าม
การดัดแบบไบมอร์ฟภายใต้การกระทำของสนามไฟฟ้าเป็นพื้นฐานสำหรับการทำงานของเครื่องสแกนเพียโซสแกนแบบไบมอร์ฟ ด้วยการรวมองค์ประกอบ bimorph สามชิ้นเข้าด้วยกันในโครงสร้างเดียว ทำให้สามารถใช้ขาตั้งกล้องกับองค์ประกอบ bimorph ได้
หากอิเล็กโทรดด้านนอกขององค์ประกอบไบมอร์ฟแบ่งออกเป็นสี่ส่วน ก็เป็นไปได้ที่จะจัดระเบียบการเคลื่อนที่ของโพรบตามแกน Z และในระนาบ X, Y บนองค์ประกอบไบมอร์ฟหนึ่งองค์ประกอบ (รูปที่ 7)
อันที่จริง การใช้แรงดันแอนติเฟสกับคู่ตรงข้ามของส่วนต่าง ๆ ของอิเล็กโทรดภายนอก มันเป็นไปได้ที่จะดัดไบมอร์ฟเพื่อให้โพรบเคลื่อนที่ในระนาบ X, Y (รูปที่ 7 (a, b)) และด้วยการเปลี่ยนศักยภาพของอิเล็กโทรดภายในที่สัมพันธ์กับทุกส่วนของอิเล็กโทรดภายนอก ทำให้ไบมอร์ฟดัดได้โดยการเคลื่อนโพรบไปในทิศทาง Z (รูปที่ 7 (c, d))
3.2 ความไม่เชิงเส้นของพีโซเซรามิกส์
แม้จะมีข้อได้เปรียบทางเทคโนโลยีมากกว่าคริสตัลหลายประการ แต่ piezoceramics มีข้อเสียบางประการที่ส่งผลเสียต่อการทำงานขององค์ประกอบการสแกน ข้อเสียเปรียบประการหนึ่งคือความไม่เป็นเชิงเส้นของคุณสมบัติเพียโซอิเล็กทริก ในรูป ตัวอย่างเช่น 8 การพึ่งพาการกระจัดของ piezotube ในทิศทาง Z กับขนาดของสนามที่ใช้จะแสดง ในกรณีทั่วไป (โดยเฉพาะที่สนามที่มีการควบคุมสูง) piezoceramics มีลักษณะเฉพาะจากการเสียรูปแบบไม่เชิงเส้นบนสนาม (หรือบนแรงดันควบคุม)
ดังนั้น การเสียรูปของ piezoceramic จึงเป็นฟังก์ชันที่ซับซ้อนของสนามไฟฟ้าภายนอก:
สำหรับฟิลด์ควบคุมขนาดเล็ก การขึ้นต่อกันนี้สามารถแสดงในรูปแบบต่อไปนี้:
u = d* E+ α* E*E+…
โดยที่ d และ α เป็นโมดูลเชิงเส้นและกำลังสองของเอฟเฟกต์เพียโซอิเล็กทริก
ค่าทั่วไปของฟิลด์ E ซึ่งเริ่มแสดงเอฟเฟกต์ที่ไม่เป็นเชิงเส้น อยู่ในลำดับ 100 V/mm ดังนั้น สำหรับการทำงานที่ถูกต้องขององค์ประกอบการสแกน ฟิลด์ควบคุมมักจะใช้ในพื้นที่เชิงเส้นของเซรามิก (E< Е) .
กล้องจุลทรรศน์อิเล็กตรอนแบบส่องกราด
3.3 Piezo เซรามิกคืบและเพียโซเซรามิก hysteresis
ข้อเสียอีกประการของ piezoceramics คือสิ่งที่เรียกว่าครีพ (creep - creep) - ความล่าช้าในการตอบสนองต่อการเปลี่ยนแปลงขนาดของสนามไฟฟ้าควบคุม
การคืบทำให้เกิดการบิดเบี้ยวทางเรขาคณิตที่เกี่ยวข้องกับเอฟเฟกต์นี้ในรูปภาพ SPM คืบจะแข็งแรงเป็นพิเศษเมื่อสแกนเนอร์ถูกนำไปยังจุดที่กำหนดสำหรับการวัดในพื้นที่และในขั้นตอนเริ่มต้นของกระบวนการสแกน เพื่อลดผลกระทบของการคืบของเซรามิก การหน่วงเวลาจะถูกนำไปใช้ในกระบวนการเหล่านี้ ซึ่งช่วยให้สามารถชดเชยความล่าช้าของสแกนเนอร์ได้บางส่วน
ข้อเสียอีกประการของ piezoceramics คือความกำกวมของการพึ่งพาการยืดตัวในทิศทางของการเปลี่ยนแปลงในสนามไฟฟ้า (hysteresis)
สิ่งนี้นำไปสู่ความจริงที่ว่าที่แรงดันควบคุมเดียวกัน piezoceramic อยู่ที่จุดต่าง ๆ ของวิถีขึ้นอยู่กับทิศทางของการเคลื่อนไหว เพื่อแยกความผิดเพี้ยนของภาพ SPM เนื่องจากฮิสเทรีซิสของเพียโซเซรามิกส์ ข้อมูลจะถูกบันทึกเมื่อสแกนตัวอย่างเฉพาะหนึ่งในกิ่งของการพึ่งพาอาศัยกันเท่านั้น
4. อุปกรณ์สำหรับการเคลื่อนที่ที่แม่นยำของโพรบและตัวอย่าง
4.1 กระปุกเกียร์เครื่องกล
ปัญหาทางเทคนิคที่สำคัญอย่างหนึ่งในการสแกนด้วยกล้องจุลทรรศน์โพรบคือความต้องการการเคลื่อนที่ของโพรบและตัวอย่างที่แม่นยำเพื่อสร้างช่องว่างการทำงานของกล้องจุลทรรศน์และเลือกพื้นที่ของพื้นผิวที่จะทำการศึกษา เพื่อแก้ปัญหานี้ มีการใช้อุปกรณ์ประเภทต่างๆ ในการเคลื่อนย้ายวัตถุด้วยความแม่นยำสูง กล่องเกียร์แบบกลไกต่างๆ ถูกนำมาใช้กันอย่างแพร่หลาย ซึ่งการเคลื่อนที่แบบหยาบของผู้เสนอญัตติเริ่มต้นจะสอดคล้องกับการเคลื่อนที่แบบละเอียดของวัตถุที่กำลังเคลื่อนที่ วิธีการลดการกระจัดอาจแตกต่างกัน อุปกรณ์คันโยกใช้กันอย่างแพร่หลายซึ่งลดปริมาณการเคลื่อนไหวลงเนื่องจากความแตกต่างในความยาวของแขนของคันโยก โครงร่างของกระปุกเกียร์แบบคันโยกแสดงในรูปที่ 9.
คันโยกเชิงกลทำให้สามารถลดการกระจัดด้วยค่าสัมประสิทธิ์
ดังนั้น ยิ่งอัตราส่วนของแขน L ต่อแขน l สูงขึ้นเท่าใด ก็ยิ่งสามารถควบคุมกระบวนการเข้าใกล้โพรบและตัวอย่างได้แม่นยำมากขึ้นเท่านั้น
นอกจากนี้ ในการออกแบบไมโครสโคปนั้น กล่องเกียร์แบบกลไกยังใช้กันอย่างแพร่หลาย ซึ่งสามารถลดการเคลื่อนที่ได้เนื่องจากความแตกต่างในค่าสัมประสิทธิ์ความแข็งขององค์ประกอบยืดหยุ่นสองชิ้นที่เชื่อมต่อแบบอนุกรม (รูปที่ 10) การออกแบบประกอบด้วยฐานแข็ง สปริง และคานยางยืด เลือกความแข็งของสปริง k และคานยางยืด K เพื่อให้เป็นไปตามเงื่อนไขต่อไปนี้: k< K .
ค่ารีดิวซ์แฟกเตอร์เท่ากับอัตราส่วนของค่าสัมประสิทธิ์ความแข็งขององค์ประกอบยืดหยุ่น:
ดังนั้น ยิ่งอัตราส่วนของความแข็งของลำแสงต่อความแข็งของสปริงมากเท่าไร ก็ยิ่งสามารถควบคุมการเคลื่อนที่ขององค์ประกอบการทำงานของกล้องจุลทรรศน์ได้แม่นยำยิ่งขึ้น
4.2 สเต็ปเปอร์มอเตอร์
สเต็ปเปอร์มอเตอร์ (SHED) เป็นอุปกรณ์ไฟฟ้าเครื่องกลที่แปลงแรงกระตุ้นไฟฟ้าเป็นการเคลื่อนไหวทางกลแบบไม่ต่อเนื่อง ข้อได้เปรียบที่สำคัญของสเต็ปเปอร์มอเตอร์คือให้การพึ่งพาตำแหน่งของโรเตอร์บนพัลส์กระแสไฟขาเข้าอย่างชัดเจน ดังนั้นมุมของการหมุนของโรเตอร์จะถูกกำหนดโดยจำนวนของพัลส์ควบคุม ใน SHED แรงบิดถูกสร้างขึ้นโดยฟลักซ์แม่เหล็กที่สร้างขึ้นโดยเสาสเตเตอร์และโรเตอร์ซึ่งมีการวางแนวอย่างเหมาะสมสัมพันธ์กัน
การออกแบบที่ง่ายที่สุดคือมอเตอร์แม่เหล็กถาวร ประกอบด้วยสเตเตอร์ที่มีขดลวดและโรเตอร์ที่มีแม่เหล็กถาวร ในรูป 11 แสดงการออกแบบที่เรียบง่ายของสเต็ปเปอร์มอเตอร์
ขั้วไฟฟ้าสลับของโรเตอร์มีรูปร่างเป็นเส้นตรงและขนานกับแกนของมอเตอร์ มอเตอร์ที่แสดงในรูปมีขั้วโรเตอร์ 3 คู่และเสาสเตเตอร์ 2 คู่ มอเตอร์มีขดลวดอิสระ 2 เส้น ซึ่งแต่ละขดลวดพันบนเสาตรงข้ามกันสองขั้วของสเตเตอร์ มอเตอร์ที่แสดงมีขนาดขั้นบันได 30 องศา เมื่อกระแสไฟถูกเปิดในขดลวดอันใดอันหนึ่ง โรเตอร์มีแนวโน้มที่จะเข้ารับตำแหน่งที่ขั้วตรงข้ามของโรเตอร์และสเตเตอร์อยู่ตรงข้ามกัน สำหรับการหมุนอย่างต่อเนื่อง คุณต้องเปิดขดลวดสลับกัน
ในทางปฏิบัติมีการใช้สเต็ปเปอร์มอเตอร์ซึ่งมีการออกแบบที่ซับซ้อนมากขึ้นและให้โรเตอร์ตั้งแต่ 100 ถึง 400 ขั้นต่อการหมุนรอบ หากเครื่องยนต์ดังกล่าวถูกจับคู่กับการเชื่อมต่อแบบเกลียว ดังนั้นด้วยระยะพิทช์ของเกลียวประมาณ 0.1 มม. จะรับประกันความแม่นยำในการวางตำแหน่งวัตถุประมาณ 0.25 - 1 ไมครอน เพื่อเพิ่มความแม่นยำจะใช้กระปุกเกียร์แบบกลไกเพิ่มเติม ความเป็นไปได้ของการควบคุมไฟฟ้าทำให้สามารถใช้ SHED ในระบบอัตโนมัติได้อย่างมีประสิทธิภาพสำหรับการเข้าใกล้โพรบและตัวอย่างของกล้องจุลทรรศน์โพรบสแกน
4.3 Piezo สเต็ปเปอร์มอเตอร์
ข้อกำหนดสำหรับการแยกอุปกรณ์ออกจากการสั่นสะเทือนภายนอกที่ดี และความจำเป็นในการใช้งานกล้องจุลทรรศน์โพรบในสภาวะสุญญากาศ กำหนดข้อจำกัดที่ร้ายแรงเกี่ยวกับการใช้อุปกรณ์กลไกล้วนๆ สำหรับการเคลื่อนย้ายโพรบและตัวอย่าง ในเรื่องนี้ อุปกรณ์ที่ใช้ทรานสดิวเซอร์แบบเพียโซอิเล็กทริก ซึ่งช่วยให้สามารถควบคุมการเคลื่อนที่ของวัตถุได้จากระยะไกล ถูกนำมาใช้กันอย่างแพร่หลายในกล้องจุลทรรศน์โพรบ
หนึ่งในการออกแบบของมอเตอร์เพียโซอิเล็กทริกเฉื่อยแบบสเต็ปแสดงในรูปที่ 12. อุปกรณ์นี้มีฐาน (1) ซึ่งยึดท่อเพียโซอิเล็กทริก (2) หลอดมีอิเล็กโทรด (3) ที่พื้นผิวด้านนอกและด้านใน ที่ปลายท่อ สปริงแยก (4) ได้รับการแก้ไข ซึ่งเป็นทรงกระบอกที่มีกลีบสปริงแยกจากกัน สปริงยึดวัตถุ (5) ติดตั้งอยู่ ซึ่งเป็นทรงกระบอกขนาดใหญ่ที่มีพื้นผิวขัดมัน วัตถุที่จะเคลื่อนย้ายสามารถติดเข้ากับที่ยึดด้วยสปริงหรือน็อตแบบยูเนี่ยน ซึ่งช่วยให้อุปกรณ์ทำงานในทิศทางใดก็ได้ในอวกาศ
อุปกรณ์ทำงานดังนี้ ในการเคลื่อนตัวจับวัตถุไปในทิศทางของแกน Z แรงดันพัลซิ่งฟันเลื่อยจะถูกนำไปใช้กับอิเล็กโทรดของ piezotube (รูปที่ 13)
บนขอบแบนของแรงดันไฟแบบฟันเลื่อย ท่อจะยืดหรือหดตัวอย่างราบรื่นขึ้นอยู่กับขั้วของแรงดันไฟ และปลายท่อพร้อมกับสปริงและที่จับวัตถุ จะถูกแทนที่ตามระยะทาง:
ในขณะที่ปล่อยแรงดันฟันเลื่อย ท่อจะกลับสู่ตำแหน่งเดิมด้วยความเร่ง a ซึ่งในขั้นต้นจะมีค่าสูงสุด:
โดยที่ ω คือความถี่เรโซแนนซ์ของการแกว่งตามยาวของท่อ เมื่อเงื่อนไข F< ma (m – масса держателя объекта, F - сила трения между держателем объекта и разрезной пружиной), держатель объекта, в силу своей инерционности, проскальзывает относительно разрезной пружины. В результате держатель объекта перемещается на некоторый шаг К Δl относительно исходного положения. Коэффициент К определяется соотношением масс деталей конструкции и жесткостью разрезной пружины. При смене полярности импульсов управляющего напряжения происходит изменение направления движения объекта. Таким образом, подавая пилообразные напряжения различной полярности на электроды пьезотрубки, можно перемещать объект в пространстве и производить сближение зонда и образца в сканирующем зондовом микроскопе .
5. การป้องกันกล้องจุลทรรศน์โพรบจากอิทธิพลภายนอก
5.1 การป้องกันการสั่นสะเทือน
เพื่อป้องกันอุปกรณ์จากการสั่นสะเทือนภายนอกจึงใช้ระบบแยกการสั่นสะเทือนประเภทต่างๆ ตามอัตภาพพวกเขาสามารถแบ่งออกเป็นแบบพาสซีฟและแบบแอคทีฟ แนวคิดหลักเบื้องหลังระบบแยกการสั่นสะเทือนแบบพาสซีฟมีดังนี้ แอมพลิจูดของการสั่นแบบบังคับของระบบกลไกจะลดลงอย่างรวดเร็วโดยเพิ่มความแตกต่างระหว่างความถี่ของแรงที่น่าตื่นเต้นกับความถี่เรโซแนนซ์ตามธรรมชาติของระบบ (ลักษณะแอมพลิจูด-ความถี่ทั่วไป (AFC) ของระบบออสซิลเลเตอร์แสดงไว้ใน รูปที่ 14)
ดังนั้น อิทธิพลภายนอกที่มีความถี่ ω > ω แทบไม่มีผลกระทบใดๆ ต่อระบบออสซิลเลเตอร์ ดังนั้น หากวางหัววัดของกล้องจุลทรรศน์โพรบไว้บนแท่นแยกแรงสั่นสะเทือนหรือบนระบบกันสะเทือนแบบยืดหยุ่น (รูปที่ 15) การสั่นภายนอกที่มีความถี่ใกล้เคียงกับความถี่เรโซแนนซ์ของระบบแยกการสั่นสะเทือนเท่านั้นที่จะส่งผ่านไปยัง กล้องจุลทรรศน์ เนื่องจากความถี่ธรรมชาติของหัว SPM คือ 10-100 kHz โดยการเลือกความถี่เรโซแนนซ์ของระบบแยกการสั่นสะเทือนให้ต่ำเพียงพอ (ลำดับ 5-10 Hz) จึงสามารถปกป้องอุปกรณ์จากการสั่นสะเทือนภายนอกได้อย่างมีประสิทธิภาพ เพื่อที่จะรองรับการสั่นที่ความถี่เรโซแนนซ์ตามธรรมชาติ องค์ประกอบแบบกระจายที่มีแรงเสียดทานแบบหนืดจะถูกนำเข้าสู่ระบบแยกการสั่นสะเทือน
ดังนั้น เพื่อให้การป้องกันที่มีประสิทธิภาพ ความถี่เรโซแนนซ์ของระบบแยกการสั่นสะเทือนจึงจำเป็นให้ต่ำที่สุด อย่างไรก็ตาม ในทางปฏิบัติเป็นเรื่องยากที่จะรับรู้ความถี่ต่ำมาก
ระบบแอคทีฟสำหรับการระงับการสั่นจากภายนอกถูกนำมาใช้ในการป้องกันหัว SPM ได้สำเร็จ อุปกรณ์ดังกล่าวเป็นระบบเครื่องกลไฟฟ้าที่มีการป้อนกลับเชิงลบซึ่งทำให้มั่นใจได้ถึงตำแหน่งที่มั่นคงของแพลตฟอร์มแยกการสั่นสะเทือนในอวกาศ (รูปที่ 16) .
5.2 การป้องกันเสียงรบกวน
แหล่งที่มาของการสั่นสะเทือนอีกประการขององค์ประกอบโครงสร้างของกล้องจุลทรรศน์โพรบคือเสียงอะคูสติกจากธรรมชาติที่หลากหลาย
คุณลักษณะของการรบกวนทางเสียงคือคลื่นเสียงส่งผลโดยตรงต่อองค์ประกอบโครงสร้างของหัว SPM ซึ่งนำไปสู่การสั่นสะเทือนของโพรบที่สัมพันธ์กับพื้นผิวของตัวอย่างภายใต้การศึกษา เพื่อป้องกัน SPM จากการรบกวนทางเสียง ฝาครอบป้องกันต่างๆ ถูกใช้เพื่อลดระดับการรบกวนทางเสียงในบริเวณช่องว่างการทำงานของกล้องจุลทรรศน์อย่างมาก การป้องกันที่มีประสิทธิภาพสูงสุดต่อการรบกวนทางเสียงคือการวางหัววัดของกล้องจุลทรรศน์โพรบในห้องสุญญากาศ (รูปที่ 17)
5.3 เสถียรภาพของการเคลื่อนตัวทางความร้อนของตำแหน่งของโพรบเหนือพื้นผิว
ปัญหาสำคัญประการหนึ่งของ SPM คือปัญหาการรักษาเสถียรภาพของตำแหน่งของโพรบเหนือพื้นผิวของตัวอย่างที่ศึกษา แหล่งที่มาหลักของความไม่เสถียรของตำแหน่งโพรบคือการเปลี่ยนแปลงของอุณหภูมิแวดล้อมหรือความร้อนขององค์ประกอบโครงสร้างของกล้องจุลทรรศน์โพรบระหว่างการทำงาน การเปลี่ยนแปลงของอุณหภูมิของของแข็งทำให้เกิดการเสียรูปแบบเทอร์โมอิลาสติก การเสียรูปดังกล่าวมีผลอย่างมากต่อการทำงานของกล้องจุลทรรศน์โพรบ เพื่อลดการเบี่ยงเบนจากความร้อน จะมีการควบคุมอุณหภูมิของหัววัด SPM หรือนำองค์ประกอบชดเชยความร้อนมาใช้ในการออกแบบส่วนหัว แนวคิดของการชดเชยความร้อนมีดังนี้ การออกแบบ SPM ใดๆ สามารถแสดงเป็นชุดขององค์ประกอบที่มีค่าสัมประสิทธิ์การขยายตัวทางความร้อนต่างกันได้ (รูปที่ 18 (a))
เพื่อชดเชยการเคลื่อนตัวของความร้อน ส่วนประกอบชดเชยที่มีสัมประสิทธิ์การขยายตัวที่แตกต่างกันได้ถูกนำมาใช้ในการออกแบบหัววัด SPM เพื่อให้เป็นไปตามเงื่อนไขที่ผลรวมของการขยายตัวทางความร้อนในแขนกลต่างๆ ของโครงสร้างจะเท่ากับศูนย์:
ΔL = ∑ ΔL = ΔT ∑αl0
วิธีที่ง่ายที่สุดในการลดความร้อนของตำแหน่งโพรบตามแนวแกน Z คือการแนะนำองค์ประกอบชดเชยที่ทำจากวัสดุชนิดเดียวกันและมีขนาดเฉพาะเดียวกันกับองค์ประกอบโครงสร้างหลักในการออกแบบ SPM (รูปที่ 18 (b)) เมื่ออุณหภูมิของการออกแบบนี้เปลี่ยนไป การกระจัดของโพรบในทิศทาง Z จะน้อยที่สุด เพื่อทำให้ตำแหน่งของโพรบเสถียรในระนาบ X, Y หัววัดของไมโครสโคปจะทำในรูปแบบของโครงสร้างสมมาตรตามแนวแกน
6. การสร้างและการประมวลผลภาพ SPM
6.1 ขั้นตอนการสแกน
ขั้นตอนการสแกนพื้นผิวในกล้องจุลทรรศน์โพรบสแกนคล้ายกับการเคลื่อนที่ของลำอิเล็กตรอนผ่านหน้าจอในหลอดรังสีแคโทดของทีวี โพรบเคลื่อนที่ไปตามเส้น (เส้น) ก่อนไปข้างหน้าแล้วไปในทิศทางตรงกันข้าม (สแกนเส้น) แล้วเลื่อนไปยังบรรทัดถัดไป (การสแกนเฟรม) (รูปที่ 19) การเคลื่อนที่ของโพรบจะดำเนินการโดยใช้เครื่องสแกนในขั้นตอนเล็กๆ ภายใต้การกระทำของแรงดันไฟฟ้าฟันเลื่อยที่สร้างโดยตัวแปลงดิจิทัลเป็นแอนะล็อก การลงทะเบียนข้อมูลเกี่ยวกับภูมิประเทศพื้นผิวจะดำเนินการตามกฎบนทางตรง
ข้อมูลที่ได้รับโดยใช้กล้องจุลทรรศน์โพรบสแกนจะถูกจัดเก็บเป็นเฟรม SPM ซึ่งเป็นอาร์เรย์สองมิติของจำนวนเต็ม a (เมทริกซ์) ความหมายทางกายภาพของตัวเลขเหล่านี้กำหนดโดยค่าที่แปลงเป็นดิจิทัลระหว่างขั้นตอนการสแกน แต่ละค่าของคู่ดัชนี ij สอดคล้องกับจุดหนึ่งของพื้นผิวภายในช่องการสแกน พิกัดของจุดพื้นผิวคำนวณโดยการคูณดัชนีที่สอดคล้องกันด้วยระยะห่างระหว่างจุดที่บันทึกข้อมูลไว้
ตามกฎแล้ว เฟรม SPM เป็นเมทริกซ์สี่เหลี่ยมจัตุรัสที่มีขนาด 2 (ส่วนใหญ่เป็นองค์ประกอบ 256x256 และ 512x512) การแสดงภาพเฟรม SPM ทำได้โดยใช้คอมพิวเตอร์กราฟิก ซึ่งส่วนใหญ่อยู่ในรูปแบบของภาพสามมิติ (3D) และความสว่างสองมิติ (2D) ในการสร้างภาพข้อมูล 3 มิติ ภาพของพื้นผิวถูกสร้างขึ้นในเปอร์สเปคทีฟ axonometric โดยใช้พิกเซลหรือเส้น นอกจากนี้ ยังใช้วิธีการต่างๆ ในการเน้นพิกเซลที่สอดคล้องกับความสูงต่างๆ ของการบรรเทาพื้นผิว วิธีที่มีประสิทธิภาพที่สุดในการทำให้ภาพ 3D มีสีคือการจำลองสภาวะของการส่องสว่างที่พื้นผิวโดยแหล่งกำเนิดจุดที่อยู่ที่จุดใดจุดหนึ่งในอวกาศเหนือพื้นผิว (รูปที่ 20) ในกรณีนี้ เป็นไปได้ที่จะเน้นความไม่สม่ำเสมอเล็กน้อยของการผ่อนปรน นอกจากนี้ ด้วยการประมวลผลคอมพิวเตอร์และกราฟิก การปรับขนาดและการหมุนของภาพ 3D SPM จะถูกนำไปใช้ ในการเรนเดอร์ 2 มิติ แต่ละจุดบนพื้นผิวจะได้รับการกำหนดสี จานสีที่ใช้กันอย่างแพร่หลายมากที่สุดคือจานสีไล่ระดับซึ่งสีของภาพใช้โทนสีใดสีหนึ่งตามความสูงของจุดพื้นผิว
ตามกฎแล้วการวัด SPM ในพื้นที่เกี่ยวข้องกับการลงทะเบียนการพึ่งพาปริมาณภายใต้การศึกษาเกี่ยวกับพารามิเตอร์ต่างๆ ตัวอย่างเช่น การขึ้นต่อกันของขนาดของกระแสไฟฟ้าผ่านหน้าสัมผัสของโพรบกับพื้นผิวของแรงดันไฟฟ้าที่ใช้ การขึ้นต่อกันของพารามิเตอร์ต่างๆ ของปฏิกิริยาระหว่างแรงระหว่างโพรบกับพื้นผิวบนระยะโพรบตัวอย่าง เป็นต้น ข้อมูลถูกจัดเก็บในรูปแบบของเวกเตอร์อาร์เรย์หรือในรูปแบบของ 2 x N เมทริกซ์ สำหรับการแสดงภาพ ซอฟต์แวร์ไมโครสโคปมีชุดเครื่องมือมาตรฐานสำหรับการแสดงกราฟฟังก์ชัน
6.2 วิธีการสร้างและประมวลผลภาพ
เมื่อศึกษาคุณสมบัติของวัตถุโดยใช้กล้องจุลทรรศน์โพรบสแกน ผลลัพธ์หลักของการวิจัยทางวิทยาศาสตร์คือ ตามกฎแล้ว รูปภาพสามมิติของพื้นผิวของวัตถุเหล่านี้ ความเพียงพอของการตีความภาพขึ้นอยู่กับคุณสมบัติของผู้เชี่ยวชาญ ในเวลาเดียวกัน เมื่อประมวลผลและสร้างภาพ มีการใช้เทคนิคดั้งเดิมจำนวนหนึ่ง ซึ่งคุณควรระวังเมื่อวิเคราะห์ภาพ กล้องจุลทรรศน์โพรบสแกนปรากฏขึ้นในช่วงเวลาของการพัฒนาเทคโนโลยีคอมพิวเตอร์อย่างเข้มข้น ดังนั้นเมื่อบันทึกภาพสามมิติจึงใช้วิธีจัดเก็บข้อมูลดิจิทัลที่พัฒนาขึ้นสำหรับคอมพิวเตอร์ สิ่งนี้ส่งผลให้การวิเคราะห์และการประมวลผลภาพสะดวกขึ้นอย่างมาก แต่คุณภาพการถ่ายภาพที่มีอยู่ในวิธีการกล้องจุลทรรศน์อิเล็กตรอนจะต้องเสียสละ ข้อมูลที่ได้รับโดยใช้กล้องจุลทรรศน์โพรบจะแสดงในคอมพิวเตอร์ในรูปแบบของเมทริกซ์สองมิติของจำนวนเต็ม ตัวเลขแต่ละตัวในเมทริกซ์นี้ ขึ้นอยู่กับโหมดการสแกน อาจเป็นค่าของกระแสทันเนล หรือค่าของการโก่งตัว หรือค่าของฟังก์ชันที่ซับซ้อนกว่านี้ หากคุณแสดงเมทริกซ์นี้ให้บุคคลหนึ่งเห็น เขาจะไม่ได้รับแนวคิดที่สอดคล้องกันของพื้นผิวที่กำลังศึกษา ปัญหาแรกคือการแปลงตัวเลขให้อยู่ในรูปแบบที่อ่านได้ นี้จะทำในวิธีต่อไปนี้ ตัวเลขในเมทริกซ์ดั้งเดิมอยู่ในช่วงที่กำหนด มีค่าต่ำสุดและสูงสุด ช่วงของจำนวนเต็มนี้ถูกกำหนดเป็นจานสี ดังนั้นแต่ละค่าของเมทริกซ์จะถูกจับคู่กับจุดสีหนึ่งบนภาพสี่เหลี่ยม แถวและคอลัมน์ที่มีค่านี้จะกลายเป็นพิกัดของจุด เป็นผลให้เราได้ภาพที่ตัวอย่างเช่นความสูงของพื้นผิวถูกถ่ายทอดเป็นสี - เช่นเดียวกับบนแผนที่ทางภูมิศาสตร์ แต่บนแผนที่มักใช้สีเพียงไม่กี่สิบสีและในภาพของเรามีหลายร้อยสี เพื่อความสะดวกในการรับรู้ ควรส่งจุดที่ความสูงใกล้เคียงกันด้วยสีที่คล้ายคลึงกัน อาจปรากฎและตามกฎแล้วช่วงของค่าเริ่มต้นนั้นมากกว่าจำนวนสีที่เป็นไปได้ ในกรณีนี้ ข้อมูลสูญหาย และจำนวนสีที่เพิ่มขึ้นไม่ใช่ทางออก เนื่องจากความสามารถของสายตามนุษย์มีจำกัด จำเป็นต้องมีการประมวลผลข้อมูลเพิ่มเติม และการประมวลผลควรแตกต่างกันขึ้นอยู่กับงาน บางคนต้องการเห็นภาพรวม ในขณะที่บางคนต้องการดูรายละเอียด ใช้วิธีการต่าง ๆ สำหรับสิ่งนี้
6.3 การลบความชันคงที่
ภาพพื้นผิวที่ถ่ายด้วยกล้องจุลทรรศน์โพรบมักจะมีความลาดเอียงทั่วไป ซึ่งอาจเกิดจากสาเหตุหลายประการ ประการแรก ความชันอาจปรากฏขึ้นเนื่องจากการวางตำแหน่งตัวอย่างที่สัมพันธ์กับโพรบไม่ถูกต้อง ประการที่สอง มันสามารถเชื่อมโยงกับการเบี่ยงเบนของอุณหภูมิ ซึ่งนำไปสู่การกระจัดของโพรบที่สัมพันธ์กับตัวอย่าง ประการที่สาม อาจเป็นเพราะความไม่เป็นเชิงเส้นของการเคลื่อนที่แบบเพียโซสแกนเนอร์ พื้นที่ใช้งานจำนวนมากในเฟรม SPM ถูกใช้เพื่อแสดงการเอียง ดังนั้นรายละเอียดภาพขนาดเล็กจึงมองไม่เห็น เพื่อขจัดข้อเสียนี้ การดำเนินการลบความชันคงที่จะดำเนินการ เมื่อต้องการทำเช่นนี้ ในระยะแรก จะพบระนาบการประมาณโดยวิธีกำลังสองน้อยที่สุด
Р(х,y) ซึ่งมีความเบี่ยงเบนน้อยที่สุดจากภูมิประเทศพื้นผิว Z = f(x,y) จากนั้นระนาบนี้จะถูกลบออกจากภาพ SPM ควรทำการลบด้วยวิธีต่างๆ ขึ้นอยู่กับลักษณะของความชัน
หากความลาดเอียงในภาพ SPM เกิดจากการเอียงของตัวอย่างที่สัมพันธ์กับตัวอย่างโพรบ แนะนำให้หมุนระนาบด้วยมุมที่สอดคล้องกับมุมระหว่างเส้นตั้งฉากกับระนาบและแกน Z ในกรณีนี้ พิกัดของพื้นผิว Z = f(x,y) จะถูกแปลงตามการเปลี่ยนแปลงของการหมุนเชิงพื้นที่ อย่างไรก็ตาม ด้วยการเปลี่ยนแปลงนี้ เป็นไปได้ที่จะได้ภาพพื้นผิวในรูปแบบของฟังก์ชันหลายค่า Z = f(x, y) หากความชันเกิดจากการเคลื่อนตัวของความร้อน ขั้นตอนการลบความชันจะลดลงเป็นการลบ Z - พิกัดของระนาบจาก Z - พิกัดของภาพ SPM:
ผลลัพธ์ที่ได้คืออาร์เรย์ที่มีค่าช่วงน้อยกว่า และรายละเอียดเล็กๆ น้อยๆ ในภาพจะสะท้อนให้เห็นเป็นสีต่างๆ มากขึ้น และมองเห็นได้ชัดเจนขึ้น
6.4 การขจัดความผิดเพี้ยนที่เกี่ยวข้องกับเครื่องสแกนที่ไม่เหมาะ
ความไม่สมบูรณ์ของคุณสมบัติของสแกนเนอร์นำไปสู่ความจริงที่ว่าภาพ SPM มีการบิดเบือนที่เฉพาะเจาะจงจำนวนหนึ่ง เครื่องสแกนที่ไม่ตรงตามอุดมคติบางอย่าง เช่น การเคลื่อนไปข้างหน้าและถอยหลังที่ไม่สม่ำเสมอของเครื่องสแกน (ฮิสเทรีซิส) การคืบและการไม่เป็นเชิงเส้นของเพียโซเซรามิกส์ได้รับการชดเชยด้วยฮาร์ดแวร์และทางเลือกของโหมดการสแกนที่เหมาะสมที่สุด อย่างไรก็ตาม แม้จะมีสิ่งนี้ รูปภาพ SPM มีการบิดเบือนที่ยากต่อการกำจัดที่ระดับฮาร์ดแวร์ โดยเฉพาะอย่างยิ่ง เนื่องจากการเคลื่อนที่ของสแกนเนอร์ในระนาบของตัวอย่างส่งผลต่อตำแหน่งของโพรบเหนือพื้นผิว ภาพ SPM จึงเป็นการวางซ้อนของการบรรเทาที่แท้จริงและพื้นผิวบางส่วนของลำดับที่สอง (และมักจะสูงกว่า)
ในการขจัดความผิดเพี้ยนประเภทนี้ ใช้วิธีกำลังสองน้อยที่สุดเพื่อค้นหาพื้นผิวอันดับสองโดยประมาณ Р(x,y) ซึ่งมีความเบี่ยงเบนน้อยที่สุดจากฟังก์ชันดั้งเดิม Z = f(x,y) จากนั้นพื้นผิวนี้คือ ลบออกจากอิมเมจ SPM ดั้งเดิม:
การบิดเบือนอีกประเภทหนึ่งเกี่ยวข้องกับการเคลื่อนที่ของสแกนเนอร์ที่ไม่เป็นเชิงเส้นและไม่เป็นแนวฉากในระนาบ X, Y ซึ่งนำไปสู่การบิดเบือนสัดส่วนทางเรขาคณิตในส่วนต่างๆ ของภาพ SPM ของพื้นผิว เพื่อขจัดความผิดเพี้ยนดังกล่าว ขั้นตอนในการแก้ไขภาพ SPM จะดำเนินการโดยใช้ไฟล์ค่าสัมประสิทธิ์การแก้ไข ซึ่งสร้างขึ้นเมื่อสแกนโครงสร้างการทดสอบด้วยเครื่องสแกนเฉพาะที่เป็นที่รู้จัก
6.5 การกรองภาพ SPM
สัญญาณรบกวนของอุปกรณ์ (ส่วนใหญ่เป็นสัญญาณรบกวนของแอมพลิฟายเออร์อินพุตที่มีความไวสูง), ความไม่เสถียรของการสัมผัสของโพรบตัวอย่างระหว่างการสแกน, สัญญาณรบกวนจากภายนอกและการสั่นสะเทือนทำให้ภาพ SPM พร้อมด้วยข้อมูลที่เป็นประโยชน์ มีส่วนประกอบสัญญาณรบกวน ซอฟต์แวร์สามารถลบสัญญาณรบกวนของภาพ SPM บางส่วนได้
6.6 การกรองค่ามัธยฐาน
ผลลัพธ์ที่ดีในการขจัดสัญญาณรบกวนสุ่มความถี่สูงในเฟรม SPM ได้มาจากการกรองค่ามัธยฐาน นี่เป็นวิธีการประมวลผลภาพแบบไม่เชิงเส้น โดยสามารถอธิบายสาระสำคัญได้ดังนี้ หน้าต่างตัวกรองการทำงานถูกเลือกซึ่งประกอบด้วยจุด nxn (เพื่อความชัดเจน เราใช้หน้าต่าง 3 x 3 นั่นคือมี 9 จุด (รูปที่ 24))
ในกระบวนการกรอง หน้าต่างนี้จะย้ายข้ามเฟรมจากจุดหนึ่งไปยังอีกจุดหนึ่ง และดำเนินการตามขั้นตอนต่อไปนี้ ค่าแอมพลิจูดของรูปภาพ SPM ที่จุดของหน้าต่างนี้จะถูกจัดเรียงจากน้อยไปมาก และค่าที่อยู่ตรงกลางของแถวที่จัดเรียงจะอยู่ที่จุดกึ่งกลางของหน้าต่าง จากนั้นหน้าต่างจะเลื่อนไปยังจุดถัดไป และขั้นตอนการจัดเรียงซ้ำ ดังนั้น ค่าผิดปกติแบบสุ่มที่ทรงพลังและการลดลงในการจัดเรียงดังกล่าวจะจบลงที่ขอบของอาร์เรย์ที่จัดเรียงแล้ว และจะไม่รวมอยู่ในภาพสุดท้าย (ที่กรองแล้ว) ด้วยการประมวลผลนี้ พื้นที่ที่ไม่ผ่านการกรองจะยังคงอยู่ที่ขอบของเฟรม ซึ่งจะถูกละทิ้งในภาพสุดท้าย
6.7 วิธีการคืนค่าพื้นผิวจากอิมเมจ SPM
ข้อเสียประการหนึ่งที่มีอยู่ในวิธีการสแกนด้วยกล้องจุลทรรศน์โพรบทั้งหมดคือขนาดที่จำกัดของส่วนการทำงานของโพรบที่ใช้ สิ่งนี้นำไปสู่การเสื่อมสภาพอย่างมีนัยสำคัญในความละเอียดเชิงพื้นที่ของไมโครสโคปและการบิดเบือนที่สำคัญในภาพ SPM เมื่อสแกนพื้นผิวที่มีความผิดปกติของการบรรเทาเทียบได้กับขนาดลักษณะเฉพาะของส่วนการทำงานของโพรบ
อันที่จริง รูปภาพที่ได้รับใน SPM นั้นเป็น "การบิด" ของโพรบและพื้นผิวที่กำลังศึกษา กระบวนการ "การบิดตัว" ของรูปร่างโพรบที่มีการบรรเทาพื้นผิวนั้นแสดงให้เห็นในกรณีหนึ่งมิติในรูปที่ 25.
ในบางส่วน ปัญหานี้สามารถแก้ไขได้ด้วยวิธีการที่พัฒนาขึ้นเมื่อเร็วๆ นี้สำหรับการสร้างอิมเมจ SPM ใหม่ โดยอิงจากการประมวลผลข้อมูล SPM ของคอมพิวเตอร์ โดยคำนึงถึงรูปร่างเฉพาะของโพรบ วิธีที่มีประสิทธิภาพมากที่สุดของการสร้างพื้นผิวใหม่คือวิธีการดีคอนโวลูชันเชิงตัวเลข ซึ่งใช้รูปร่างของโพรบที่ได้จากการทดลองเมื่อทำการทดสอบการสแกนโครงสร้าง (ด้วยภูมิประเทศพื้นผิวที่เป็นที่รู้จัก)
ควรสังเกตว่าการบูรณะพื้นผิวตัวอย่างอย่างสมบูรณ์สามารถทำได้ก็ต่อเมื่อตรงตามเงื่อนไขสองประการ: หัววัดสัมผัสทุกจุดของพื้นผิวในระหว่างการสแกน และในแต่ละช่วงเวลา หัววัดสัมผัสเพียงจุดเดียวของพื้นผิว หากโพรบไม่สามารถเข้าถึงพื้นที่บางส่วนของพื้นผิวได้ในระหว่างการสแกน (เช่น หากตัวอย่างมีส่วนยื่นของส่วนนูน) จะมีการคืนค่าส่วนนูนเพียงบางส่วนเท่านั้น ยิ่งไปกว่านั้น ยิ่งจำนวนจุดพื้นผิวสัมผัสโดยโพรบระหว่างการสแกนมากเท่าใด สามารถสร้างพื้นผิวขึ้นใหม่ได้อย่างน่าเชื่อถือมากขึ้น
ในทางปฏิบัติ รูปภาพ SPM และรูปร่างที่กำหนดโดยการทดลองของโพรบเป็นอาร์เรย์สองมิติของค่าที่ไม่ต่อเนื่อง ซึ่งอนุพันธ์คือปริมาณที่กำหนดได้ไม่ดี ดังนั้น แทนที่จะคำนวณอนุพันธ์ของฟังก์ชันที่ไม่ต่อเนื่องในทางปฏิบัติ ในการดีคอนโวลูชันเชิงตัวเลขของภาพ SPM จะใช้เงื่อนไขของระยะห่างขั้นต่ำระหว่างโพรบกับพื้นผิวเมื่อสแกนด้วยความสูงเฉลี่ยคงที่
ในกรณีนี้ ความสูงของพื้นผิวนูนที่จุดที่กำหนดสามารถใช้เป็นระยะห่างขั้นต่ำระหว่างจุดโพรบกับจุดพื้นผิวที่สอดคล้องกันสำหรับตำแหน่งที่กำหนดของโพรบที่สัมพันธ์กับพื้นผิว ในความหมายทางกายภาพ เงื่อนไขนี้เทียบเท่ากับสภาวะความเท่าเทียมกันของอนุพันธ์ อย่างไรก็ตาม ช่วยให้ค้นหาจุดสัมผัสของโพรบกับพื้นผิวได้ด้วยวิธีที่เพียงพอมากขึ้น ซึ่งช่วยลดเวลาในการสร้างการบรรเทาทุกข์ลงอย่างมาก
ในการสอบเทียบและกำหนดรูปร่างของส่วนการทำงานของโพรบ จะใช้โครงสร้างการทดสอบพิเศษพร้อมพารามิเตอร์ที่ทราบของการบรรเทาพื้นผิว ประเภทของโครงสร้างการทดสอบที่พบบ่อยที่สุดและภาพลักษณะเฉพาะที่ได้จากกล้องจุลทรรศน์กำลังอะตอมแสดงในรูปที่ 26 และรูปที่ 27 .
ตารางมาตราส่วนที่มีหนามแหลมช่วยให้จัดตำแหน่งปลายหัววัดได้ดี ในขณะที่เส้นตารางสี่เหลี่ยมจะช่วยปรับรูปร่างพื้นผิวด้านข้าง การรวมผลลัพธ์ของการสแกนตะแกรงเหล่านี้ทำให้สามารถคืนค่ารูปร่างของส่วนการทำงานของโพรบได้อย่างสมบูรณ์
7. SPM สมัยใหม่
1) กล้องจุลทรรศน์โพรบสแกน SM-300
ออกแบบมาเพื่อศึกษาลักษณะทางสัณฐานวิทยาและโครงสร้างของพื้นที่รูพรุน SM-300 (รูปที่ 28) มีกล้องจุลทรรศน์ระบุตำแหน่งแบบออปติคัลในตัวซึ่งช่วยลดความจำเป็นในการค้นหาพื้นที่ที่น่าสนใจอย่างไม่รู้จบ ภาพแสงสีของตัวอย่างที่มีการเพิ่มขึ้นเล็กน้อยจะแสดงบนจอคอมพิวเตอร์ เป้าเล็งบนภาพออปติคัลสอดคล้องกับตำแหน่งของลำอิเล็กตรอน การใช้กากบาททำให้สามารถกำหนดตำแหน่งอย่างรวดเร็วเพื่อกำหนดพื้นที่ที่สนใจสำหรับการวิเคราะห์แรสเตอร์
ข้าว. 28. SPM SM-300 กล้องจุลทรรศน์อิเล็กตรอน หน่วยกำหนดตำแหน่งด้วยแสงมีคอมพิวเตอร์แยกต่างหาก ซึ่งช่วยให้มั่นใจว่าฮาร์ดแวร์เป็นอิสระจากกล้องจุลทรรศน์ในการสแกน
ความสามารถ SM-300
รับประกันความละเอียด 4 นาโนเมตร
กล้องจุลทรรศน์กำหนดตำแหน่งด้วยแสงเฉพาะ (อุปกรณ์เสริม)
· ซอฟต์แวร์ Windows® ที่ใช้งานง่าย
กล้องจุลทรรศน์สแกนและการถ่ายภาพที่ควบคุมด้วยคอมพิวเตอร์อย่างสมบูรณ์
เอาต์พุตทีวีมาตรฐานพร้อมการประมวลผลสัญญาณดิจิตอล
คอมพิวเตอร์ควบคุมระบบสูญญากาศต่ำ (ตัวเลือก)
การศึกษาทั้งหมดดำเนินการที่ตำแหน่งเดียวกันของแกนแอปพลิเคชัน (12 มม.)
Elemental X-ray microanalysis ในโหมดสุญญากาศต่ำและสูง (อุปกรณ์เสริม)
ความสามารถในการทำงานในสภาพแสงในห้องปกติ
การตรวจสอบตัวอย่างที่ไม่นำไฟฟ้าโดยไม่ได้เตรียมการเบื้องต้น
ความละเอียด 5.5 นาโนเมตรในโหมดสุญญากาศต่ำ
ซอฟต์แวร์ควบคุมการสลับโหมด
ช่วงสุญญากาศในห้องที่เลือกได้ 1.3 – 260 Pa
การแสดงภาพบนจอคอมพิวเตอร์
เซ็นเซอร์ Robinson แบบกระจายตัว V แบบอนุกรม
2) กล้องจุลทรรศน์โพรบสแกนความละเอียดสูง Supra50VP พร้อมระบบวิเคราะห์ไมโคร INCA Energy+Oxford
อุปกรณ์ (รูปที่ 29) มีไว้สำหรับการวิจัยในทุกสาขาของวัสดุศาสตร์ ในสาขานาโนและเทคโนโลยีชีวภาพ เครื่องมือนี้รองรับตัวอย่างขนาดใหญ่ และยังรองรับการทำงานของแรงดันผันแปรสำหรับการทดสอบตัวอย่างที่ไม่นำไฟฟ้าโดยไม่ต้องเตรียมการ ข้าว. 29. SPM Supra50VP
พารามิเตอร์:
แรงดันไฟเร่ง 100 V - 30 kV (แคโทดการปล่อยสนาม)
แม็กซ์ กำลังขยายสูงสุด x 90000
ความละเอียดสูงพิเศษ - สูงถึง 1 นาโนเมตร (ที่ 20 kV)
โหมดสุญญากาศพร้อมแรงดันแปรผันตั้งแต่ 2 ถึง 133 Pa
แรงดันไฟเร่ง - ตั้งแต่ 0.1 ถึง 30 kV
เวทีเครื่องยนต์ที่มีห้าองศาอิสระ
ความละเอียดเครื่องตรวจจับ EDX 129 eV บนสาย Ka(Mn) อัตราการนับสูงถึง 100,000 พัลส์/วินาที
3) LEO SUPRA 25 กล้องจุลทรรศน์ที่ทันสมัยพร้อมคอลัมน์ "GEMINI" และการปล่อยภาคสนาม (รูปที่ 30)
– ออกแบบมาสำหรับการวิจัยระดับนาโน
– สามารถเชื่อมต่อกับทั้งระบบ EDX และ WDX สำหรับการวิเคราะห์ระดับไมโคร
– ความละเอียด 1.5 nm ที่ 20 kV, 2 nm ที่ 1 kV
บทสรุป
ในช่วงหลายปีที่ผ่านมา การใช้กล้องจุลทรรศน์โพรบทำให้สามารถบรรลุผลทางวิทยาศาสตร์อันโดดเด่นในด้านต่างๆ ของฟิสิกส์ เคมี และชีววิทยา
หากกล้องจุลทรรศน์โพรบสแกนตัวแรกเป็นตัวบ่งชี้สำหรับการวิจัยเชิงคุณภาพ แสดงว่ากล้องจุลทรรศน์โพรบสแกนสมัยใหม่เป็นอุปกรณ์ที่รวมวิธีการวิจัยที่แตกต่างกันถึง 50 วิธี สามารถดำเนินการ displacements ที่ระบุในระบบตัวอย่างโพรบที่มีความแม่นยำ 0.1% คำนวณฟอร์มแฟคเตอร์ของโพรบ ทำการวัดที่แม่นยำของขนาดที่ใหญ่เพียงพอ (สูงสุด 200 µm ในระนาบการสแกน และความสูง 15-20 µm ) และในขณะเดียวกันก็ให้ความละเอียดระดับโมเลกุลย่อย
กล้องจุลทรรศน์โพรบสแกนได้กลายเป็นหนึ่งในเครื่องมือประเภทที่ต้องการมากที่สุดสำหรับการวิจัยทางวิทยาศาสตร์ในตลาดโลก มีการสร้างการออกแบบเครื่องมือใหม่อย่างต่อเนื่อง เฉพาะสำหรับการใช้งานที่หลากหลาย
การพัฒนานาโนเทคโนโลยีแบบไดนามิกนั้นต้องการการขยายขีดความสามารถของเทคโนโลยีการวิจัยมากขึ้นเรื่อยๆ บริษัทไฮเทคทั่วโลกกำลังทำงานเพื่อสร้างงานวิจัยและเทคโนโลยีนาโนคอมเพล็กซ์ที่รวมกลุ่มวิธีการวิเคราะห์ทั้งหมดเข้าด้วยกัน เช่น Raman spectroscopy, luminescence spectroscopy, X-ray spectroscopy สำหรับการวิเคราะห์องค์ประกอบ, กล้องจุลทรรศน์แบบออปติคัลความละเอียดสูง, กล้องจุลทรรศน์อิเล็กตรอน ลำแสงไอออนที่เน้น ระบบได้รับความสามารถทางปัญญาอันทรงพลัง: ความสามารถในการจดจำและจำแนกภาพ เน้นความแตกต่างที่จำเป็น มีความสามารถในการสร้างแบบจำลองผลลัพธ์ และพลังในการคำนวณมาจากการใช้ซูเปอร์คอมพิวเตอร์
เทคนิคที่พัฒนาแล้วมีความเป็นไปได้สูง แต่เป้าหมายสูงสุดของการใช้เทคนิคนี้คือเพื่อให้ได้ผลลัพธ์ทางวิทยาศาสตร์ การเรียนรู้ความสามารถของเทคนิคนี้เป็นงานที่มีความซับซ้อนสูง โดยต้องได้รับการฝึกอบรมจากผู้เชี่ยวชาญที่มีคุณสมบัติสูงซึ่งสามารถใช้อุปกรณ์และระบบเหล่านี้ได้อย่างมีประสิทธิภาพ
บรรณานุกรม
1. Nevolin V. K. พื้นฐานของเทคโนโลยีโพรบอุโมงค์ / V. K. Nevolin, - M.: Nauka, 1996, - 91 p.
2. Kulakov Yu. A. กล้องจุลทรรศน์อิเล็กตรอน / Yu. A. Kulakov, - M .: ความรู้, 1981, - 64 p
3. Volodin A.P. การสแกนด้วยกล้องจุลทรรศน์ / A. P. Volodin, - M.: Nauka, 1998, - 114 p.
4. การสแกนด้วยกล้องจุลทรรศน์โพรบของไบโอโพลีเมอร์ / แก้ไขโดย I. V. Yaminsky, - M .: Nauchny Mir, 1997, - 86 p.
5. Mironov V. พื้นฐานของการสแกนด้วยกล้องจุลทรรศน์โพรบ / V. Mironov, - M .: Technosfera, 2004, - 143 p.
6. Rykov S. A. การสแกนกล้องจุลทรรศน์โพรบของวัสดุเซมิคอนดักเตอร์ / S. A. Rykov, เซนต์ปีเตอร์สเบิร์ก: Nauka, 2001, 53 p.
7. Bykov V. A. , Lazarev M. I. การสแกนกล้องจุลทรรศน์โพรบสำหรับวิทยาศาสตร์และอุตสาหกรรม / V. A. Bykov, M. I. Lazarev // อิเล็กทรอนิกส์: วิทยาศาสตร์ เทคโนโลยี ธุรกิจ - 1997 - ลำดับ 5 - ด้วย 7 - 14.
7. การใช้กล้องจุลทรรศน์โพรบสแกนเพื่อศึกษาวัตถุชีวภาพ
7. การใช้กล้องจุลทรรศน์โพรบสแกนเพื่อศึกษาวัตถุชีวภาพ 1
7.1. เป้าหมายการทำงาน2
7.2. ข้อมูลสำหรับอาจารย์ 3
7.4. แนวปฏิบัติ 31
7.5. ความปลอดภัย 32
7.6. งาน 32
7.7. คำถามเพื่อความปลอดภัย 32
7.8. วรรณกรรม 32
งานห้องปฏิบัติการได้รับการพัฒนาโดยมหาวิทยาลัยแห่งรัฐ Nizhny Novgorod เอ็น.ไอ. Lobachevsky
7.1. เป้าหมายของงาน
การศึกษาพารามิเตอร์ทางสัณฐานวิทยาของโครงสร้างทางชีววิทยาเป็นภารกิจที่สำคัญสำหรับนักชีววิทยา เนื่องจากขนาดและรูปร่างของโครงสร้างบางส่วนเป็นตัวกำหนดคุณสมบัติทางสรีรวิทยาของพวกมันเป็นส่วนใหญ่ การเปรียบเทียบข้อมูลทางสัณฐานวิทยากับลักษณะการทำงาน สามารถรับข้อมูลที่สมบูรณ์เกี่ยวกับการมีส่วนร่วมของเซลล์ที่มีชีวิตในการรักษาสมดุลทางสรีรวิทยาของร่างกายมนุษย์หรือสัตว์
ก่อนหน้านี้ นักชีววิทยาและแพทย์มีโอกาสศึกษาการเตรียมการด้วยกล้องจุลทรรศน์แบบออปติคัลและอิเล็กตรอนเท่านั้น การศึกษาเหล่านี้ให้ภาพบางส่วนเกี่ยวกับสัณฐานวิทยาของเซลล์ที่ตรึงอยู่กับที่ การย้อม และการเคลือบโลหะบาง ๆ ที่ได้จากการสปัตเตอร์ ไม่สามารถศึกษาสัณฐานวิทยาของวัตถุที่มีชีวิตได้ การเปลี่ยนแปลงภายใต้อิทธิพลของปัจจัยต่างๆ แต่น่าดึงดูดใจมาก
กล้องจุลทรรศน์โพรบสแกน (SPM) ได้เปิดโอกาสใหม่ในการศึกษาเซลล์ แบคทีเรีย โมเลกุลทางชีววิทยา และ DNA ภายใต้สภาวะที่ใกล้เคียงที่สุดกับเซลล์ต้นกำเนิด SPM ช่วยให้คุณศึกษาวัตถุทางชีววิทยาโดยไม่ต้องใช้สารตรึงและสีย้อมพิเศษ ในอากาศ หรือแม้แต่ในตัวกลางที่เป็นของเหลว
ปัจจุบัน SPM ถูกใช้ในหลากหลายสาขาวิชา ทั้งในการวิจัยทางวิทยาศาสตร์ขั้นพื้นฐานและในการพัฒนาเทคโนโลยีชั้นสูงประยุกต์ สถาบันวิจัยหลายแห่งของประเทศมีอุปกรณ์ไมโครสโคปแบบโพรบ ในเรื่องนี้ความต้องการผู้เชี่ยวชาญที่มีคุณวุฒิเพิ่มขึ้นอย่างต่อเนื่อง เพื่อให้เป็นไปตามข้อกำหนดนี้ NT-MDT (เซเลโนกราด รัสเซีย) ได้พัฒนาห้องปฏิบัติการทางการศึกษาและวิทยาศาสตร์เฉพาะทางสำหรับกล้องจุลทรรศน์โพรบสแกน NanoEducator.
SPM NanoEducatorออกแบบมาเป็นพิเศษสำหรับนักเรียนในการทำงานห้องปฏิบัติการ อุปกรณ์นี้มุ่งเป้าไปที่ผู้ชมที่เป็นนักเรียน: มันถูกควบคุมโดยคอมพิวเตอร์อย่างสมบูรณ์ มีอินเทอร์เฟซที่เรียบง่ายและใช้งานง่าย รองรับแอนิเมชั่น เกี่ยวข้องกับการพัฒนาเทคนิคทีละน้อย ไม่มีการตั้งค่าที่ซับซ้อนและวัสดุสิ้นเปลืองราคาไม่แพง
ในห้องปฏิบัติการนี้ คุณจะได้เรียนรู้เกี่ยวกับการสแกนด้วยกล้องจุลทรรศน์โพรบ ทำความคุ้นเคยกับพื้นฐาน ศึกษาการออกแบบและหลักการของการศึกษา SPM NanoEducatorเรียนรู้วิธีการเตรียมการเตรียมทางชีวภาพสำหรับการวิจัย รับภาพ SPM แรกของแบคทีเรียกรดแลคติกที่ซับซ้อน และเรียนรู้พื้นฐานของการประมวลผลและนำเสนอผลการวัด
7.2 ข้อมูลสำหรับอาจารย์ 1
งานห้องปฏิบัติการดำเนินการในหลายขั้นตอน:
1. การเตรียมตัวอย่างทำโดยนักเรียนแต่ละคนเป็นรายบุคคล
2. การรับภาพแรกจะดำเนินการในอุปกรณ์เครื่องเดียวภายใต้การดูแลของครู จากนั้นนักเรียนแต่ละคนจะตรวจสอบตัวอย่างของตนเองอย่างอิสระ
3. การประมวลผลข้อมูลการทดลองโดยนักเรียนแต่ละคนจะดำเนินการเป็นรายบุคคล
ตัวอย่างสำหรับการวิจัย: แบคทีเรียกรดแลคติกบนใบปะหน้า
ก่อนเริ่มงาน จำเป็นต้องเลือกโพรบที่มีลักษณะแอมพลิจูด-ความถี่ที่มีลักษณะเฉพาะมากที่สุด (สมมาตรสูงสุดเดียว) เพื่อให้ได้ภาพพื้นผิวของตัวอย่างที่ศึกษา
รายงานห้องปฏิบัติการควรรวมถึง:
1. ส่วนทฤษฎี (คำตอบสำหรับคำถามควบคุม)
2. ผลลัพธ์ของส่วนทดลอง (คำอธิบายของงานวิจัย ผลลัพธ์ที่ได้ และข้อสรุปที่วาด)
1. วิธีการศึกษาสัณฐานวิทยาของวัตถุทางชีววิทยา
2. สแกนกล้องจุลทรรศน์โพรบ:
การออกแบบ SPM;
ความหลากหลายของ SPM: STM, AFM;
รูปแบบข้อมูล SPM การสร้างภาพข้อมูล SPM
3. การเตรียมตัวอย่างสำหรับการศึกษา SPM:
สัณฐานวิทยาและโครงสร้างของเซลล์แบคทีเรีย
การเตรียมการเพื่อศึกษาสัณฐานวิทยาโดยใช้ SPM
4. ทำความคุ้นเคยกับโปรแกรมออกแบบและควบคุมของ SPM NanoEducator
5. การรับภาพ SPM
6. การประมวลผลและวิเคราะห์ภาพที่ได้รับ การกำหนดลักษณะเชิงปริมาณของภาพ SPM
วิธีการศึกษาสัณฐานวิทยาของวัตถุทางชีววิทยา
เส้นผ่านศูนย์กลางลักษณะเฉพาะของเซลล์คือ 10 20 µm แบคทีเรีย - จาก 0.5 ถึง 3 5 µm ค่าเหล่านี้มีขนาดเล็กกว่าอนุภาคที่เล็กที่สุดที่มองเห็นได้ด้วยตาเปล่า 5 เท่า ดังนั้นการศึกษาเซลล์ครั้งแรกจึงเกิดขึ้นได้หลังจากการถือกำเนิดของกล้องจุลทรรศน์แบบใช้แสงเท่านั้น ในตอนท้ายของศตวรรษที่ XVII Antonio van Leeuwenhoek สร้างกล้องจุลทรรศน์แบบใช้แสงเครื่องแรก ก่อนหน้านั้นผู้คนไม่ได้สงสัยว่ามีจุลินทรีย์และแบคทีเรียที่ทำให้เกิดโรค [Ref. 7 -1].
กล้องจุลทรรศน์ออปติคอล
ความยากลำบากในการศึกษาเซลล์เกิดจากการที่ไม่มีสีและโปร่งใส ดังนั้นการค้นพบโครงสร้างพื้นฐานของพวกมันจึงเกิดขึ้นหลังจากการนำสีย้อมไปใช้จริงเท่านั้น สีย้อมให้ความคมชัดของภาพที่เพียงพอ การใช้กล้องจุลทรรศน์แบบใช้แสงช่วยให้แยกแยะวัตถุที่มีระยะห่าง 0.2 µm ออกจากกันได้ กล่าวคือ วัตถุที่เล็กที่สุดที่ยังแยกแยะได้ด้วยกล้องจุลทรรศน์แบบใช้แสงคือแบคทีเรียและไมโตคอนเดรีย รูปภาพขององค์ประกอบเซลล์ที่มีขนาดเล็กกว่าจะบิดเบี้ยวโดยผลกระทบที่เกิดจากธรรมชาติของคลื่นของแสง
เพื่อเตรียมการเตรียมการที่ยาวนาน เซลล์จะได้รับการบำบัดด้วยสารตรึงเพื่อตรึงและรักษาไว้ นอกจากนี้การตรึงยังช่วยเพิ่มการเข้าถึงเซลล์ให้กับสีย้อมเพราะ โมเลกุลของเซลล์ถูกยึดเข้าด้วยกันโดยการเชื่อมขวาง ซึ่งทำให้เสถียรและแก้ไขพวกมันในตำแหน่งที่แน่นอน ส่วนใหญ่แล้ว อัลดีไฮด์และแอลกอฮอล์ทำหน้าที่เป็นสารตรึง (เช่น กลูตาราลดีไฮด์หรือฟอร์มัลดีไฮด์สร้างพันธะโควาเลนต์กับกลุ่มโปรตีนอิสระและโมเลกุลที่อยู่ใกล้เคียงเชื่อมขวาง) หลังจากการตรึง เนื้อเยื่อมักจะถูกตัดด้วยไมโครโทมเป็นส่วนที่บางมาก (หนา 1 ถึง 10 ไมโครเมตร) แล้ววางบนสไลด์แก้ว ด้วยวิธีการเตรียมนี้ โครงสร้างของเซลล์หรือโมเลกุลขนาดใหญ่สามารถเสียหายได้ ดังนั้นการแช่แข็งแบบแฟลชจึงเป็นวิธีที่แนะนำ เนื้อเยื่อแช่แข็งถูกตัดด้วยไมโครโทมที่วางอยู่ในห้องเย็น หลังจากแยกส่วนแล้วเซลล์จะถูกย้อม โดยทั่วไปจะใช้สีย้อมอินทรีย์เพื่อจุดประสงค์นี้ (สีเขียวมาลาไคต์ สีดำซูดาน ฯลฯ) แต่ละตัวมีลักษณะเฉพาะด้วยความสัมพันธ์บางอย่างกับส่วนประกอบของเซลล์ เช่น hematoxylin มีความสัมพันธ์กับโมเลกุลที่มีประจุลบ ดังนั้นจึงทำให้สามารถตรวจจับ DNA ในเซลล์ได้ หากมีโมเลกุลหนึ่งหรือโมเลกุลอื่นอยู่ในเซลล์ในปริมาณเล็กน้อย การใช้กล้องจุลทรรศน์เรืองแสงจะสะดวกที่สุด
กล้องจุลทรรศน์เรืองแสง
สีย้อมเรืองแสงดูดซับแสงที่มีความยาวคลื่นหนึ่งและปล่อยแสงจากอีกความยาวคลื่นที่ยาวกว่า หากสารดังกล่าวถูกฉายรังสีด้วยแสงที่มีความยาวคลื่นตรงกับความยาวคลื่นของแสงที่สีย้อมดูดกลืน จากนั้นจึงใช้ตัวกรองสำหรับการวิเคราะห์ที่ส่งแสงที่มีความยาวคลื่นที่สอดคล้องกับแสงที่ปล่อยออกมาจากสีย้อม โมเลกุลเรืองแสงสามารถเป็นได้ ตรวจพบโดยเรืองแสงในสนามมืด ความเข้มสูงของแสงที่ปล่อยออกมาเป็นคุณลักษณะเฉพาะของโมเลกุลดังกล่าว การใช้สีย้อมเรืองแสงสำหรับการย้อมสีเซลล์เกี่ยวข้องกับการใช้กล้องจุลทรรศน์ฟลูออเรสเซนต์ชนิดพิเศษ ไมโครสโคปดังกล่าวมีลักษณะคล้ายกับเลนส์ออปติคัลทั่วไป แต่แสงจากไฟส่องสว่างอันทรงพลังจะลอดผ่านฟิลเตอร์สองชุด ชุดแรกเพื่อหยุดรังสีบางส่วน หน้าตัวอย่างและอื่น ๆ เพื่อกรองแสงที่ได้รับจากตัวอย่าง ฟิลเตอร์แรกถูกเลือกในลักษณะที่ส่งผ่านเฉพาะแสงของความยาวคลื่นที่กระตุ้นสีย้อมเรืองแสงโดยเฉพาะ ในเวลาเดียวกัน ตัวกรองที่สองจะปิดกั้นแสงที่ตกกระทบนี้ และยอมให้แสงของความยาวคลื่นที่ปล่อยออกมาจากสีย้อมเมื่อเรืองแสง
กล้องจุลทรรศน์เรืองแสงมักใช้เพื่อระบุโปรตีนจำเพาะหรือโมเลกุลอื่นๆ ที่กลายเป็นหลอดฟลูออเรสเซนต์หลังจากถูกจับกับสีย้อมเรืองแสงแบบโควาเลนต์ เพื่อจุดประสงค์นี้มักใช้สีย้อมสองสี - ฟลูออเรสซีน,ซึ่งให้แสงเรืองแสงสีเขียวอมเหลืองเข้มหลังจากกระตุ้นด้วยแสงสีฟ้าอ่อน และ โรดามีน,ทำให้เกิดการเรืองแสงสีแดงเข้มหลังจากกระตุ้นด้วยแสงสีเหลืองสีเขียว โดยการใช้ทั้งฟลูออเรสซีนและโรดามีนในการย้อมสี สามารถรับการกระจายของโมเลกุลต่างๆ ได้
กล้องจุลทรรศน์สนามมืด
วิธีที่ง่ายที่สุดในการดูรายละเอียดโครงสร้างเซลล์คือการสังเกตแสงที่กระจัดกระจายตามส่วนประกอบต่างๆ ของเซลล์ ในกล้องจุลทรรศน์แบบสนามมืด รังสีจากเครื่องให้แสงสว่างจะถูกนำจากด้านข้าง และมีเพียงรังสีที่กระจัดกระจายเท่านั้นที่เข้าสู่วัตถุประสงค์ของกล้องจุลทรรศน์ ดังนั้น เซลล์จึงดูเหมือนวัตถุเรืองแสงในที่มืด ข้อดีหลักประการหนึ่งของกล้องจุลทรรศน์สนามมืดคือความสามารถในการสังเกตการเคลื่อนไหวของเซลล์ในระหว่างการแบ่งตัวและการย้ายถิ่น การเคลื่อนไหวของเซลลูลาร์มักจะช้ามากและสังเกตได้ยากในแบบเรียลไทม์ ในกรณีนี้ ไมโครฟิล์มแบบเฟรมต่อเฟรม (ไทม์แลปส์) หรือการบันทึกวิดีโอจะถูกใช้ ในกรณีนี้ เฟรมที่ต่อเนื่องกันจะถูกคั่นด้วยเวลา แต่เมื่อเล่นการบันทึกด้วยความเร็วปกติ ภาพของเหตุการณ์จริงจะเร่งขึ้น
ในช่วงไม่กี่ปีที่ผ่านมา กล้องวิดีโอและเทคโนโลยีการถ่ายภาพที่เกี่ยวข้องได้เพิ่มขีดความสามารถของกล้องจุลทรรศน์แบบออปติคัลอย่างมาก ต้องขอบคุณแอปพลิเคชันเหล่านี้จึงสามารถเอาชนะปัญหาที่เกิดจากลักษณะเฉพาะของสรีรวิทยาของมนุษย์ได้ พวกเขาคือ:
1. ภายใต้สภาวะปกติ ดวงตาจะไม่รับรู้แสงที่อ่อนมาก
2. ตาไม่สามารถตรวจจับความแตกต่างเล็กน้อยในความเข้มของแสงกับพื้นหลังที่สว่างได้
ปัญหาแรกเหล่านี้เอาชนะได้ด้วยการติดตั้งกล้องวิดีโอความไวสูงพิเศษเข้ากับกล้องจุลทรรศน์ ทำให้สามารถสังเกตเซลล์ได้เป็นเวลานานโดยใช้แสงน้อย โดยไม่รวมถึงการเปิดรับแสงจ้าเป็นเวลานาน ระบบการถ่ายภาพมีความสำคัญอย่างยิ่งสำหรับการศึกษาโมเลกุลเรืองแสงในเซลล์ที่มีชีวิต เนื่องจากภาพดังกล่าวผลิตโดยกล้องวิดีโอในรูปแบบของสัญญาณอิเล็กทรอนิกส์ จึงสามารถแปลงเป็นสัญญาณตัวเลขได้อย่างเหมาะสม ส่งไปยังคอมพิวเตอร์ จากนั้นจึงประมวลผลเพิ่มเติมเพื่อดึงข้อมูลที่ซ่อนอยู่
ความคมชัดสูงที่ทำได้ด้วยกล้องจุลทรรศน์การรบกวนของคอมพิวเตอร์ทำให้สามารถสังเกตวัตถุขนาดเล็กมากได้ เช่น ไมโครทูบูลแต่ละตัว ซึ่งมีเส้นผ่านศูนย์กลางน้อยกว่าหนึ่งในสิบของความยาวคลื่นของแสง (0.025 µm) ไมโครทูบูลแต่ละตัวสามารถเห็นได้โดยใช้กล้องจุลทรรศน์เรืองแสง อย่างไรก็ตาม ในทั้งสองกรณี เอฟเฟกต์การเลี้ยวเบนจะหลีกเลี่ยงไม่ได้ ซึ่งจะทำให้ภาพเปลี่ยนไปอย่างมาก ในกรณีนี้ เส้นผ่านศูนย์กลางของไมโครทูบูลจะถูกประเมินสูงเกินไป (0.2 ไมโครเมตร) ซึ่งทำให้ไม่สามารถแยกแยะไมโครทูบูลแต่ละตัวออกจากมัดของไมโครทูบูลหลายตัวได้ ในการแก้ปัญหานี้ จำเป็นต้องใช้กล้องจุลทรรศน์อิเล็กตรอน ซึ่งขีดจำกัดความละเอียดจะเลื่อนไปไกลกว่าความยาวคลื่นของแสงที่มองเห็นได้
กล้องจุลทรรศน์อิเล็กตรอน
ความสัมพันธ์ระหว่างความยาวคลื่นและขีดจำกัดความละเอียดยังคงไว้สำหรับอิเล็กตรอน อย่างไรก็ตาม สำหรับกล้องจุลทรรศน์อิเล็กตรอน ขีดจำกัดความละเอียดจะต่ำกว่าขีดจำกัดการเลี้ยวเบนมาก ความยาวคลื่นของอิเล็กตรอนลดลงเมื่อความเร็วเพิ่มขึ้น ในกล้องจุลทรรศน์อิเล็กตรอนที่มีแรงดันไฟฟ้า 100,000 V ความยาวคลื่นของอิเล็กตรอนคือ 0.004 นาโนเมตร ตามทฤษฎีแล้ว ความละเอียดของกล้องจุลทรรศน์ดังกล่าวอยู่ที่ 0.002 นาโนเมตร อย่างไรก็ตาม ในความเป็นจริง เนื่องจากรูรับแสงที่เป็นตัวเลขขนาดเล็กของเลนส์อิเล็กตรอน ความละเอียดของกล้องจุลทรรศน์อิเล็กตรอนสมัยใหม่จึงอยู่ที่ 0.1 นาโนเมตรดีที่สุด ความยากลำบากในการเตรียมตัวอย่างและความเสียหายจากการแผ่รังสีทำให้ความละเอียดปกติลดลงอย่างมาก ซึ่งสำหรับวัตถุทางชีววิทยาจะอยู่ที่ 2 นาโนเมตร (สูงกว่ากล้องจุลทรรศน์แบบใช้แสงประมาณ 100 เท่า)
แหล่งที่มาของอิเล็กตรอนใน กล้องจุลทรรศน์อิเล็กตรอนแบบส่องผ่าน (TEM)เป็นแคโทดฟิลาเมนต์อยู่ที่ส่วนบนของเสาทรงกระบอกสูงประมาณสองเมตร เพื่อหลีกเลี่ยงการกระเจิงของอิเล็กตรอนในระหว่างการชนกับโมเลกุลของอากาศ สูญญากาศจะถูกสร้างขึ้นในคอลัมน์ อิเล็กตรอนที่ปล่อยออกมาจากไส้หลอดแคโทดจะถูกเร่งโดยขั้วบวกที่อยู่ใกล้เคียงและเข้าไปในรูเล็กๆ ทำให้เกิดลำอิเล็กตรอนที่ผ่านเข้าไปด้านล่างของคอลัมน์ ตามแนวเสาในระยะหนึ่งมีแม่เหล็กวงแหวนที่โฟกัสลำแสงอิเล็กตรอน เช่น เลนส์แก้วที่โฟกัสลำแสงในกล้องจุลทรรศน์แบบออปติคัล ตัวอย่างจะถูกวางผ่านล็อคอากาศภายในคอลัมน์ ในเส้นทางของลำอิเล็กตรอน ส่วนหนึ่งของอิเล็กตรอนในขณะที่ผ่านตัวอย่างจะกระจัดกระจายตามความหนาแน่นของสารในบริเวณนี้ อิเล็กตรอนที่เหลือจะถูกโฟกัสและสร้างภาพ (คล้ายกับการก่อตัวของภาพในกล้องจุลทรรศน์แบบใช้แสง) บนจานถ่ายภาพหรือบนจอเรืองแสง
ข้อเสียที่ใหญ่ที่สุดประการหนึ่งของกล้องจุลทรรศน์อิเล็กตรอนคือตัวอย่างทางชีววิทยาต้องได้รับการประมวลผลพิเศษ ขั้นแรกให้แก้ไขด้วยกลูตาราลดีไฮด์ก่อนแล้วจึงใช้กรดออสมิกซึ่งผูกมัดและรักษาเสถียรภาพของไขมันและโปรตีนสองชั้น ประการที่สอง อิเล็กตรอนมีกำลังการแทรกซึมต่ำ ดังนั้นคุณต้องสร้างส่วนที่บางเฉียบ และด้วยเหตุนี้ ตัวอย่างจึงถูกทำให้แห้งและเคลือบด้วยเรซิน ประการที่สาม เพื่อเพิ่มคอนทราสต์ ตัวอย่างจะได้รับการบำบัดด้วยเกลือของโลหะหนัก เช่น ออสเมียม ยูเรเนียม และตะกั่ว
เพื่อให้ได้ภาพสามมิติของพื้นผิวที่ใช้ กล้องจุลทรรศน์อิเล็กตรอนแบบส่องกราด (SEM)ซึ่งใช้อิเล็กตรอนที่กระจัดกระจายหรือปล่อยออกมาจากพื้นผิวของตัวอย่าง ตัวอย่างในกรณีนี้ได้รับการแก้ไข ตากให้แห้ง และหุ้มด้วยฟิล์มโลหะหนักบางๆ จากนั้นจึงสแกนด้วยลำอิเล็กตรอนแคบ ในกรณีนี้ จะประมาณจำนวนอิเล็กตรอนที่กระจัดกระจายระหว่างการฉายรังสีที่พื้นผิว ค่าที่ได้รับใช้เพื่อควบคุมความเข้มของลำแสงที่สอง โดยเคลื่อนที่พร้อมกันกับลำแสงแรกและสร้างภาพบนหน้าจอมอนิเตอร์ ความละเอียดของวิธีการคือประมาณ 10 นาโนเมตร และไม่สามารถใช้ได้กับการศึกษาออร์แกเนลล์ภายในเซลล์ ความหนาของตัวอย่างที่ศึกษาด้วยวิธีนี้พิจารณาจากกำลังการทะลุทะลวงของอิเล็กตรอนหรือพลังงานของอิเล็กตรอน
ข้อเสียหลักและที่สำคัญของวิธีการทั้งหมดนี้คือระยะเวลา ความซับซ้อน และค่าใช้จ่ายในการเตรียมตัวอย่างที่สูง
การสแกนด้วยกล้องจุลทรรศน์โพรบ
ในกล้องจุลทรรศน์โพรบสแกน (SPM) แทนที่จะใช้ลำแสงอิเล็กตรอนหรือการแผ่รังสีด้วยแสง โพรบปลายแหลมหรือเข็มจะถูกนำมาใช้เพื่อสแกนพื้นผิวของตัวอย่าง พูดเปรียบเปรย เราสามารถพูดได้ว่าถ้าตัวอย่างถูกตรวจสอบในกล้องจุลทรรศน์แบบออปติคัลหรืออิเล็กตรอน ก็จะรู้สึกได้ใน SPM เป็นผลให้สามารถรับภาพสามมิติของวัตถุในสื่อต่างๆ: สูญญากาศ, อากาศ, ของเหลว
การออกแบบพิเศษของ SPM ที่ดัดแปลงสำหรับการวิจัยทางชีววิทยาทำให้สามารถสแกนเซลล์ที่มีชีวิตทั้งสองในตัวกลางที่เป็นของเหลวและการเตรียมการคงที่ในอากาศพร้อมกันได้ด้วยการสังเกตด้วยแสง
กล้องจุลทรรศน์โพรบสแกน
ชื่อของกล้องจุลทรรศน์โพรบสแกนสะท้อนถึงหลักการของการทำงาน - การสแกนพื้นผิวของตัวอย่างซึ่งจะทำการอ่านระดับการโต้ตอบระหว่างโพรบกับพื้นผิวแบบจุดต่อจุด สามารถกำหนดขนาดของพื้นที่สแกนและจำนวนจุดในนั้นได้ N X N Y ยิ่งคุณระบุจุดมาก ความละเอียดของภาพพื้นผิวก็จะยิ่งสูงขึ้น ระยะห่างระหว่างจุดอ่านสัญญาณเรียกว่าขั้นตอนการสแกน ขั้นตอนการสแกนควรน้อยกว่ารายละเอียดพื้นผิวที่ศึกษา การเคลื่อนที่ของโพรบระหว่างการสแกน (ดูรูปที่ 7-1) จะดำเนินการเชิงเส้นในทิศทางไปข้างหน้าและย้อนกลับ (ในทิศทางของการสแกนอย่างรวดเร็ว) การเปลี่ยนไปยังบรรทัดถัดไปจะดำเนินการในแนวตั้งฉาก (ใน ทิศทางการสแกนช้า)
ข้าว. 7 1. การแสดงแผนผังของกระบวนการสแกน
(การอ่านสัญญาณจะดำเนินการโดยตรงของเครื่องสแกน)
ไมโครสโคปสำหรับสแกนมีชื่อและวัตถุประสงค์ต่างกัน ทั้งนี้ขึ้นอยู่กับลักษณะของสัญญาณการอ่าน:
กล้องจุลทรรศน์กำลังอะตอม (AFM) อ่านแรงของปฏิกิริยาระหว่างอะตอมระหว่างอะตอมของโพรบกับอะตอมของตัวอย่าง
กล้องจุลทรรศน์แบบอุโมงค์ (STM) การอ่านกระแสของอุโมงค์ที่ไหลระหว่างตัวอย่างที่เป็นสื่อกระแสไฟฟ้ากับโพรบที่เป็นสื่อกระแสไฟฟ้า
กล้องจุลทรรศน์กำลังแม่เหล็ก (MFM) อ่านค่าแรงของปฏิกิริยาระหว่างโพรบที่เคลือบด้วยวัสดุแม่เหล็กและตัวอย่างที่ตรวจจับคุณสมบัติของแม่เหล็ก
กล้องจุลทรรศน์แรงไฟฟ้าสถิต (ESM) ช่วยให้ได้ภาพการกระจายศักย์ไฟฟ้าบนพื้นผิวตัวอย่าง ใช้โพรบซึ่งส่วนปลายหุ้มด้วยฟิล์มนำไฟฟ้าบาง ๆ (ทองหรือแพลตตินั่ม)
การออกแบบ SPM
SPM ประกอบด้วยส่วนประกอบหลักดังต่อไปนี้ (ภาพที่ 7-2): โพรบ, เพียโซอิเล็กทริกแอคทูเอเตอร์เพื่อย้ายโพรบใน X, Y, Z บนพื้นผิวของตัวอย่างทดสอบ วงจรป้อนกลับ และคอมพิวเตอร์เพื่อควบคุมกระบวนการสแกนและ การรับภาพ

รูปที่ 7 2. แผนผังของกล้องจุลทรรศน์โพรบสแกน
เซ็นเซอร์โพรบ - ส่วนประกอบของกล้องจุลทรรศน์โพรบกำลังที่สแกนการเตรียมการ เซ็นเซอร์โพรบประกอบด้วยคานยื่น (คอนโซลสปริง) แบบสี่เหลี่ยม (รูปตัว I) หรือสามเหลี่ยม (รูปตัววี) (รูปที่ 7-3) ที่ส่วนท้ายจะมีโพรบปลายแหลม (รูปที่ 7-3) ซึ่งมักจะมีรูปทรงกรวยหรือเสี้ยม ปลายอีกด้านของคานยื่นต่อกับพื้นผิว (ด้วยชิปที่เรียกว่า) เซ็นเซอร์โพรบทำจากซิลิกอนหรือซิลิกอนไนไตรด์ ลักษณะสำคัญของคานเท้าแขนคือค่าคงที่ของแรง (ค่าคงที่ความแข็ง) ซึ่งจะแปรผันจาก 0.01 N/m ถึง 1020 N/m ในการศึกษาวัตถุทางชีววิทยา ใช้โพรบ "อ่อน" ที่มีความแข็ง 0.01 0.06 N/m


ข้าว. 7 3. รูปภาพของโพรบ AFM เสี้ยม
ที่ได้จากกล้องจุลทรรศน์อิเล็กตรอน:
a - ประเภทรูปตัว I, b - ประเภทรูปตัววี, c - ปิรามิดที่ปลายเท้าแขน
ตัวกระตุ้นแบบเพียโซอิเล็กทริก หรือเครื่องสแกน - สำหรับการควบคุมการเคลื่อนที่ของโพรบเหนือตัวอย่างหรือตัวตัวอย่างที่สัมพันธ์กับโพรบในระยะที่เล็กมาก ตัวกระตุ้นแบบเพียโซอิเล็กทริกใช้วัสดุเพียโซเซรามิกที่เปลี่ยนขนาดเมื่อแรงดันไฟฟ้าถูกนำไปใช้กับพวกมัน กระบวนการเปลี่ยนพารามิเตอร์ทางเรขาคณิตภายใต้การกระทำของสนามไฟฟ้าเรียกว่าเอฟเฟกต์เพียโซอิเล็กทริกผกผัน piezomaterial ที่พบมากที่สุดคือตะกั่ว zirconate titanate
สแกนเนอร์เป็นโครงสร้างแบบเพียโซเซรามิกที่ให้การเคลื่อนที่ในสามพิกัด: x, y (ในระนาบด้านข้างของตัวอย่าง) และ z (แนวตั้ง) เครื่องสแกนมีหลายประเภท ซึ่งส่วนใหญ่เป็นแบบขาตั้งและแบบท่อ (รูปที่ 7-4)

ข้าว. 7 4. การออกแบบเครื่องสแกน: a) – ขาตั้ง, b) – tubular
ในเครื่องสแกนขาตั้งกล้อง การเคลื่อนไหวในสามพิกัดนั้นมาจากแท่งเพียโซเซรามิกอิสระสามแท่งที่สร้างโครงสร้างมุมฉาก
ในเครื่องสแกนหลอด หลอดเพียโซอิเล็กทริกแบบกลวงจะโค้งงอในระนาบ XZ และ ZY และขยายหรือหดตัวตามแกน Z เมื่อใช้แรงดันไฟฟ้าที่เหมาะสมกับอิเล็กโทรดที่ควบคุมการเคลื่อนที่ของหลอด อิเล็กโทรดสำหรับควบคุมการเคลื่อนที่ในระนาบ XY จะอยู่ที่พื้นผิวด้านนอกของท่อ เพื่อควบคุมการเคลื่อนที่ใน Z จะใช้แรงดันไฟฟ้าเท่ากันกับอิเล็กโทรด X และ Y
วงจรตอบรับ - ชุดองค์ประกอบ SPM โดยใช้โพรบอยู่ห่างจากพื้นผิวตัวอย่างระหว่างการสแกน (รูปที่ 7-5) ในระหว่างขั้นตอนการสแกน สามารถวางโพรบได้บนพื้นที่ของพื้นผิวตัวอย่างโดยมีการผ่อนปรนที่แตกต่างกัน ในขณะที่ระยะห่างของโพรบกับตัวอย่าง Z จะเปลี่ยนแปลง และค่าของปฏิกิริยาระหว่างโพรบกับตัวอย่างจะเปลี่ยนไปตามนั้น

ข้าว. 7 5. รูปแบบข้อเสนอแนะของกล้องจุลทรรศน์โพรบสแกน
เมื่อโพรบเข้าใกล้พื้นผิว แรงโต้ตอบของโพรบกับตัวอย่างจะเพิ่มขึ้น และสัญญาณอุปกรณ์บันทึกก็เพิ่มขึ้นด้วย วี(t), ซึ่ง แสดงเป็นหน่วยของแรงดันไฟ เครื่องเปรียบเทียบเปรียบเทียบสัญญาณ วี(t) ด้วยแรงดันอ้างอิง วี ขั้นพื้นฐานและสร้างสัญญาณแก้ไข วี corr. สัญญาณแก้ไข วี corrถูกป้อนเข้าสู่เครื่องสแกน และโพรบจะหดกลับจากตัวอย่าง แรงดันอ้างอิง - แรงดันไฟที่สอดคล้องกับสัญญาณของอุปกรณ์บันทึกเมื่อโพรบอยู่ห่างจากตัวอย่างที่กำหนด การรักษาระยะห่างของโพรบ-ตัวอย่างที่ระบุนี้ไว้ระหว่างการสแกน ระบบป้อนกลับจะรักษาแรงโต้ตอบของโพรบ-ตัวอย่างที่ระบุ

ข้าว. 7 6. วิถีการเคลื่อนที่สัมพัทธ์ของโพรบในกระบวนการรักษาแรงคงที่ของการโต้ตอบโพรบกับตัวอย่างโดยระบบป้อนกลับ
ในรูป 7-6 แสดงวิถีโคจรของโพรบที่สัมพันธ์กับตัวอย่างในขณะที่รักษาแรงโต้ตอบของโพรบกับตัวอย่างคงที่ หากโพรบอยู่เหนือ fovea แรงดันไฟจะถูกจ่ายไปยังเครื่องสแกน โดยที่เครื่องสแกนจะยืดออก และลดระดับโพรบลง
ความเร็วในการตอบสนองของลูปป้อนกลับต่อการเปลี่ยนแปลงในระยะห่างของโพรบตัวอย่าง (ปฏิกิริยาโพรบกับตัวอย่าง) ถูกกำหนดโดยค่าคงที่ของลูปป้อนกลับ K. ค่านิยม Kขึ้นอยู่กับคุณสมบัติการออกแบบของ SPM เฉพาะ (การออกแบบและคุณสมบัติของเครื่องสแกน อิเล็กทรอนิกส์) โหมดการทำงานของ SPM (ขนาดพื้นที่สแกน ความเร็วในการสแกน ฯลฯ) ตลอดจนคุณสมบัติของพื้นผิวที่ศึกษา (มาตราส่วนของคุณสมบัติการบรรเทา ความแข็งของวัสดุ ฯลฯ)
พันธุ์ SPM
สแกนกล้องจุลทรรศน์อุโมงค์
ใน STM อุปกรณ์บันทึก (รูปที่ 7-7) จะวัดกระแสของอุโมงค์ที่ไหลระหว่างโพรบโลหะ ซึ่งจะแตกต่างกันไปตามศักยภาพบนพื้นผิวตัวอย่างและบนภูมิประเทศของพื้นผิว หัววัดเป็นเข็มที่แหลมคม ซึ่งรัศมีปลายสามารถเข้าถึงได้หลายนาโนเมตร วัสดุสำหรับโพรบมักใช้โลหะที่มีความแข็งสูงและทนต่อสารเคมี: ทังสเตนหรือแพลตตินัม

ข้าว. 7 7. แผนผังของเซ็นเซอร์โพรบอุโมงค์
มีการใช้แรงดันไฟฟ้าระหว่างโพรบที่เป็นสื่อกระแสไฟฟ้าและตัวอย่างที่เป็นสื่อกระแสไฟฟ้า เมื่อปลายโพรบอยู่ห่างจากตัวอย่างประมาณ 10A อิเล็กตรอนจากตัวอย่างจะเริ่มอุโมงค์ผ่านช่องว่างเข้าไปในโพรบหรือในทางกลับกัน ขึ้นอยู่กับสัญญาณของแรงดันไฟฟ้า (รูปที่ 7-8)

ข้าว. 7 8. แผนผังแสดงการทำงานร่วมกันของปลายโพรบกับตัวอย่าง
กระแสอุโมงค์ที่เกิดขึ้นจะถูกวัดโดยอุปกรณ์บันทึก คุณค่าของมัน ผม ตู่สัดส่วนกับแรงดันไฟฟ้าที่ใช้กับหน้าสัมผัสอุโมงค์ วีและแบบทวีคูณขึ้นอยู่กับระยะห่างจากเข็มถึงตัวอย่าง d.
ดังนั้น การเปลี่ยนแปลงเล็กน้อยในระยะห่างจากปลายโพรบไปยังตัวอย่าง dสอดคล้องกับการเปลี่ยนแปลงครั้งใหญ่ในกระแสอุโมงค์ ผม ตู่(สมมติแรงดันไฟฟ้า วีให้คงที่) ด้วยเหตุนี้ ความไวของเซ็นเซอร์โพรบอุโมงค์จึงเพียงพอที่จะบันทึกการเปลี่ยนแปลงความสูงที่น้อยกว่า 0.1 นาโนเมตร และด้วยเหตุนี้ เพื่อให้ได้ภาพของอะตอมบนพื้นผิวของของแข็ง
กล้องจุลทรรศน์แรงปรมาณู
เซ็นเซอร์โพรบทั่วไปที่สุดของปฏิสัมพันธ์ของแรงอะตอมคือสปริงเท้าแขน (จากคอนโซลเท้าแขนภาษาอังกฤษ) โดยมีโพรบอยู่ที่ปลาย ปริมาณของการโค้งงอของเท้าแขนอันเนื่องมาจากแรงโต้ตอบระหว่างตัวอย่างกับโพรบ (รูปที่ 7-9) ถูกวัดโดยใช้รูปแบบการลงทะเบียนด้วยแสง
หลักการทำงานของเซ็นเซอร์วัดแรงยึดตามการใช้แรงอะตอมที่กระทำระหว่างอะตอมของโพรบกับอะตอมของตัวอย่าง เมื่อแรงตัวอย่างโพรบเปลี่ยนแปลง ปริมาณของการโค้งงอของคานรับน้ำหนักจะเปลี่ยนไป และการเปลี่ยนแปลงดังกล่าวจะถูกวัดโดยระบบการลงทะเบียนแบบออปติคัล ดังนั้น เซ็นเซอร์แรงอะตอมจึงเป็นโพรบปลายแหลมที่มีความไวสูง ซึ่งทำให้สามารถบันทึกแรงของปฏิกิริยาระหว่างอะตอมแต่ละตัวได้
สำหรับการโค้งงอขนาดเล็ก อัตราส่วนระหว่างแรงโพรบกับแรงตัวอย่าง Fและการโก่งตัวของปลายเท้าแขน xกำหนดโดยกฎของฮุค:
ที่ไหน k คือค่าคงที่ของแรง (ค่าคงที่ความแข็ง) ของคานยื่น
ตัวอย่างเช่น หากใช้คานเท้าแขนที่มีค่าคงที่ kประมาณ 1 N/m จากนั้นภายใต้การกระทำของแรงปฏิกิริยาระหว่างโพรบกับตัวอย่างประมาณ 0.1 นาโนนิวตัน การโก่งตัวของคานยื่นจะอยู่ที่ประมาณ 0.1 นาโนเมตร
ในการวัดการกระจัดที่มีขนาดเล็กดังกล่าว มักใช้เซ็นเซอร์ออปติคัลดิสเพลสเมนต์เซนเซอร์ (รูปที่ 7-9) ซึ่งประกอบด้วยเลเซอร์เซมิคอนดักเตอร์และโฟโตไดโอดสี่ส่วน เมื่อคานยื่นออกไป ลำแสงเลเซอร์ที่สะท้อนจากลำแสงเลเซอร์จะเลื่อนไปตามจุดศูนย์กลางของตัวตรวจจับแสง ดังนั้น การโค้งงอของเสาเข็มสามารถกำหนดได้จากการเปลี่ยนแปลงสัมพัทธ์ในการส่องสว่างของส่วนบน (T) และส่วนล่าง (B) ของเครื่องตรวจจับแสง

รูปที่ 7 9. แผนผังของเซ็นเซอร์แรง
การพึ่งพาแรงของการโต้ตอบ
เมื่อโพรบเข้าใกล้ตัวอย่าง ครั้งแรกจะถูกดึงดูดไปยังพื้นผิวเนื่องจากมีแรงดึงดูด (แรง van der Waals) เมื่อโพรบเข้าใกล้ตัวอย่างมากขึ้น เปลือกอิเล็กตรอนของอะตอมที่ส่วนท้ายของโพรบและอะตอมบนพื้นผิวของตัวอย่างจะเริ่มซ้อนทับกัน ซึ่งนำไปสู่ลักษณะที่ปรากฏของแรงผลัก เมื่อระยะทางลดลงอีก แรงผลักจะเข้ามาครอบงำ
โดยทั่วไปการพึ่งพาความแข็งแกร่งของปฏิสัมพันธ์ระหว่างอะตอม Fจากระยะห่างระหว่างอะตอม Rดูเหมือน:
 .
.
ค่าคงที่ เอและ ขและเลขชี้กำลัง มและ นขึ้นอยู่กับชนิดของอะตอมและชนิดของพันธะเคมี สำหรับกองกำลัง Van der Waals ม=7 และ n=3. ในเชิงคุณภาพ การพึ่งพา F(R) จะแสดงในรูปที่ 7-10.

ข้าว. 7 10. การพึ่งพาแรงปฏิสัมพันธ์ระหว่างอะตอมกับระยะทาง
รูปแบบข้อมูล SPM การสร้างภาพข้อมูล SPM
ข้อมูลเกี่ยวกับสัณฐานวิทยาของพื้นผิวที่ได้รับระหว่างการศึกษาเกี่ยวกับกล้องจุลทรรศน์แบบใช้แสง ถูกนำเสนอเป็นภาพขยายของพื้นที่ผิว ข้อมูลที่ได้รับจาก SPM นั้นเขียนเป็นอาร์เรย์สองมิติของจำนวนเต็ม A ij สำหรับแต่ละค่า ij สอดคล้องกับจุดเฉพาะบนพื้นผิวภายในช่องสแกน การแสดงกราฟิกของอาร์เรย์ของตัวเลขนี้เรียกว่าภาพที่สแกนโดย SPM
ภาพที่สแกนอาจเป็นแบบสองมิติ (2D) หรือสามมิติ (3D) ด้วยการสร้างภาพ 2 มิติ แต่ละจุดของพื้นผิว Z= ฉ(x,y) กำหนดโทนสีตามความสูงของจุดพื้นผิว (รูปที่ 7-11 ก) ในการสร้างภาพ 3 มิติ ภาพพื้นผิว Z= ฉ(x,y) สร้างขึ้นในเปอร์สเปคทีฟ axonometric โดยใช้พิกเซลหรือเส้นนูนที่คำนวณด้วยวิธีใดวิธีหนึ่ง วิธีที่มีประสิทธิภาพที่สุดในการทำให้ภาพ 3D มีสีคือการจำลองสภาพของการส่องสว่างที่พื้นผิวโดยแหล่งกำเนิดจุดที่อยู่ที่จุดใดจุดหนึ่งในอวกาศเหนือพื้นผิว (รูปที่ 7-11 b) ในกรณีนี้ เป็นไปได้ที่จะเน้นย้ำคุณลักษณะเล็กๆ น้อยๆ ของการผ่อนปรน
|
|


ข้าว. 7 11. เซลล์เม็ดเลือดขาวของมนุษย์:
a) ภาพ 2D, b) ภาพ 3D พร้อมไฟส่องสว่างด้านข้าง
การเตรียมตัวอย่างสำหรับการวิจัย SPM
สัณฐานวิทยาและโครงสร้างของเซลล์แบคทีเรีย
แบคทีเรียเป็นจุลินทรีย์เซลล์เดียวที่มีรูปร่างที่หลากหลายและโครงสร้างที่ซับซ้อน ซึ่งกำหนดความหลากหลายของกิจกรรมการทำงาน แบคทีเรียมีลักษณะเด่นสี่รูปร่าง: ทรงกลม (ทรงกลม), ทรงกระบอก (รูปแท่ง), โค้งมน และมีลักษณะเป็นใย [Ref. 7-2].
cocci (แบคทีเรียทรงกลม) - ขึ้นอยู่กับระนาบของการแบ่งตัวและที่ตั้งของแต่ละบุคคลแบ่งออกเป็น micrococci (แยก cocci นอน), diplococci (คู่ cocci), streptococci (โซ่ของ cocci), staphylococci (มีลักษณะของกลุ่มองุ่น ), tetracocci (การก่อตัวของสี่ cocci ) และ sarcins (แพ็คเกจ 8 หรือ 16 cocci)
รูปแท่ง - แบคทีเรียจะอยู่ในรูปของเซลล์เดี่ยว ไดโพล- หรือสเตรปโตแบคทีเรีย
ของสะสม - ไวบริออส สไปริลลา และสไปโรเชต Vibrios มีลักษณะเป็นแท่งโค้งเล็กน้อย สไปริลลา - รูปร่างที่ซับซ้อนและมีเกลียวหลายเส้น
ขนาดแบคทีเรียมีตั้งแต่ 0.1 ถึง 10 µm องค์ประกอบของเซลล์แบคทีเรียประกอบด้วยแคปซูล ผนังเซลล์ เยื่อหุ้มไซโตพลาสซึมและไซโตพลาสซึม ไซโตพลาสซึมประกอบด้วยนิวคลีโอไทด์ ไรโบโซม และการรวมเข้าด้วยกัน แบคทีเรียบางชนิดมีแฟลกเจลลาและวิลลี่ แบคทีเรียจำนวนหนึ่งสร้างสปอร์ สปอร์เกินขนาดตามขวางเริ่มต้นของเซลล์ สปอร์จะมีรูปร่างเป็นแกนหมุน
เพื่อศึกษาลักษณะทางสัณฐานวิทยาของแบคทีเรียบนกล้องจุลทรรศน์แบบใช้แสง การเตรียมพื้นเมือง (สำคัญ) หรือรอยเปื้อนคงที่ที่ย้อมด้วยสีย้อมนิลจะถูกเตรียมจากพวกมัน มีวิธีการย้อมสีแบบพิเศษเพื่อตรวจหาแฟลกเจลลา ผนังเซลล์ นิวคลีโอไทด์ และการรวมตัวของไซโตพลาสซึมต่างๆ
สำหรับการศึกษา SPM ของสัณฐานวิทยาของเซลล์แบคทีเรีย ไม่จำเป็นต้องย้อมสีของสารเตรียม SPM ทำให้สามารถกำหนดรูปร่างและขนาดของแบคทีเรียด้วยความละเอียดสูงได้ ด้วยการเตรียมการอย่างระมัดระวังและการใช้โพรบที่มีรัศมีความโค้งเล็กน้อย จึงสามารถตรวจจับแฟลกเจลลาได้ ในเวลาเดียวกัน เนื่องจากความแข็งแกร่งของผนังเซลล์แบคทีเรีย จึงเป็นไปไม่ได้ที่จะ "ตรวจสอบ" โครงสร้างภายในเซลล์ อย่างที่สามารถทำได้ในเซลล์สัตว์บางชนิด
การเตรียมการสำหรับการศึกษา SPM ของสัณฐานวิทยา
สำหรับประสบการณ์ครั้งแรกกับ SPM ขอแนะนำให้เลือกการเตรียมทางชีวภาพที่ไม่ต้องการการเตรียมที่ซับซ้อน แบคทีเรียกรดแลคติกที่เข้าถึงได้ง่ายและไม่ก่อให้เกิดโรคจากน้ำเกลือกะหล่ำปลีดองหรือผลิตภัณฑ์นมหมักนั้นค่อนข้างเหมาะสม
สำหรับการศึกษา SPM ในอากาศ จำเป็นต้องยึดวัตถุภายใต้การศึกษาบนพื้นผิวของพื้นผิวอย่างแน่นหนา เช่น บนใบปิด นอกจากนี้ ความหนาแน่นของแบคทีเรียในสารแขวนลอยควรเป็นแบบที่เซลล์ไม่เกาะติดกันระหว่างการสะสมบนพื้นผิว และระยะห่างระหว่างพวกมันไม่ควรใหญ่เกินไปเพื่อให้สามารถถ่ายวัตถุหลายชิ้นระหว่างการสแกนในเฟรมเดียวได้ จะเป็นไปตามเงื่อนไขเหล่านี้หากเลือกโหมดการเตรียมตัวอย่างอย่างถูกต้อง หากหยดสารละลายที่มีแบคทีเรียลงบนพื้นผิวจะเกิดการตกตะกอนและการยึดเกาะทีละน้อย ในกรณีนี้ควรพิจารณาความเข้มข้นของเซลล์ในสารละลายและเวลาในการตกตะกอนเป็นพารามิเตอร์หลัก ความเข้มข้นของแบคทีเรียในสารแขวนลอยถูกกำหนดโดยมาตรฐานความขุ่นทางแสง
ในกรณีของเรา พารามิเตอร์เดียวเท่านั้นที่จะมีบทบาท - ระยะฟักตัว ยิ่งหยดลงบนกระจกนานเท่าไร เซลล์แบคทีเรียก็จะยิ่งมีความหนาแน่นมากขึ้นเท่านั้น ในเวลาเดียวกัน ถ้าหยดของเหลวเริ่มแห้ง การเตรียมการจะถูกปนเปื้อนมากเกินไปโดยส่วนประกอบตกตะกอนของสารละลาย หยดสารละลายที่มีเซลล์แบคทีเรีย (น้ำเกลือ) หยดลงบนใบปะหน้า ฟักเป็นเวลา 5-60 นาที (ขึ้นอยู่กับองค์ประกอบของสารละลาย) จากนั้นโดยไม่ต้องรอให้หยดแห้ง พวกเขาจะถูกล้างด้วยน้ำกลั่นอย่างทั่วถึง (จุ่มการเตรียมด้วยแหนบลงในแก้วหลายครั้ง) หลังจากการอบแห้ง การเตรียมการก็พร้อมสำหรับการวัดค่าบน SPM
ตัวอย่างเช่น การเตรียมแบคทีเรียกรดแลคติกถูกเตรียมจากน้ำเกลือกะหล่ำปลีดอง เลือกเวลาเปิดรับน้ำเกลือบนใบปะหน้าเป็น 5 นาที 20 นาที และ 1 ชั่วโมง (หยดเริ่มแห้งแล้ว) SPM - เฟรมแสดงในรูปที่ 7 -12, รูปที่. 7-13,
ข้าว. 7-14.
จะเห็นได้จากตัวเลขสำหรับการแก้ปัญหานี้ เวลาฟักตัวที่เหมาะสมคือ 510 นาที การเพิ่มเวลาในการรักษาการหยดบนพื้นผิวของสารตั้งต้นนำไปสู่การยึดเกาะของเซลล์แบคทีเรีย ในกรณีที่สารละลายเริ่มแห้ง ส่วนประกอบของสารละลายจะเกาะอยู่บนกระจก ซึ่งไม่สามารถล้างออกได้

ข้าว. 7 12. ภาพแบคทีเรียกรดแลคติกบนใบปะหน้า
ได้รับโดยใช้ SPM

ข้าว. 7 13. ภาพแบคทีเรียกรดแลคติกบนใบปะหน้า
ได้รับโดยใช้ SPM เวลาในการฟักตัวของสารละลาย 20 นาที

ข้าว. 7 14. ภาพแบคทีเรียกรดแลคติกบนใบปะหน้า
ได้รับโดยใช้ SPM เวลาในการฟักตัวของสารละลาย 1 ชั่วโมง
ในการเตรียมการที่เลือกอย่างใดอย่างหนึ่ง (รูปที่ 7-12) เราพยายามพิจารณาว่าแบคทีเรียกรดแลคติกคืออะไร ในกรณีนี้มีลักษณะเฉพาะในรูปแบบใด (รูปที่ 7-15)

ข้าว. 7 15. AFM - ภาพแบคทีเรียกรดแลคติกบนใบปะหน้า
เวลาในการฟักตัวของสารละลาย 5 นาที

ข้าว. 7 16. AFM - ภาพของสายโซ่ของแบคทีเรียกรดแลคติกบนใบปะหน้า
เวลาในการฟักตัวของสารละลาย 5 นาที
น้ำเกลือมีลักษณะเป็นรูปร่างของแบคทีเรียรูปแท่งและการจัดเรียงตัวเป็นลูกโซ่

ข้าว. 7 17. หน้าต่างของโปรแกรมควบคุมของ SPM NanoEducator เพื่อการศึกษา
แถบเครื่องมือ
โดยใช้เครื่องมือของโปรแกรม SPM NanoEducator เพื่อการศึกษา เราได้กำหนดขนาดของเซลล์แบคทีเรีย มีตั้งแต่ 0.5 × 1.6 µm
สูงสุด 0.8 × 3.5 µm
ผลลัพธ์ที่ได้จะถูกนำไปเปรียบเทียบกับข้อมูลที่ให้ไว้ในตัวกำหนดของแบคทีเรีย Bergey [Lit. 7-3].
แบคทีเรียกรดแลคติกเป็นของแลคโตบาซิลลัส (แลคโตบาซิลลัส) เซลล์มีลักษณะเป็นแท่ง มักมีรูปร่างสม่ำเสมอ ก้านยาว บางครั้งเกือบเป็น coccoid มักเป็นโซ่สั้น ขนาด 0.5 - 1.2 X 1.0 - 10 ไมครอน ข้อพิพาทไม่ก่อตัว ในบางกรณี พวกมันเคลื่อนที่ได้เนื่องจากแฟลกเจลลา peririchous กระจายอยู่ทั่วไปในสิ่งแวดล้อม โดยเฉพาะในอาหารที่มีต้นกำเนิดจากสัตว์และพืช แบคทีเรียกรดแลคติกเป็นส่วนหนึ่งของจุลินทรีย์ปกติของทางเดินอาหาร ทุกคนรู้ดีว่ากะหล่ำปลีดองนอกจากเนื้อหาของวิตามินแล้วยังมีประโยชน์สำหรับการปรับปรุงจุลินทรีย์ในลำไส้
การออกแบบกล้องจุลทรรศน์โพรบสแกน NanoEducator
ในรูป 7-18 แสดงลักษณะของหัววัด SPM NanoEducatorและมีการระบุองค์ประกอบหลักของอุปกรณ์ที่ใช้ในงาน

ข้าว. 7 18. ลักษณะของหัววัด SPM NanoEducator
1 ฐาน, ตัวยึด 2 ตัวอย่าง, เซ็นเซอร์ 3 อัน, สกรูยึดเซ็นเซอร์ 4 ตัว,
5 สกรูสำหรับการเข้าใกล้แบบแมนนวล, 6 สกรูสำหรับการเคลื่อนย้ายสแกนเนอร์พร้อมตัวอย่างในระนาบแนวนอน, ฝาครอบป้องกัน 7 อันพร้อมกล้องวิดีโอ
ในรูป 7-19 แสดงการออกแบบหัววัด บนฐาน 1 มีเครื่องสแกน 8 พร้อมที่จับตัวอย่าง 7 และกลไกสำหรับนำตัวอย่างไปยังโพรบ 2 โดยใช้สเต็ปเปอร์มอเตอร์ ในด้านการศึกษา SPM NanoEducatorตัวอย่างได้รับการแก้ไขบนสแกนเนอร์ และตัวอย่างจะถูกสแกนโดยสัมพันธ์กับโพรบคงที่ โพรบ 6 ซึ่งจับจ้องอยู่ที่เซ็นเซอร์ปฏิกิริยาแรง 4 ยังสามารถเข้าหาตัวอย่างได้โดยใช้สกรูเข้าหาแบบแมนนวล 3 การเลือกเบื้องต้นของสถานที่ศึกษาในตัวอย่างจะดำเนินการโดยใช้สกรู 9

ข้าว. 7 19. การสร้าง SPM NanoEducator: 1 – ฐาน 2 – กลไกการเข้าหา
3 – สกรูเข้าหาแบบแมนนวล, 4 – เซ็นเซอร์โต้ตอบ, 5 – สกรูยึดเซ็นเซอร์, 6 – โพรบ,
7 - ตัวยึดตัวอย่าง, 8 - สแกนเนอร์, 9, 10 - สกรูสำหรับเคลื่อนย้ายเครื่องสแกนด้วยตัวอย่าง
การฝึกอบรม SPM NanoEducatorประกอบด้วยหัววัดที่เชื่อมต่อด้วยสายเคเบิล ตัวควบคุม SPM และคอมพิวเตอร์ควบคุม กล้องจุลทรรศน์มีกล้องวิดีโอ สัญญาณจากเซ็นเซอร์การโต้ตอบหลังจากการแปลงในพรีแอมพลิฟายเออร์จะเข้าสู่คอนโทรลเลอร์ SPM การจัดการงาน SPM NanoEducatorดำเนินการจากคอมพิวเตอร์ผ่านตัวควบคุม SPM
เซ็นเซอร์แรงปฏิกิริยาและโพรบ
ในเครื่อง NanoEducatorเซนเซอร์ทำในรูปของท่อ piezoceramic ที่มีความยาว l=7 มม. เส้นผ่านศูนย์กลาง d=1.2 มม. และความหนาของผนัง ชม\u003d 0.25 มม. แก้ไขอย่างแน่นหนาที่ปลายด้านหนึ่ง อิเล็กโทรดนำไฟฟ้าจะสะสมอยู่ที่พื้นผิวด้านในของท่อ อิเล็กโทรดกึ่งทรงกระบอกที่หุ้มฉนวนไฟฟ้าสองตัววางอยู่ที่พื้นผิวด้านนอกของท่อ ติดกับปลายท่ออิสระเป็นลวดทังสเตนที่มีเส้นผ่านศูนย์กลาง
100 µm (รูปที่ 7-20)

ข้าว. 7 20. การออกแบบเซ็นเซอร์สากลของ NanoEducator
ปลายสายอิสระที่ใช้เป็นโพรบเป็นแบบกราวด์ด้วยไฟฟ้าเคมี รัศมีความโค้งคือ 0.2 0.05 µm หัววัดมีหน้าสัมผัสทางไฟฟ้ากับอิเล็กโทรดภายในของท่อที่เชื่อมต่อกับตัวเครื่องที่ต่อสายดินของเครื่องมือ
การมีอยู่ของอิเล็กโทรดภายนอกสองอิเล็กโทรดบนท่อเพียโซอิเล็กทริกทำให้ส่วนหนึ่งของท่อเพียโซอิเล็กทริก (ด้านบน ตามรูปที่ 7-21) ถูกใช้เป็นเซ็นเซอร์แรงโต้ตอบ (เซ็นเซอร์การสั่นสะเทือนทางกล) และอีกส่วนหนึ่งจะเป็น ใช้เป็นเครื่องพายโซวิเบรเตอร์ แรงดันไฟฟฉาสลับจะจจายไปยังเครื่องเพียโซไวเบรเตอรฌที่มีความถี่เทจากับความถี่เรโซแนนตฌของเซ็นเซอรฌกําลัง แอมพลิจูดการสั่นที่ระยะปลายตัวอย่างขนาดใหญ่มีค่าสูงสุด ดังจะเห็นได้จากรูปที่ 7-22 ระหว่างกระบวนการสั่น โพรบเบี่ยงเบนจากตำแหน่งสมดุลด้วยปริมาณ A o เท่ากับแอมพลิจูดของการสั่นทางกลบังคับ (เป็นเศษส่วนของไมโครมิเตอร์) ในขณะที่แรงดันไฟฟ้าสลับปรากฏขึ้นในส่วนที่สองของ piezotube (เซ็นเซอร์การสั่น) สัดส่วนกับ displacement ของโพรบซึ่งวัดโดยเครื่องมือ
เมื่อโพรบเข้าใกล้พื้นผิวของตัวอย่าง โพรบจะเริ่มสัมผัสตัวอย่างระหว่างการสั่น สิ่งนี้นำไปสู่การเปลี่ยนแปลงในลักษณะแอมพลิจูด-ความถี่ (AFC) ของการสั่นของเซ็นเซอร์ไปทางซ้ายเมื่อเทียบกับ AFC ที่วัดได้ไกลจากพื้นผิว (รูปที่ 7-22) เนื่องจากความถี่ของการขับเคลื่อนการแกว่งของ piezotube นั้นคงที่และเท่ากับความถี่การสั่น о ในสถานะอิสระ เมื่อโพรบเข้าใกล้พื้นผิว แอมพลิจูดของการแกว่งของมันจะลดลงและเท่ากับ A แอมพลิจูดของการสั่นนี้ถูกบันทึกไว้ จากส่วนที่สองของ piezotube

ข้าว. 7 21. หลักการทำงานของท่อเพียโซอิเล็กทริก
เป็นเซ็นเซอร์ปฏิสัมพันธ์แรง

ข้าว. 7 22. การเปลี่ยนความถี่การสั่นของเซ็นเซอร์แรง
เมื่อเข้าใกล้พื้นผิวตัวอย่าง
สแกนเนอร์
วิธีการจัดระเบียบการเคลื่อนไหวขนาดเล็กที่ใช้ในเครื่อง NanoEducatorขึ้นอยู่กับการใช้เมมเบรนโลหะยึดรอบปริมณฑลกับพื้นผิวที่ติดแผ่นเพียโซอิเล็กทริก (รูปที่ 7-23 ก) การเปลี่ยนแปลงขนาดของแผ่นเพียโซอิเล็กทริกภายใต้การกระทำของแรงดันควบคุมจะนำไปสู่การดัดของเมมเบรน โดยการวางเมมเบรนดังกล่าวบนสามด้านตั้งฉากของลูกบาศก์และเชื่อมต่อจุดศูนย์กลางกับตัวดันโลหะ คุณจะได้เครื่องสแกน 3 พิกัด (รูปที่ 7-23 ข)

ข้าว. 7 23. หลักการทำงาน (ก) และการออกแบบ (ข) ของเครื่องสแกน NanoEducator
แต่ละองค์ประกอบเพียโซอิเล็กทริก 1 ซึ่งจับจ้องอยู่ที่ใบหน้าของลูกบาศก์ 2 เมื่อใช้แรงดันไฟฟ้ากับมัน สามารถเคลื่อนตัวดัน 3 ที่ติดอยู่กับมันในหนึ่งในสามทิศทางตั้งฉากซึ่งกันและกัน - X, Y หรือ Z ดังที่เห็นได้จาก จากรูป ตัวผลักทั้งสามตัวเชื่อมต่อกันที่จุดหนึ่ง 4 เมื่อประมาณแล้ว เราสามารถสรุปได้ว่าจุดนี้เคลื่อนที่ไปตามพิกัด 3 ตัว X, Y, Z ชั้นวาง 5 พร้อมตัวยึดตัวอย่าง 6 ติดอยู่ที่จุดเดียวกัน ดังนั้น ตัวอย่างจะเคลื่อนที่ไปตามพิกัดสามพิกัดภายใต้การกระทำของแหล่งจ่ายแรงดันไฟอิสระสามแหล่ง ในเครื่องใช้ไฟฟ้า NanoEducatorการกระจัดสูงสุดของตัวอย่างคือประมาณ 5070 µm ซึ่งกำหนดพื้นที่การสแกนสูงสุด
กลไกสำหรับวิธีการอัตโนมัติของโพรบไปยังตัวอย่าง (การจับความคิดเห็น)
ระยะการเคลื่อนที่ของเครื่องสแกนตามแนวแกน Z อยู่ที่ประมาณ 10 µm ดังนั้นก่อนการสแกน จึงจำเป็นต้องนำโพรบเข้าใกล้ตัวอย่างมากขึ้นในระยะนี้ เพื่อจุดประสงค์นี้กลไกการเข้าถึงได้รับการออกแบบมาซึ่งรูปแบบที่แสดงในรูปที่ 7-19. สเต็ปเปอร์มอเตอร์ 1 เมื่อใช้แรงกระตุ้นทางไฟฟ้า ให้หมุนสกรูป้อน 2 และย้ายแถบ 3 ด้วยโพรบ 4 ดึงให้เข้าใกล้หรือห่างจากตัวอย่าง 5 ที่ติดตั้งบนเครื่องสแกน 6 ค่าของขั้นตอนเดียวคือ ประมาณ 2 ไมโครเมตร

ข้าว. 7 24. แผนผังกลไกการเข้าใกล้โพรบไปยังพื้นผิวตัวอย่าง
เนื่องจากขั้นตอนของกลไกการเข้าใกล้เกินค่าของระยะห่างของโพรบตัวอย่างที่ต้องการอย่างมากในระหว่างการสแกน เพื่อหลีกเลี่ยงการเปลี่ยนรูปของโพรบ วิธีการของโพรบจึงถูกดำเนินการพร้อมกับการทำงานของสเต็ปเปอร์มอเตอร์และการเคลื่อนที่ของสแกนเนอร์ตามแนวแกน Z แกนตามอัลกอริทึมต่อไปนี้:
1. ระบบป้อนกลับปิดและสแกนเนอร์ "หดกลับ" กล่าวคือ ลดตัวอย่างลงไปยังตำแหน่งสุดขั้วที่ต่ำกว่า
2. กลไกการเข้าใกล้โพรบใช้ขั้นตอนเดียวและหยุดลง
3. เปิดระบบป้อนกลับ และเครื่องสแกนจะยกตัวอย่างอย่างราบรื่น ขณะที่วิเคราะห์ปฏิกิริยาระหว่างโพรบกับตัวอย่าง
4. หากไม่มีปฏิสัมพันธ์ กระบวนการจะทำซ้ำจากจุดที่ 1
หากสัญญาณที่ไม่เป็นศูนย์ปรากฏขึ้นขณะดึงสแกนเนอร์ขึ้น ระบบป้อนกลับจะหยุดการเคลื่อนขึ้นของสแกนเนอร์และแก้ไขปริมาณการโต้ตอบที่ระดับที่กำหนด ขนาดของแรงโต้ตอบที่การเข้าใกล้โพรบจะหยุดและกระบวนการสแกนจะเกิดขึ้นในอุปกรณ์ NanoEducatorโดดเด่นด้วยพารามิเตอร์ การปราบปรามแอมพลิจูด (แอมพลิจูดการปราบปราม) :
ก=อ. (ปราบปราม 1-Amplitude)
การรับภาพ SPM
หลังจากเรียกโปรแกรม NanoEducatorหน้าต่างโปรแกรมหลักจะปรากฏบนหน้าจอคอมพิวเตอร์ (รูปที่ 7-20) ควรเริ่มงานจากรายการเมนู ไฟล์และในนั้นเลือก เปิดหรือ ใหม่หรือปุ่มที่เกี่ยวข้องบนแถบเครื่องมือ (, )
การคัดเลือกทีม ไฟล์ ใหม่หมายถึงการเปลี่ยนไปใช้การวัด SPM และการเลือกคำสั่ง ไฟล์ เปิดหมายถึงการเปลี่ยนไปใช้ดูและประมวลผลข้อมูลที่ได้รับก่อนหน้านี้ โปรแกรมช่วยให้คุณดูและประมวลผลข้อมูลควบคู่ไปกับการวัด

ข้าว. 7 25. หน้าต่างหลักของ NanoEducator
หลังจากดำเนินการคำสั่ง ไฟล์ ใหม่กล่องโต้ตอบปรากฏขึ้นบนหน้าจอ ซึ่งช่วยให้คุณสามารถเลือกหรือสร้างโฟลเดอร์การทำงานซึ่งผลลัพธ์ของการวัดปัจจุบันจะถูกบันทึกเป็นค่าเริ่มต้น ในระหว่างการวัด ข้อมูลที่ได้รับทั้งหมดจะถูกบันทึกตามลำดับในไฟล์ที่มีชื่อ ScanData+i.spm, โดยที่ดัชนี ผมจะถูกรีเซ็ตเป็นศูนย์เมื่อโปรแกรมเริ่มทำงานและจะเพิ่มขึ้นตามการวัดใหม่แต่ละครั้ง ไฟล์ ScanData+i.spmจะถูกวางไว้ในโฟลเดอร์การทำงานซึ่งถูกกำหนดไว้ก่อนเริ่มการวัด สามารถเลือกโฟลเดอร์การทำงานอื่นระหว่างการวัดได้ เมื่อต้องการทำสิ่งนี้ ให้กดปุ่ม , อยู่บนแถบเครื่องมือของหน้าต่างโปรแกรมหลักและเลือกรายการเมนู เปลี่ยนโฟลเดอร์การทำงาน.
หากต้องการบันทึกผลการวัดปัจจุบัน ให้กดปุ่ม บันทึกเป็นในหน้าต่างสแกนในกล่องโต้ตอบที่ปรากฏขึ้น เลือกโฟลเดอร์และระบุชื่อไฟล์ในขณะที่ไฟล์ ScanData+i.spmซึ่งทำหน้าที่เป็นไฟล์บันทึกข้อมูลชั่วคราวระหว่างการวัด จะถูกเปลี่ยนชื่อเป็นชื่อไฟล์ที่คุณระบุ โดยค่าเริ่มต้น ไฟล์จะถูกบันทึกไว้ในโฟลเดอร์การทำงานที่กำหนดไว้ก่อนเริ่มการวัด หากคุณไม่ได้ดำเนินการบันทึกผลการวัด ครั้งต่อไปที่คุณเริ่มโปรแกรม ผลลัพธ์จะบันทึกเป็นไฟล์ชั่วคราว ScanData+i.spmจะถูกเขียนทับตามลำดับ (เว้นแต่ไดเร็กทอรีการทำงานจะมีการเปลี่ยนแปลง) เกี่ยวกับการมีอยู่ของไฟล์ชั่วคราวของผลการวัดในโฟลเดอร์การทำงาน จะมีการออกคำเตือนก่อนปิดและหลังจากเริ่มโปรแกรม การเปลี่ยนโฟลเดอร์การทำงานก่อนเริ่มการวัดจะช่วยให้คุณสามารถป้องกันการลบผลลัพธ์ของการทดสอบครั้งก่อนได้ ชื่อเริ่มต้น ScanDataสามารถเปลี่ยนได้โดยระบุในหน้าต่างการเลือกโฟลเดอร์ทำงาน หน้าต่างสำหรับเลือกโฟลเดอร์ทำงานจะถูกเรียกเมื่อกดปุ่ม , อยู่บนแถบเครื่องมือของหน้าต่างโปรแกรมหลัก คุณยังสามารถบันทึกผลการวัดในหน้าต่าง สแกนเบราว์เซอร์โดยเลือกไฟล์ที่จำเป็นทีละไฟล์และบันทึกลงในโฟลเดอร์ที่เลือก
เป็นไปได้ที่จะส่งออกผลลัพธ์ที่ได้รับจาก NanoEducator เป็นรูปแบบ ASCII และ Nova (NTMDT) ซึ่งสามารถนำเข้าได้โดยโปรแกรม NTMDT Nova, การวิเคราะห์รูปภาพ และโปรแกรมอื่นๆ สแกนรูปภาพ ข้อมูลของภาพตัดขวาง ผลลัพธ์ของการวัดด้วยสเปกโตรสโคปีจะส่งออกไปยังรูปแบบ ASCII หากต้องการส่งออกข้อมูล ให้คลิกปุ่ม ส่งออกอยู่ในแถบเครื่องมือของหน้าต่างแอปพลิเคชันหลัก หรือเลือก ส่งออกในรายการเมนู ไฟล์หน้าต่างนี้และเลือกรูปแบบการส่งออกที่เหมาะสม ข้อมูลสำหรับการประมวลผลและการวิเคราะห์สามารถส่งข้อมูลไปยังโปรแกรมวิเคราะห์รูปภาพที่เปิดไว้ล่วงหน้าได้ทันที
หลังจากปิดหน้าต่างโต้ตอบ แผงควบคุมแผงหน้าปัดจะปรากฏขึ้นบนหน้าจอ
(รูปที่ 7-26).

ข้าว. 7 26. แผงควบคุมอุปกรณ์
ที่ด้านซ้ายของแผงควบคุมแผงหน้าปัด จะมีปุ่มสำหรับเลือกการกำหนดค่า SPM:
SSM– กล้องจุลทรรศน์กำลังสแกน (SFM)
STM– กล้องจุลทรรศน์สแกนอุโมงค์ (STM)
การดำเนินการวัดในการฝึกอบรม SPM NanoEducator ประกอบด้วยการดำเนินการดังต่อไปนี้:
1. การติดตั้งตัวอย่าง
ความสนใจ! ก่อนใส่ตัวอย่าง จำเป็นต้องถอดเซ็นเซอร์ด้วยหัววัดเพื่อไม่ให้หัววัดเสียหาย
มีสองวิธีในการแก้ไขตัวอย่าง:
บนโต๊ะแม่เหล็ก (ในกรณีนี้ ต้องแนบตัวอย่างกับพื้นผิวแม่เหล็ก)
บนเทปกาวสองหน้า
ความสนใจ! ในการติดตั้งตัวอย่างบนเทปกาวสองหน้า จำเป็นต้องคลายเกลียวตัวยึดออกจากชั้นวาง (เพื่อไม่ให้เครื่องสแกนเสียหาย) แล้วขันกลับเข้าไปจนสุด
ในกรณีของตัวยึดแม่เหล็ก สามารถเปลี่ยนตัวอย่างได้โดยไม่ต้องคลายเกลียวตัวยึดตัวอย่าง
2. การติดตั้งโพรบ
ความสนใจ! ติดตั้งเซ็นเซอร์ด้วยหัววัดทุกครั้งหลังจากวางตัวอย่าง
หลังจากเลือกเซนเซอร์โพรบที่ต้องการแล้ว (จับโพรบที่ขอบโลหะของฐาน) (ดูรูปที่ 7-27) คลายสกรูยึดโพรบโพรบ 2 บนฝาครอบหัววัด เสียบโพรบเข้าไปในซ็อกเก็ตของตัวยึดจนสุด ขันสกรูยึดตามเข็มนาฬิกาจนสุด

ข้าว. 7 27. การติดตั้งโพรบ
3. การเลือกตำแหน่งสแกน
เมื่อเลือกไซต์สำหรับการวิจัยเกี่ยวกับตัวอย่าง ให้ใช้สกรูสำหรับเคลื่อนย้ายตารางสองพิกัดที่อยู่ด้านล่างของอุปกรณ์
4. วิธีการเบื้องต้นของโพรบไปยังตัวอย่าง
การดำเนินการเข้าใกล้เบื้องต้นไม่จำเป็นสำหรับการวัดแต่ละครั้ง ความจำเป็นในการใช้งานขึ้นอยู่กับระยะห่างระหว่างตัวอย่างกับส่วนปลายของโพรบ ขอแนะนำให้ดำเนินการเข้าใกล้เบื้องต้นหากระยะห่างระหว่างปลายโพรบกับพื้นผิวตัวอย่างเกิน 0.51 มม. เมื่อใช้วิธีการอัตโนมัติของโพรบไปยังตัวอย่างจากระยะห่างระหว่างกันมาก กระบวนการเข้าใกล้จะใช้เวลานานมาก
ใช้สกรูแบบมือจับลดระดับโพรบในขณะที่ควบคุมระยะห่างระหว่างโพรบกับพื้นผิวตัวอย่างด้วยสายตา
5. การสร้างเส้นโค้งเรโซแนนซ์และการตั้งค่าความถี่ในการทำงาน
การดำเนินการนี้จำเป็นต้องดำเนินการในตอนเริ่มต้นของการวัดแต่ละครั้ง และจนกว่าจะดำเนินการ การเปลี่ยนไปใช้ขั้นตอนการวัดเพิ่มเติมจะถูกบล็อก นอกจากนี้ ในระหว่างกระบวนการวัด บางครั้งอาจมีสถานการณ์ที่ต้องดำเนินการนี้ใหม่ (เช่น เมื่อขาดการติดต่อ)
หน้าต่างค้นหาด้วยเรโซแนนซ์จะเรียกขึ้นมาโดยกดปุ่มบนแผงควบคุมแผงหน้าปัด การดำเนินการนี้เกี่ยวข้องกับการวัดแอมพลิจูดของการสั่นของโพรบเมื่อความถี่ของการสั่นแบบบังคับซึ่งกำหนดโดยเครื่องกำเนิดเปลี่ยนแปลง เมื่อต้องการทำสิ่งนี้ ให้กดปุ่ม วิ่ง(รูปที่ 7-28).
|
|


ข้าว. 7 28. หน้าต่างการดำเนินการค้นหาด้วยเรโซแนนซ์และการตั้งค่าความถี่ในการทำงาน:
a) - โหมดอัตโนมัติ b) - โหมดแมนนวล
อยู่ในโหมด รถยนต์ความถี่ออสซิลเลเตอร์จะถูกตั้งค่าโดยอัตโนมัติเท่ากับความถี่ที่สังเกตแอมพลิจูดสูงสุดของการสั่นของโพรบ กราฟแสดงการเปลี่ยนแปลงแอมพลิจูดของการสั่นของโพรบในช่วงความถี่ที่กำหนด (รูปที่ 7-28a) ช่วยให้คุณสังเกตรูปร่างของพีคเรโซแนนซ์ได้ หากเรโซแนนซ์พีคไม่เด่นชัดเพียงพอ หรือแอมพลิจูดที่ความถี่เรโซแนนซ์มีขนาดเล็ก ( น้อยกว่า 1V) จากนั้นจึงจำเป็นต้องเปลี่ยนพารามิเตอร์การวัดและกำหนดความถี่เรโซแนนซ์อีกครั้ง
โหมดนี้มีไว้สำหรับ คู่มือ. เมื่อเลือกโหมดนี้ในหน้าต่าง การกำหนดความถี่เรโซแนนซ์แผงเพิ่มเติมปรากฏขึ้น
(รูปที่ 7-28b) ซึ่งช่วยให้คุณปรับพารามิเตอร์ต่อไปนี้:
แรงดันสวิงโพรบให้โดยเครื่องกำเนิดไฟฟ้า ขอแนะนำให้ตั้งค่านี้เป็นค่าต่ำสุด (ลงไปที่ศูนย์) และไม่เกิน 50 mV
ขยายความกว้าง ( ขยายความกว้าง). หากแอมพลิจูดการสั่นของโพรบไม่เพียงพอ (<1 В) рекомендуется увеличить коэффициент ขยายความกว้าง.
ในการเริ่มดำเนินการค้นหาด้วยเรโซแนนซ์ ให้กดปุ่ม เริ่ม.
โหมด คู่มือให้คุณเปลี่ยนความถี่ที่เลือกได้ด้วยตนเองโดยเลื่อนเคอร์เซอร์สีเขียวบนกราฟด้วยเมาส์ ตลอดจนชี้แจงลักษณะของการเปลี่ยนแปลงในแอมพลิจูดการสั่นในช่วงค่าที่แคบรอบความถี่ที่เลือก (การทำเช่นนี้ คุณต้องตั้งค่าสวิตช์ โหมดแมนนวลเข้าสู่ตำแหน่ง อย่างแน่นอนและกดปุ่ม เริ่ม).
6. การจับภาพการโต้ตอบ
ในการจับภาพการโต้ตอบ ขั้นตอนของวิธีการควบคุมของโพรบและตัวอย่างจะดำเนินการโดยใช้กลไกการเข้าใกล้อัตโนมัติ หน้าต่างควบคุมสำหรับขั้นตอนนี้ถูกเรียกขึ้นมาโดยกดปุ่มบนแผงควบคุมแผงหน้าปัด เมื่อทำงานกับ CCM ปุ่มนี้จะใช้งานได้หลังจากดำเนินการค้นหาและตั้งค่าความถี่เรโซแนนซ์ หน้าต่าง CCM, ตะกั่ว(รูปที่ 7-29) ประกอบด้วยส่วนควบคุมวิธีการสอบสวน เช่นเดียวกับตัวบ่งชี้พารามิเตอร์ที่ช่วยให้คุณวิเคราะห์ความคืบหน้าของขั้นตอนได้

ข้าว. 7 29. หน้าต่างโพรบเข้าใกล้
ในหน้าต่าง จัดหาผู้ใช้มีความสามารถในการตรวจสอบค่าต่อไปนี้:
ส่วนขยายสแกนเนอร์ ( สแกนเนอร์Z) ตามแกน Z ที่สัมพันธ์กับค่าสูงสุดที่เป็นไปได้ นำมาเป็นหน่วย ค่าของการยืดตัวสัมพัทธ์ของสแกนเนอร์นั้นถูกกำหนดโดยระดับการเติมของตัวบ่งชี้ด้านซ้ายด้วยสีที่สอดคล้องกับพื้นที่ที่สแกนเนอร์ตั้งอยู่ในปัจจุบัน: สีเขียว - พื้นที่ทำงาน สีฟ้า - นอกพื้นที่ทำงาน สีแดง - สแกนเนอร์ เข้าใกล้พื้นผิวตัวอย่างมากเกินไป ซึ่งอาจนำไปสู่การเสียรูปของโพรบได้ ในกรณีหลัง โปรแกรมจะส่งเสียงเตือน
แอมพลิจูดการสั่นของโพรบสัมพันธ์กับแอมพลิจูดของการแกว่งในกรณีที่ไม่มีแรงโต้ตอบ นำมาเป็นเอกภาพ ค่าของแอมพลิจูดสัมพัทธ์ของการสั่นของโพรบจะแสดงบนตัวบ่งชี้ที่ถูกต้องตามระดับการเติมในเบอร์กันดี เครื่องหมายแนวนอนบนตัวบ่งชี้ แอมพลิจูดการสั่นของโพรบระบุระดับเมื่อผ่านการวิเคราะห์สถานะของเครื่องสแกนและส่งออกไปยังตำแหน่งการทำงานโดยอัตโนมัติ
จำนวนขั้นตอน ( Wagi) ผ่านไปในทิศทางที่กำหนด: วิธีการ - แนวทาง การถอนออก - การกำจัด
ก่อนเริ่มกระบวนการลดระดับโพรบ คุณต้อง:
ตรวจสอบว่าตั้งค่าพารามิเตอร์วิธีการถูกต้องหรือไม่:
ผลตอบรับ ระบบปฏิบัติการที่ได้รับตั้งเป็นค่า 3 ,
ตรวจสอบให้แน่ใจว่าพารามิเตอร์ การปราบปรามแอมพลิจูด (แรง)มีค่าประมาณ 0.2 (ดูรูปที่ 7-29) หรือกดปุ่ม พลังและในหน้าต่าง การตั้งค่าพารามิเตอร์การโต้ตอบ (รูปที่ 7-30)ตั้งค่า การปราบปรามแอมพลิจูดเท่ากัน 0.2. สำหรับวิธีการที่ละเอียดอ่อนยิ่งขึ้น ค่าพารามิเตอร์ การปราบปรามแอมพลิจูดอาจจะน้อยกว่า .
ตรวจสอบว่าการตั้งค่าถูกต้องในหน้าต่างพารามิเตอร์หรือไม่ พารามิเตอร์, หน้าหนังสือ พารามิเตอร์แนวทาง.
มีปฏิสัมพันธ์หรือไม่สามารถกำหนดได้โดยตัวบ่งชี้ด้านซ้าย สแกนเนอร์Z. ส่วนขยายสแกนเนอร์แบบเต็ม (ตัวบ่งชี้ทั้งหมด สแกนเนอร์Zเป็นสีน้ำเงิน) รวมถึงตัวบ่งชี้เบอร์กันดีแรเงาอย่างสมบูรณ์ แอมพลิจูดการสั่นของโพรบ(รูปที่ 7-29) ระบุว่าไม่มีการโต้ตอบ หลังจากทำการค้นหาเรโซแนนซ์และตั้งค่าความถี่ในการทำงาน แอมพลิจูดของการสั่นสะเทือนอิสระของโพรบจะถูกนำมารวมเป็นหนึ่งเดียว
หากเครื่องสแกนไม่ขยายออกจนสุดก่อนหรือระหว่างเข้าใกล้ หรือโปรแกรมแสดงข้อความ: 'Error! โพรบอยู่ใกล้กับตัวอย่างมากเกินไป ตรวจสอบพารามิเตอร์วิธีการหรือโหนดทางกายภาพ คุณต้องการย้ายไปยังที่ปลอดภัย" ขอแนะนำให้ระงับขั้นตอนการเข้าถึงและ:
ก. เปลี่ยนหนึ่งในตัวเลือก:
เพิ่มปริมาณการโต้ตอบ พารามิเตอร์ การปราบปรามแอมพลิจูด, หรือ
เพิ่มมูลค่า ระบบปฏิบัติการที่ได้รับ, หรือ
เพิ่มเวลาหน่วงระหว่างขั้นตอนวิธีการ (พารามิเตอร์ เวลาบูรณาการในเพจ พารามิเตอร์แนวทางหน้าต่าง พารามิเตอร์).
ข. เพิ่มระยะห่างระหว่างปลายโพรบกับตัวอย่าง (ในการทำเช่นนี้ ให้ทำตามขั้นตอนที่อธิบายไว้ในย่อหน้าและดำเนินการ เสียงก้องจากนั้นกลับไปที่ขั้นตอน จัดหา.

ข้าว. 7 30. หน้าต่างสำหรับตั้งค่าการโต้ตอบระหว่างโพรบกับตัวอย่าง
หลังจากจับภาพการโต้ตอบ ข้อความ “ ตะกั่วเสร็จแล้ว”.
หากจำเป็นต้องขยับเข้าไปใกล้อีกขั้นหนึ่ง ให้กดปุ่ม ในกรณีนี้ ขั้นตอนจะถูกดำเนินการก่อน จากนั้นจึงตรวจสอบเกณฑ์สำหรับการจับภาพการโต้ตอบ หากต้องการหยุดการเคลื่อนไหว ให้กดปุ่ม ในการดำเนินการถอนกลับ คุณต้องกดปุ่มเพื่อการถอนกลับอย่างรวดเร็ว
หรือกดปุ่มเพื่อหดกลับช้า หากจำเป็น ให้ถอยกลับหนึ่งขั้นตอน กดปุ่ม ในกรณีนี้ ขั้นตอนจะถูกดำเนินการก่อน จากนั้นจึงตรวจสอบเกณฑ์สำหรับการจับภาพการโต้ตอบ
7. สแกน
หลังจากเสร็จสิ้นขั้นตอนวิธีการ ( จัดหา) และการจับภาพการโต้ตอบ การสแกนจะพร้อมใช้งาน (ปุ่มในหน้าต่างแผงควบคุมของแผงหน้าปัด)
โดยการกดปุ่มนี้ (มุมมองของหน้าต่างการสแกนจะแสดงในรูปที่ 7-31) ผู้ใช้จะไปยังการวัดโดยตรงและรับผลการวัด
ก่อนดำเนินการสแกน คุณต้องตั้งค่าพารามิเตอร์การสแกน ตัวเลือกเหล่านี้ถูกจัดกลุ่มไว้ที่ด้านขวาของแถบด้านบนของหน้าต่าง การสแกน.
ครั้งแรกหลังจากเริ่มโปรแกรม โปรแกรมจะถูกติดตั้งตามค่าเริ่มต้น:
พื้นที่สแกน - ภูมิภาค (Xนาโนเมตร*Yนาโนเมตร): 5000*5000นาโนเมตร;
จำนวนคะแนนการวัดตามแนวแกน- X, Y: NX=100, นิวยอร์ก=100;
สแกนเส้นทาง - ทิศทางกำหนดทิศทางการสแกน โปรแกรมให้คุณเลือกทิศทางของแกนสแกนแบบเร็ว (X หรือ Y) เมื่อโปรแกรมเริ่มทำงาน มันจะติดตั้ง ทิศทาง
หลังจากตั้งค่าพารามิเตอร์การสแกน คุณต้องคลิกปุ่ม นำมาใช้เพื่อยืนยันการป้อนพารามิเตอร์และปุ่ม เริ่มเพื่อเริ่มการสแกน

ข้าว. 7 31. หน้าต่างสำหรับจัดการกระบวนการและแสดงผลการสแกน CCM
7.4. แนวทางปฏิบัติ
อ่านคู่มือผู้ใช้ [Ref. 7-4].
7.5.ความปลอดภัย
อุปกรณ์นี้ใช้แรงดันไฟฟ้า 220 V ควรใช้กล้องจุลทรรศน์โพรบสแกน NanoEducator ตาม PTE และ PTB ของการติดตั้งระบบไฟฟ้าสำหรับผู้บริโภคที่มีแรงดันไฟฟ้าสูงถึง 1,000 V
7.6 ภารกิจ
1. เตรียมตัวอย่างทางชีววิทยาของคุณเองสำหรับการศึกษา SPM
2. ฝึกฝนการออกแบบทั่วไปของ NanoEducator
3. ทำความคุ้นเคยกับโปรแกรมควบคุม NanoEducator
4. รับภาพ SPM แรกภายใต้การดูแลของครู
5. ประมวลผลและวิเคราะห์ภาพที่ได้ แบคทีเรียรูปแบบใดที่ปกติสำหรับสารละลายของคุณ อะไรเป็นตัวกำหนดรูปร่างและขนาดของเซลล์แบคทีเรีย?
6. ใช้ Bacteria Key ของ Burgey และเปรียบเทียบผลลัพธ์กับที่อธิบายไว้ที่นั่น
7.7.คำถามควบคุม
1. วิธีการศึกษาวัตถุทางชีววิทยามีอะไรบ้าง?
2. กล้องจุลทรรศน์โพรบสแกนคืออะไร? หลักการอะไรรองรับมัน?
3. ตั้งชื่อองค์ประกอบหลักของ SPM และวัตถุประสงค์
4. เอฟเฟกต์เพียโซอิเล็กทริกคืออะไรและนำไปใช้อย่างไรใน SPM อธิบายการออกแบบเครื่องสแกนแบบต่างๆ
5. อธิบายการออกแบบทั่วไปของ NanoEducator
6. อธิบายเซ็นเซอร์แรงโต้ตอบและหลักการทำงานของเซ็นเซอร์
7. อธิบายกลไกในการเข้าใกล้โพรบไปยังตัวอย่างใน NanoEducator อธิบายพารามิเตอร์ที่กำหนดความแรงของการโต้ตอบระหว่างโพรบกับตัวอย่าง
8. อธิบายหลักการสแกนและการทำงานของระบบป้อนกลับ บอกเราเกี่ยวกับเกณฑ์ในการเลือกตัวเลือกการสแกน
7.8 วรรณคดี
ไฟ 7 1. พอล เดอ ครูย. นักล่าจุลินทรีย์ ม. เทอร์รา. 2544.
ไฟ 7 2. คู่มือการฝึกปฏิบัติทางจุลชีววิทยา ภายใต้กองบรรณาธิการของ Egorov N.S. มอสโก: เนาก้า, 1995.
ไฟ 7 3. Holt J. , Krieg N. , P. Sneath, J. Staley, S. Williams // ดีเทอร์มิแนนต์ของแบคทีเรียเบอร์กี M.: Mir, 1997. Vol. No. 2 C. 574.
ไฟ 7 4. คู่มือผู้ใช้เครื่องมือ NanoEducator.วัตถุ. นิจนีย์ นอฟโกรอด. ศูนย์วิทยาศาสตร์และการศึกษา...
บันทึกบรรยายในหลักสูตร "การสแกนด้วยกล้องจุลทรรศน์โพรบทางชีววิทยา" แผนการบรรยาย
เชิงนามธรรม... การสแกนโพรบกล้องจุลทรรศน์ทางชีววิทยา" แผนการบรรยาย : บทนำ ประวัติของ SPM. ขอบเขต แอปพลิเคชั่น... และโครงสร้างนาโน งานวิจัยชีวภาพวัตถุ: ผู้ได้รับรางวัลโนเบล... สำหรับงานวิจัยตัวอย่างเฉพาะ: B การสแกนโพรบกล้องจุลทรรศน์สำหรับ ...
โปรแกรมเบื้องต้นของการประชุมรัสเซีย xxiii เกี่ยวกับกล้องจุลทรรศน์อิเล็กตรอน 1 มิถุนายน เช้าวันอังคาร 10.00 – 14.00 น. พิธีเปิดการกล่าวแนะนำการประชุม
โปรแกรมบี.พี. Karadzhyan, ยู.แอล. อิวาโนวา, ยู.เอฟ. อิฟเลฟ, V.I. Popenko แอปพลิเคชันโพรบและคอนโฟคอล การสแกนกล้องจุลทรรศน์สำหรับงานวิจัยกระบวนการซ่อมแซมโดยใช้การปลูกถ่ายแบบกระจายนาโน...
วิธีการประชุมทางวิทยาศาสตร์ทั้งหมดของรัสเซียครั้งที่ 1 เพื่อศึกษาองค์ประกอบและโครงสร้างของวัสดุที่ใช้งานได้
เอกสารหลายองค์ประกอบ วัตถุไม่อ้างอิง... Lyakhov N.Z. งานวิจัยนาโนคอมโพสิต ทางชีวภาพแอคทีฟ... Aliev V.Sh. แอปพลิเคชันกระบวนการ โพรบกล้องจุลทรรศน์สำหรับงานวิจัยผล... การสแกนแคลอรี่และกระแสกระตุ้นความร้อน สำหรับงานวิจัย ...
อุปกรณ์แรกที่ทำให้สามารถสังเกตวัตถุนาโนและเคลื่อนย้ายวัตถุเหล่านั้นได้คือกล้องจุลทรรศน์โพรบสแกน - กล้องจุลทรรศน์แรงอะตอมและกล้องจุลทรรศน์อุโมงค์สแกนที่ทำงานบนหลักการที่คล้ายคลึงกัน Atomic force microscopy (AFM) ได้รับการพัฒนาโดย G. Binnig และ G. Rohrer ผู้ได้รับรางวัลโนเบลในปี 1986 จากการศึกษาเหล่านี้ การสร้างกล้องจุลทรรศน์แรงอะตอมที่สามารถสัมผัสได้ถึงแรงดึงดูดและแรงผลักที่เกิดขึ้นระหว่างอะตอมแต่ละตัว ทำให้ในที่สุด "รู้สึกและเห็น" วัตถุนาโนได้
รูปที่ 9 หลักการทำงานของกล้องจุลทรรศน์โพรบสแกน (นำมาจาก http://www.nanometer.ru/2007/06/06/atomno_silovaa_mikroskopia_2609.html#) เส้นประแสดงเส้นทางของลำแสงเลเซอร์ คำอธิบายอื่น ๆ ในข้อความ
พื้นฐานของ AFM (ดูรูปที่ 9) คือโพรบซึ่งมักทำจากซิลิกอนและเป็นตัวแทนของแผ่นคอนโซลบาง ๆ (เรียกว่า cantilever จากคำภาษาอังกฤษ "cantilever" - console, beam) ที่ปลายเสาเข็ม (ความยาว » 500 µm ความกว้าง » 50 µm ความหนา » 1 µm) มีหนามแหลมที่แหลมมาก (ความยาว » 10 µm รัศมีความโค้งตั้งแต่ 1 ถึง 10 nm) สิ้นสุดในกลุ่มหนึ่งหรือ อะตอมมากขึ้น (ดูรูปที่ 10)
รูปที่ 10 ไมโครโฟโตกราฟีอิเล็กตรอนของโพรบเดียวกัน ถ่ายด้วยกำลังขยายต่ำ (บนสุด) และกำลังขยายสูง
ขณะที่ไมโครโพรบเคลื่อนที่ไปตามพื้นผิวของตัวอย่าง ปลายแหลมจะขึ้นและลง โดยสรุปภาพไมโครรีลีฟของพื้นผิว เช่นเดียวกับเข็มแผ่นเสียงเลื่อนผ่านแผ่นเสียง ที่ส่วนปลายยื่นออกมาของคานยื่น (เหนือยอดแหลม ดูรูปที่ 9) มีแท่นกระจกซึ่งลำแสงเลเซอร์ตกลงมาและสะท้อนออกมา เมื่อสไปค์เลื่อนขึ้นและสูงขึ้นบนพื้นผิวที่ไม่เรียบ ลำแสงที่สะท้อนกลับเบี่ยงเบนไป และการเบี่ยงเบนนี้จะถูกบันทึกโดยเครื่องตรวจจับแสง และแรงที่เข็มจะดึงดูดไปยังอะตอมใกล้เคียงจะถูกบันทึกโดยเซ็นเซอร์เพียโซอิเล็กทริก
ข้อมูลจาก photodetector และเซ็นเซอร์ piezoelectric ถูกใช้ในระบบป้อนกลับที่สามารถให้ค่าคงที่ เช่น ค่าคงที่ของแรงปฏิสัมพันธ์ระหว่างไมโครโพรบและพื้นผิวของตัวอย่าง ด้วยเหตุนี้ จึงเป็นไปได้ที่จะสร้างการบรรเทาพื้นผิวตัวอย่างสามมิติแบบเรียลไทม์ ความละเอียดของวิธี AFM อยู่ที่ประมาณ 0.1-1 นาโนเมตรในแนวนอนและ 0.01 นาโนเมตรในแนวตั้ง ภาพของแบคทีเรีย Escherichia coli ที่ได้รับโดยใช้กล้องจุลทรรศน์โพรบสแกนจะแสดงในรูปที่ สิบเอ็ด
รูปที่ 11 แบคทีเรีย E. coli ( Escherichia coli). ได้ภาพโดยใช้กล้องจุลทรรศน์โพรบสแกน แบคทีเรียมีความยาว 1.9 µm และกว้าง 1 µm ความหนาของแฟลเจลลาและซีเลียคือ 30 นาโนเมตรและ 20 นาโนเมตรตามลำดับ
กล้องจุลทรรศน์โพรบสแกนอีกกลุ่มหนึ่งใช้ "เอฟเฟกต์อุโมงค์" ที่เรียกว่ากลไกควอนตัมเพื่อสร้างภูมิประเทศพื้นผิว สาระสำคัญของเอฟเฟกต์อุโมงค์คือกระแสไฟฟ้าระหว่างเข็มโลหะแหลมคมกับพื้นผิวที่ระยะห่างประมาณ 1 นาโนเมตรเริ่มขึ้นอยู่กับระยะทางนี้ - ยิ่งระยะห่างน้อย กระแสก็จะยิ่งมากขึ้น หากใช้แรงดันไฟฟ้า 10 V ระหว่างเข็มกับพื้นผิว กระแส "อุโมงค์" นี้สามารถมีค่าตั้งแต่ 10 pA ถึง 10 nA โดยการวัดกระแสนี้และทำให้คงที่ ระยะห่างระหว่างเข็มกับพื้นผิวสามารถคงที่ได้ สิ่งนี้ช่วยให้คุณสร้างโปรไฟล์พื้นผิวสามมิติได้ (ดูรูปที่ 12) ต่างจากกล้องจุลทรรศน์แรงอะตอม กล้องจุลทรรศน์แบบส่องกราดแบบอุโมงค์สามารถศึกษาพื้นผิวของโลหะหรือเซมิคอนดักเตอร์เท่านั้น
รูปที่ 12 เข็มของกล้องจุลทรรศน์แบบส่องกราดแบบอุโมงค์ซึ่งอยู่ในระยะคงที่ (ดูลูกศร) เหนือชั้นของอะตอมของพื้นผิวที่กำลังศึกษา
กล้องจุลทรรศน์แบบอุโมงค์สแกนยังสามารถใช้เพื่อย้ายอะตอมไปยังจุดที่ผู้ปฏิบัติงานเลือก ตัวอย่างเช่น หากแรงดันไฟฟ้าระหว่างปลายกล้องจุลทรรศน์กับพื้นผิวของตัวอย่างมีมากกว่าความจำเป็นในการศึกษาพื้นผิวนี้ อะตอมของตัวอย่างที่อยู่ใกล้ที่สุดจะกลายเป็นไอออนและ "กระโดด" ลงบนเข็ม หลังจากนั้น โดยการขยับเข็มเล็กน้อยและเปลี่ยนแรงดันไฟฟ้า อะตอมที่หลุดรอดออกมาสามารถ "กระโดด" กลับไปที่พื้นผิวของตัวอย่างได้ ดังนั้นจึงเป็นไปได้ที่จะจัดการอะตอมและสร้างโครงสร้างนาโนเช่น โครงสร้างบนพื้นผิวซึ่งมีขนาดเป็นนาโนเมตร ย้อนกลับไปในปี 1990 พนักงานของ IBM แสดงให้เห็นว่าสิ่งนี้เป็นไปได้โดยการเพิ่มชื่อบริษัทของพวกเขาบนแผ่นนิกเกิลจากอะตอมของซีนอน 35 อะตอม (ดูรูปที่ 13)
รูปที่ 13 อะตอมของซีนอน 35 อะตอมบนแผ่นนิกเกิล ชื่อบริษัท IBM ซึ่งผลิตโดยพนักงานของบริษัทนี้โดยใช้กล้องจุลทรรศน์โพรบสแกนในปี 1990
การใช้กล้องจุลทรรศน์โพรบ ไม่เพียงแต่เคลื่อนที่อะตอมเท่านั้น แต่ยังสร้างข้อกำหนดเบื้องต้นสำหรับการจัดระเบียบตนเองด้วย ตัวอย่างเช่น หากมีหยดน้ำที่มีไทออลไอออนอยู่บนแผ่นโลหะ หัววัดด้วยกล้องจุลทรรศน์จะส่งเสริมการวางแนวของโมเลกุลเหล่านี้ ซึ่งหางไฮโดรคาร์บอนทั้งสองจะหันออกจากเพลต เป็นผลให้สามารถสร้างโมโนเลเยอร์ของโมเลกุลไทออลที่เกาะติดกับแผ่นโลหะได้ (ดูรูปที่ 14) วิธีการสร้างโมโนเลเยอร์ของโมเลกุลบนพื้นผิวโลหะนี้เรียกว่า "pen nanolithography"
รูปที่ 14. ด้านซ้ายบน - คานยื่น (เหล็กสีเทา) ของกล้องจุลทรรศน์โพรบสแกนเหนือแผ่นโลหะ ทางด้านขวาเป็นภาพขยายของพื้นที่ (วงกลมสีขาวในรูปด้านซ้าย) ใต้โพรบคานยื่น ซึ่งแสดงแผนผังแสดงโมเลกุลของไทออลที่มีหางไฮโดรคาร์บอนสีม่วงเรียงกันเป็นชั้นเดียวที่ปลายโพรบ ดัดแปลงจาก Scientific American, 2001, Sept., p. 44.
กล้องจุลทรรศน์โพรบสแกน
ทิศทางที่อายุน้อยที่สุดและในเวลาเดียวกันในการศึกษาคุณสมบัติพื้นผิวคือการสแกนด้วยกล้องจุลทรรศน์โพรบ กล้องจุลทรรศน์โพรบมีความละเอียดบันทึกน้อยกว่า 0.1 นาโนเมตร พวกเขาสามารถวัดการทำงานร่วมกันระหว่างพื้นผิวและปลายด้วยกล้องจุลทรรศน์ที่สแกน - โพรบ - และแสดงภาพสามมิติบนหน้าจอคอมพิวเตอร์
วิธีการด้วยกล้องจุลทรรศน์โพรบไม่เพียงแต่ทำให้มองเห็นอะตอมและโมเลกุลเท่านั้น แต่ยังมีอิทธิพลต่อพวกมันด้วย ในกรณีนี้ สิ่งที่สำคัญอย่างยิ่งคือ วัตถุสามารถศึกษาได้ไม่จำเป็นในสุญญากาศ (ซึ่งเป็นเรื่องปกติสำหรับกล้องจุลทรรศน์อิเล็กตรอน) แต่ยังรวมถึงในก๊าซและของเหลวต่างๆ ด้วย
กล้องจุลทรรศน์แบบอุโมงค์เพื่อสแกนหัวโพรบถูกประดิษฐ์ขึ้นในปี 1981 โดย G. Binning และ H. Rohrer (สหรัฐอเมริกา) พนักงานของ IBM Research Center ห้าปีต่อมา พวกเขาได้รับรางวัลโนเบลสำหรับการประดิษฐ์นี้
Binning และ Rohrer พยายามออกแบบอุปกรณ์เพื่อศึกษาพื้นที่ผิวที่เล็กกว่า 10 นาโนเมตร ผลลัพธ์ที่ได้เกินความคาดหมายที่สุด: นักวิทยาศาสตร์สามารถเห็นอะตอมแต่ละตัวซึ่งมีขนาดประมาณหนึ่งนาโนเมตร การทำงานของกล้องจุลทรรศน์สแกนอุโมงค์ขึ้นอยู่กับปรากฏการณ์ทางกลควอนตัมที่เรียกว่าเอฟเฟกต์อุโมงค์ ปลายโลหะที่บางมาก - หัววัดที่มีประจุลบ - ถูกนำไปยังตัวอย่างใกล้กับตัวอย่าง รวมทั้งโลหะซึ่งมีประจุบวกด้วย ในขณะนั้นเมื่อระยะห่างระหว่างทั้งสองถึงระยะทางระหว่างอะตอมหลายระยะ อิเล็กตรอนจะเริ่มผ่านมันอย่างอิสระ - "อุโมงค์": กระแสจะไหลผ่านช่องว่าง
การพึ่งพาอาศัยกันอย่างมากของความแรงกระแสของอุโมงค์ในระยะห่างระหว่างส่วนปลายกับพื้นผิวของตัวอย่างมีความสำคัญมากสำหรับการทำงานของกล้องจุลทรรศน์ หากช่องว่างลดลงเพียง 0.1 นาโนเมตร กระแสจะเพิ่มขึ้นประมาณ 10 เท่า ดังนั้นแม้แต่ความผิดปกติของขนาดของอะตอมก็ทำให้เกิดความผันผวนของขนาดของกระแสที่เห็นได้ชัดเจน
เพื่อให้ได้ภาพ หัววัดจะสแกนพื้นผิวและระบบอิเล็กทรอนิกส์จะอ่านกระแสไฟฟ้า ขึ้นอยู่กับการเปลี่ยนแปลงของค่านี้ ทิปจะลดลงหรือเพิ่มขึ้น ดังนั้นระบบจะรักษาค่าของค่าคงที่ในปัจจุบันและวิถีการเคลื่อนที่ของส่วนปลายจะเป็นไปตามการบรรเทาของพื้นผิวโดยโค้งไปรอบ ๆ เนินเขาและความหดหู่ใจ
ทิปจะเคลื่อนเครื่องเพียโซสแกนเนอร์ ซึ่งเป็นอุปกรณ์ควบคุมที่ทำจากวัสดุที่สามารถเปลี่ยนแปลงได้ภายใต้อิทธิพลของแรงดันไฟฟ้า เครื่องสแกนเพียโซส่วนใหญ่มักจะอยู่ในรูปของหลอดที่มีอิเล็กโทรดหลายอันที่ยืดหรือโค้งงอ โดยจะเคลื่อนโพรบไปในทิศทางต่างๆ ด้วยความแม่นยำหนึ่งในพันของนาโนเมตร
ข้อมูลเกี่ยวกับการเคลื่อนไหวของส่วนปลายจะถูกแปลงเป็นรูปภาพของพื้นผิว ซึ่งสร้างขึ้นทีละจุดบนหน้าจอ เพื่อความชัดเจน ส่วนของความสูงต่างกันจะถูกทาสีด้วยสีที่ต่างกัน
ตามหลักการแล้ว ควรมีอะตอมที่ไม่สามารถเคลื่อนที่ได้หนึ่งอะตอมที่ส่วนปลายของโพรบ หากมีส่วนยื่นออกมาหลายครั้งที่ปลายเข็ม ภาพอาจเพิ่มขึ้นเป็นสองเท่าหรือสามเท่า เพื่อขจัดข้อบกพร่อง เข็มจะถูกกัดกรด ทำให้ได้รูปทรงตามต้องการ
ด้วยความช่วยเหลือของกล้องจุลทรรศน์แบบเจาะอุโมงค์ จึงมีการค้นพบหลายอย่าง ตัวอย่างเช่น พวกเขาพบว่าอะตอมบนพื้นผิวของผลึกมีการจัดเรียงตัวแตกต่างจากภายใน และมักสร้างโครงสร้างที่ซับซ้อน
ด้วยความช่วยเหลือของกล้องจุลทรรศน์แบบอุโมงค์สามารถศึกษาได้เฉพาะวัตถุที่เป็นสื่อกระแสไฟฟ้าเท่านั้น อย่างไรก็ตาม ยังช่วยให้สังเกตไดอิเล็กทริกแบบบางในรูปแบบของฟิล์มได้เมื่อวางบนพื้นผิวของวัสดุนำไฟฟ้า และถึงแม้ว่าผลกระทบนี้จะยังไม่ได้รับการอธิบายอย่างครบถ้วน แต่ก็ประสบความสำเร็จในการศึกษาภาพยนตร์อินทรีย์และวัตถุทางชีววิทยามากมาย เช่น โปรตีน ไวรัส
ความเป็นไปได้ของกล้องจุลทรรศน์นั้นยอดเยี่ยม ด้วยความช่วยเหลือของเข็มกล้องจุลทรรศน์ ภาพวาดจะถูกนำไปใช้กับแผ่นโลหะ เมื่อต้องการทำเช่นนี้ อะตอมแต่ละตัวจะถูกใช้เป็นวัสดุ "การเขียน" - พวกมันถูกวางบนพื้นผิวหรือนำออกจากอะตอม ดังนั้นในปี 1991 พนักงานของ IBM ได้เขียนอะตอมของซีนอนบนพื้นผิวของแผ่นนิกเกิลโดยใช้ชื่อบริษัทของพวกเขาคือ IBM ตัวอักษร "I" ประกอบด้วยอะตอมเพียง 9 อะตอม และตัวอักษร "B" และ "M" - 13 อะตอม
ขั้นตอนต่อไปในการพัฒนากล้องจุลทรรศน์โพรบสแกนดำเนินการในปี 2529 โดย Binning, Kveit และ Gerber พวกเขาสร้างกล้องจุลทรรศน์แรงปรมาณู หากในกล้องจุลทรรศน์แบบอุโมงค์ มีบทบาทชี้ขาดโดยอาศัยกระแสของอุโมงค์ในระยะห่างระหว่างโพรบกับตัวอย่างที่คมชัด ดังนั้นสำหรับกล้องจุลทรรศน์แรงปรมาณู การพึ่งพาแรงของปฏิกิริยาระหว่างวัตถุในระยะห่างระหว่างกันจะเป็นของ ความสำคัญอย่างยิ่ง
โพรบของกล้องจุลทรรศน์แรงปรมาณูเป็นแผ่นยืดหยุ่นขนาดเล็ก - เสาเข็ม ยิ่งไปกว่านั้น ปลายด้านหนึ่งได้รับการแก้ไข ในขณะที่ปลายอีกด้านของปลายโพรบถูกสร้างขึ้นจากวัสดุที่เป็นของแข็ง - ซิลิกอนหรือซิลิกอนไนไตรด์ เมื่อโพรบเคลื่อนที่ แรงของปฏิกิริยาระหว่างอะตอมกับพื้นผิวที่ไม่เรียบของตัวอย่างจะทำให้เพลตงอ ด้วยการเคลื่อนที่ของโพรบดังกล่าว เมื่อการโก่งตัวคงที่ เป็นไปได้ที่จะได้ภาพโปรไฟล์พื้นผิว โหมดการทำงานของกล้องจุลทรรศน์นี้เรียกว่าโหมดสัมผัส ทำให้สามารถวัดได้โดยใช้ความละเอียดเศษส่วนของนาโนเมตร ไม่เพียงแต่การบรรเทาเท่านั้น แต่ยังรวมถึงแรงเสียดทาน ความยืดหยุ่น และความหนืดของวัตถุที่กำลังศึกษาอยู่ด้วย
การสแกนเมื่อสัมผัสกับตัวอย่างมักจะนำไปสู่การเสียรูปและการทำลาย ผลกระทบของโพรบบนพื้นผิวอาจมีประโยชน์ เช่น ในการผลิตไมโครเซอร์กิต อย่างไรก็ตาม โพรบสามารถทำลายฟิล์มโพลีเมอร์บาง ๆ หรือสร้างความเสียหายให้กับแบคทีเรียได้ง่าย ทำให้ตายได้ เพื่อหลีกเลี่ยงปัญหานี้ คานเท้าแขนถูกนำเข้าสู่การสั่นแบบเรโซแนนซ์ใกล้พื้นผิว และบันทึกการเปลี่ยนแปลงแอมพลิจูด ความถี่ หรือเฟสของการสั่นที่เกิดจากปฏิกิริยากับพื้นผิว วิธีนี้ทำให้สามารถศึกษาจุลชีพที่มีชีวิตได้: เข็มสั่นทำหน้าที่กับแบคทีเรียเหมือนการนวดเบาๆ โดยไม่ก่อให้เกิดอันตราย และช่วยให้คุณสังเกตการเคลื่อนไหว การเจริญเติบโต และการแบ่งตัวของแบคทีเรียได้
ในปี 1987 I. Martin และ K. Vikrama-singh (USA) แนะนำให้ใช้ microneedle แบบแม่เหล็กเป็นปลายแหลม ผลที่ได้คือกล้องจุลทรรศน์แรงแม่เหล็ก
กล้องจุลทรรศน์ดังกล่าวช่วยให้มองเห็นบริเวณแม่เหล็กแต่ละส่วนในวัสดุ - โดเมน - ขนาดสูงสุด 10 นาโนเมตร นอกจากนี้ยังใช้สำหรับการบันทึกข้อมูลที่มีความหนาแน่นสูงโดยการสร้างโดเมนบนพื้นผิวฟิล์มโดยใช้เข็มและแม่เหล็กถาวร การบันทึกดังกล่าวมีความหนาแน่นมากกว่าแผ่นแม่เหล็กและออปติคัลสมัยใหม่หลายร้อยเท่า
ในตลาดโลกของไมโครกลศาสตร์ซึ่งมียักษ์ใหญ่อย่าง IBM, Hitachi, Gillette, Polaroid, Olympus, Joyle, Digital Instruments เป็นผู้รับผิดชอบก็มีสถานที่สำหรับรัสเซียเช่นกัน เสียงของ MDT บริษัท เล็ก ๆ จาก Zelenograd ใกล้มอสโกได้ยินดังขึ้นเรื่อย ๆ
Denis Shabratov หัวหน้านักเทคโนโลยีกล่าวว่า "เรามาลอกแบบลงบนจานกันเถอะ ซึ่งเล็กกว่าผมมนุษย์ถึง 10 เท่า ซึ่งเป็นภาพวาดหินที่สร้างโดยบรรพบุรุษที่อยู่ห่างไกลของเรา" - คอมพิวเตอร์ควบคุม "แปรง" หัววัด - เข็มยาว 15 ไมครอน เส้นผ่านศูนย์กลางหนึ่งร้อยไมครอน เข็มจะเคลื่อนที่ไปตาม "ผืนผ้าใบ" และบริเวณที่สัมผัสนั้น จะเกิดรอยเปื้อนขนาดเท่าอะตอม ค่อยๆ กวางปรากฏขึ้นบนหน้าจอ ตามด้วยผู้ขับขี่
MDT เป็นผู้ผลิตไมโครสโคปและโพรบโพรบเพียงรายเดียวในประเทศ เธอเป็นหนึ่งในสี่ผู้นำของโลก ผลิตภัณฑ์ของบริษัทซื้อในสหรัฐอเมริกา ญี่ปุ่น ยุโรป
และทั้งหมดเริ่มต้นด้วยข้อเท็จจริงที่ว่า Denis Shabratov และ Arkady Gologanov วิศวกรรุ่นเยาว์ของหนึ่งในสถาบัน Zelenograd ที่ตกอยู่ในภาวะวิกฤต โดยคิดว่าจะใช้ชีวิตต่อไปอย่างไร เลือกไมโครเครื่องกล พวกเขาถือว่านี่เป็นแนวทางที่มีแนวโน้มดีที่สุดโดยไม่มีเหตุผล
“เราไม่มีสิ่งที่ซับซ้อนที่เราจะต้องแข่งขันกับคู่แข่งที่แข็งแกร่ง” Gologanov เล่า – แน่นอน อุปกรณ์ของเราด้อยกว่าของนำเข้า แต่ในทางกลับกัน มันบังคับให้คนๆ หนึ่งมีไหวพริบ เพื่อใช้สมอง และพวกเขาก็ไม่เลวร้ายไปกว่าเราอย่างแน่นอน และความพร้อมในการไถให้มากเกินพอ พวกเขาทำงานทั้งวันทั้งคืนไม่มีวันหยุด สิ่งที่ยากที่สุดคือไม่ทำโพรบ superminiature แต่ขายมัน เรารู้ว่าของเราดีที่สุดในโลก เราตะโกนเกี่ยวกับมันบนอินเทอร์เน็ต โจมตีลูกค้าด้วยแฟกซ์ พูดง่ายๆ ว่าเตะขาของเราเหมือนกบตัวนั้น - ไม่ต้องสนใจเลย
เมื่อพวกเขารู้ว่าหนึ่งในผู้นำในการผลิตกล้องจุลทรรศน์คือบริษัท Joyle ของญี่ปุ่น กำลังมองหาเข็มที่มีรูปร่างซับซ้อนมาก พวกเขาตระหนักว่านี่เป็นโอกาสของพวกเขา การสั่งซื้อมีค่าใช้จ่ายมากของความแข็งแกร่งและเส้นประสาท แต่ได้รับเล็กน้อย แต่เงินไม่ใช่สิ่งสำคัญ ตอนนี้พวกเขาสามารถพูดได้เต็มปากว่า Joyle ที่มีชื่อเสียงคือลูกค้าของเรา ในทำนองเดียวกัน เป็นเวลาเกือบครึ่งปี MDT ได้ผลิตโพรบพิเศษสำหรับสถาบันมาตรฐานและเทคโนโลยีแห่งสหรัฐอเมริกาโดยไม่คิดค่าใช้จ่าย และชื่อใหญ่ใหม่ก็ปรากฏในรายชื่อลูกค้า
“ตอนนี้คำสั่งไหลลื่นจนเราไม่สามารถทำให้ทุกคนพอใจได้อีกต่อไป” ชาบราตอฟกล่าว - อนิจจานี่คือความจำเพาะของรัสเซีย ประสบการณ์แสดงให้เห็นว่ามันสมเหตุสมผลสำหรับเราที่จะผลิตผลิตภัณฑ์ที่เน้นวิทยาศาสตร์ในปริมาณน้อย ในขณะที่การผลิตจำนวนมากควรตั้งขึ้นในต่างประเทศ โดยที่วัสดุสิ้นเปลืองจะไม่หยุดชะงัก คุณภาพต่ำ และผู้รับเหมาช่วงที่เป็นตัวเลือก”
การเกิดขึ้นของกล้องจุลทรรศน์โพรบสแกนประสบความสำเร็จพร้อมกับการเริ่มต้นของการพัฒนาอย่างรวดเร็วของเทคโนโลยีคอมพิวเตอร์ เปิดโอกาสใหม่ ๆ สำหรับการใช้กล้องจุลทรรศน์โพรบ ในปี 2541 ได้มีการสร้างแบบจำลองของกล้องจุลทรรศน์โพรบสแกน FemtoScan-001 ขึ้นที่ศูนย์เทคโนโลยีขั้นสูง (มอสโก) ซึ่งควบคุมผ่านทางอินเทอร์เน็ตเช่นกัน ในตอนนี้ ไม่ว่าที่ใดในโลก นักวิจัยก็จะสามารถใช้กล้องจุลทรรศน์ได้ และใครก็ตามที่ต้องการสามารถ "มอง" เข้าไปในโลกขนาดเล็กได้โดยไม่ต้องออกจากคอมพิวเตอร์
วันนี้กล้องจุลทรรศน์ดังกล่าวใช้ในการวิจัยทางวิทยาศาสตร์เท่านั้น ด้วยความช่วยเหลือของพวกเขา การค้นพบที่น่าตื่นเต้นที่สุดในพันธุศาสตร์และการแพทย์จึงถูกสร้างขึ้น วัสดุที่มีคุณสมบัติที่น่าทึ่งจึงถูกสร้างขึ้น อย่างไรก็ตาม คาดว่าจะมีการพัฒนาในอนาคตอันใกล้นี้ โดยเฉพาะในด้านการแพทย์และไมโครอิเล็กทรอนิกส์ ไมโครโรบอทจะปรากฏขึ้น ส่งยาผ่านหลอดเลือดโดยตรงไปยังอวัยวะที่เป็นโรค ซูเปอร์คอมพิวเตอร์ขนาดเล็กจะถูกสร้างขึ้น
จากหนังสือ 100 สุดยอดสิ่งประดิษฐ์ ผู้เขียน Ryzhov Konstantin Vladislavovich28. MICROSCOPE ในเวลาเดียวกันกับที่การสำรวจอวกาศด้วยความช่วยเหลือของกล้องโทรทรรศน์เริ่มต้นขึ้นความพยายามครั้งแรกในการเปิดเผยความลับของพิภพเล็ก ๆ ด้วยเลนส์ เป็นที่ทราบกันว่าวัตถุขนาดเล็กแม้ว่าจะมีแสงสว่างเพียงพอก็ส่ง ลำแสงที่อ่อนเกินไปต่อตา
จากหนังสือสารานุกรมแห่งสหภาพโซเวียตผู้ยิ่งใหญ่ (IO) ของผู้แต่ง TSB จากหนังสือสารานุกรมแห่งสหภาพโซเวียตผู้ยิ่งใหญ่ (MI) ของผู้แต่ง TSB จากหนังสือ Great Soviet Encyclopedia (TE) ของผู้แต่ง TSB จากหนังสือ Great Soviet Encyclopedia (EL) ของผู้แต่ง TSB จากหนังสือ ทุกเรื่อง. เล่ม 2 ผู้เขียน Likum Arkady จากหนังสือเสียดสีโซเวียต 2460-2506 ผู้เขียน Stykalin Sergey Ilyich จากหนังสือ 100 สิ่งประดิษฐ์ชื่อดัง ผู้เขียน Pristinsky Vladislav Leonidovich จากหนังสือ Great Encyclopedia of Technology ผู้เขียน ทีมงานผู้เขียนใครเป็นผู้คิดค้นกล้องจุลทรรศน์? คำว่า "กล้องจุลทรรศน์" มาจากภาษากรีก: ส่วนแรกหมายถึง "เล็ก" ส่วนที่สอง - "ผู้สังเกตการณ์" ดังนั้น "กล้องจุลทรรศน์" จึงเป็นผู้สังเกตการณ์สิ่งเล็กๆ น้อยๆ เป็นเครื่องมือที่ใช้ดูวัตถุเล็กๆ ไม่ใช่
จากหนังสือ Who's Who in the World of Discoveries and Inventions ผู้เขียน Sitnikov Vitaly Pavlovich* นิตยสารเหน็บแนม MICROSCOPE ตีพิมพ์ใน Novo-Nikolaevsk (ปัจจุบันคือ Novosibirsk) ในปี 1922 (ที่มา: Siberian Sov. Encycl., Vol. I, p.
จากหนังสือของผู้เขียน จากหนังสือของผู้เขียนกล้องจุลทรรศน์ กล้องจุลทรรศน์เป็นอุปกรณ์ออปติคัลที่ออกแบบมาเพื่อให้ได้ภาพที่ขยายใหญ่ขึ้นของวัตถุใด ๆ หรือรายละเอียดของโครงสร้างของวัตถุเหล่านี้ซึ่งไม่สามารถมองเห็นได้ด้วยตาเปล่า โดยทั่วไป กล้องจุลทรรศน์เป็นระบบที่ประกอบด้วยเลนส์ 2 ตัวแต่
จากหนังสือของผู้เขียนกล้องจุลทรรศน์เอ็กซ์เรย์ กล้องจุลทรรศน์เอ็กซ์เรย์เป็นอุปกรณ์ที่ตรวจสอบโครงสร้างและโครงสร้างของวัตถุด้วยกล้องจุลทรรศน์โดยใช้รังสีเอกซ์ กล้องจุลทรรศน์เอกซเรย์มีขีดจำกัดความละเอียดที่สูงกว่ากล้องจุลทรรศน์แบบใช้แสงเพราะ
จากหนังสือของผู้เขียนกล้องจุลทรรศน์ไอออน กล้องจุลทรรศน์ไอออนเป็นเครื่องมือที่ใช้ลำไอออนที่เกิดจากการปล่อยก๊าซหรือแหล่งกำเนิดไอออนความร้อนเพื่อให้ได้ภาพ หลักการทำงานของกล้องจุลทรรศน์อิออนคล้ายกับกล้องจุลทรรศน์อิเล็กตรอน ผ่านวัตถุและ
จากหนังสือของผู้เขียนกล้องจุลทรรศน์ กล้องจุลทรรศน์เป็นอุปกรณ์ออปติคัลที่ช่วยให้คุณได้รับภาพของวัตถุที่มองไม่เห็นด้วยตาเปล่า ใช้สำหรับสังเกตจุลินทรีย์ เซลล์ ผลึก โครงสร้างโลหะผสม ด้วยความแม่นยำ 0.20 ไมครอน ความละเอียดของกล้องจุลทรรศน์นี้มีขนาดเล็กที่สุด
จากหนังสือของผู้เขียนใครเป็นผู้คิดค้นกล้องจุลทรรศน์? คำว่า "กล้องจุลทรรศน์" มาจากภาษากรีก: ส่วนแรกหมายถึง "เล็ก" ส่วนที่สอง - "ผู้สังเกตการณ์" ดังนั้น "กล้องจุลทรรศน์" จึงเป็นผู้สังเกตการณ์สิ่งเล็กๆ น้อยๆ เป็นเครื่องมือที่ใช้ตรวจสอบวัตถุเล็กๆ ไม่ใช่
 การเลือกโปรแกรมประมวลผล GIS
การเลือกโปรแกรมประมวลผล GIS การคำนวณและวิเคราะห์วงจรไฟฟ้ากระแสสลับ
การคำนวณและวิเคราะห์วงจรไฟฟ้ากระแสสลับ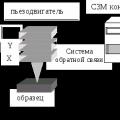 กล้องจุลทรรศน์โพรบสแกน สถานะปัจจุบันและการพัฒนาของกล้องจุลทรรศน์โพรบสแกน
กล้องจุลทรรศน์โพรบสแกน สถานะปัจจุบันและการพัฒนาของกล้องจุลทรรศน์โพรบสแกน