ประกาศนียบัตร: การออกแบบเครือข่าย LAN การคำนวณความยาวสูงสุดของการสื่อสารด้วยแสงของโทรศัพท์บริการที่จัดโดยใช้โทรศัพท์ใยแก้วนำแสง
ขณะเตรียมบทความที่มีคำถามซับซ้อน ฉันพบคำถามที่น่าสนใจ - ขีดจำกัดความยาว 100 เมตรของส่วนอีเทอร์เน็ตมาจากไหน ฉันต้องดำดิ่งลึกลงไปในฟิสิกส์และตรรกะของกระบวนการเพื่อให้เข้าใจมากขึ้น มักกล่าวกันว่าด้วยสายเคเบิลที่มีความยาว การลดทอนเริ่มต้นและข้อมูลจะบิดเบี้ยว และโดยทั่วไปแล้ว นี่เป็นเรื่องจริง แต่มีเหตุผลอื่นสำหรับเรื่องนี้เช่นกัน เราจะพยายามพิจารณาพวกเขาในบทความนี้
CSMA/CD
เหตุผลอยู่ในเทคโนโลยี CSMA / CD - Carrier Sense Multiple Access พร้อมการตรวจจับการชน. ถ้าจู่ๆ ก็มีคนไม่รู้ แสดงว่าเรามีบัสหนึ่งบัส (สื่อส่งข้อมูลหนึ่งตัว) ซึ่งเชื่อมต่อหลายสถานี ( เข้าได้หลายทาง). แต่ละสถานีตรวจสอบสถานะของบัส - ไม่ว่าจะมีสัญญาณจากสถานีอื่นหรือไม่ ( ความรู้สึกของผู้ให้บริการ). หากจู่ๆ อุปกรณ์สองเครื่องเริ่มส่งสัญญาณพร้อมกัน ทั้งคู่ควรตรวจจับมัน ( การตรวจจับการชน). ใช่ ทั้งหมดนี้ใช้กับเครือข่ายฮาล์ฟดูเพล็กซ์ ดังนั้น หากดวงตาของคุณจดจ่ออยู่กับอนาคต 10 กิกะบิตที่สดใสโดยเฉพาะ บทความนี้ไม่เหมาะสำหรับคุณ ก่อนอื่น ฉันต้องการให้ทุกคนเข้าใจว่าความเร็วของสัญญาณในตัวกลางไม่ได้ขึ้นอยู่กับมาตรฐานที่เกี่ยวข้องแต่อย่างใด แม้แต่ในอีเธอร์เน็ต (10Mb / s) แม้แต่ในอีเธอร์เน็ต 10Gbit ความเร็วของการแพร่กระจายพัลส์ในสายเคเบิลทองแดงนั้นอยู่ที่ประมาณ 2/3 ของความเร็วแสง เจ๋งแค่ไหนที่พวกเขาเขียนในหัวข้อ holivar เดียว: คุณสามารถพูดเร็วหรือช้าได้ แต่ความเร็วของเสียงไม่เปลี่ยนแปลงจากสิ่งนี้ ตอนนี้ มาดูแก่นแท้ของ CSMA/CD กัน ในเครือข่ายสมัยใหม่ จะไม่รวมการชนกัน เนื่องจากเราไม่มีบัสทั่วไปแล้ว และอุปกรณ์เกือบทั้งหมดทำงานในโหมดฟูลดูเพล็กซ์ นั่นคือ เรามีเพียงสองโหนดที่ปลายสายเคเบิลเส้นเดียวและแยกคู่สำหรับรับและส่งสัญญาณ ดังนั้นกลไก CSMA/CD จึงไม่ปรากฏใน 10Gbit Ethernet อีกต่อไป อย่างไรก็ตาม มันจะมีประโยชน์ในการพิจารณา เช่น ในการศึกษา RIP ซึ่งดูเหมือนว่าไม่มีใครต้องการอีกต่อไป แต่แสดงให้เห็นได้อย่างสมบูรณ์ถึงหลักการทำงานของโปรโตคอลการกำหนดเส้นทางเวกเตอร์ระยะทาง สมมติว่าเรามีอุปกรณ์ 3 เครื่องที่เชื่อมต่อกับบัสทั่วไป PC 1 เริ่มส่งข้อมูลไปยัง PC3 (เปิดพัลส์บนบัส) แน่นอน ในรถโดยสารประจำทาง สัญญาณจะไม่เพียงส่งไปยัง PC3 เท่านั้น แต่ยังส่งถึงทุกคนในแถวเดียวกันด้วย PC2 ก็อยากจะส่งสัญญาณเช่นกัน แต่เห็นความปั่นป่วนในสายเคเบิลและรอ เมื่อสัญญาณจาก PC1 ถึง PC3 ผ่านไป PC2 ก็สามารถเริ่มส่งสัญญาณได้
นี่คือตัวอย่างการทำงานของ Carrier Sense PC2 ไม่ส่งสัญญาณจนกว่าจะเห็นสัญญาณบนสายตอนนี้สถานการณ์แตกต่างกัน PC1 เริ่มส่งข้อมูลไปยัง PC3 และสัญญาณไม่มีเวลาไปถึง PC2 เขาก็ตัดสินใจเริ่มส่งสัญญาณ ที่ไหนสักแห่งตรงกลางสัญญาณก็ข้ามและเสื่อมลง PC1 และ PC2 ได้รับสัญญาณที่เสียหายและตระหนักว่าจำเป็นต้องส่งข้อมูลชิ้นนี้อีกครั้ง แต่ละสถานีจะสุ่มเลือกระยะเวลารอเพื่อไม่ให้เริ่มส่งอีกครั้งพร้อมกัน
นี่คือตัวอย่างการทำงานของ Collision Detectionเพื่อป้องกันไม่ให้สถานีหนึ่งครอบครองรถบัส มีช่องว่างระหว่างเฟรม 96 บิต (12 ไบต์) ที่เรียกว่า Inter Frame Gap (IFG) ตัวอย่างเช่น PC1 ส่งเฟรมแล้วรอสักครู่ (เวลาที่ใช้ในการส่ง 96 บิต) และส่งต่อไปเป็นต้น. หาก PC2 ต้องการส่งสัญญาณ จะทำในช่วงเวลาดังกล่าว PC3 และอื่นๆในทางกลับกัน กฎเดียวกันนี้มีผลบังคับใช้เมื่อคุณไม่มีบัสทั่วไป แต่มีสายเคเบิลหนึ่งเส้น โดยที่สถานีสองแห่งเชื่อมต่อกับปลายทั้งสองข้าง และพวกมันจะส่งข้อมูลในโหมดฮาล์ฟดูเพล็กซ์ นั่นคือมีเพียงหนึ่งในนั้นเท่านั้นที่สามารถส่งข้อมูลในแต่ละครั้ง ส่ง PC2 ทันทีที่สายว่าง ส่ง PC1 สายนั้นว่าง - ส่ง PC2 เป็นต้น กล่าวคือ ไม่มีการซิงโครไนซ์เวลาที่ชัดเจน เช่น ใน TDD เมื่อมีการจัดสรรช่องว่างการส่งข้อมูลสำหรับแต่ละจุดสิ้นสุด ดังนั้นการใช้แบนด์วิดท์ที่ยืดหยุ่นมากขึ้นจึงทำได้: หาก PC1 ไม่ต้องการส่งข้อมูลใดๆ PC2 จะไม่อยู่นิ่งเพื่อรอการกลับมา
ปัญหา
แต่ถ้าเราจินตนาการถึงสถานการณ์ที่น่าอึดอัดใจเช่นนี้ล่ะ 
นั่นคือ PC1 ส่งข้อมูลบางส่วนเสร็จแล้ว แต่ยังไม่ถึง PC2 หลังไม่เห็นสัญญาณบนสายและเริ่มส่งสัญญาณ ปัง ที่ไหนสักแห่งท่ามกลางอุบัติเหตุ ข้อมูลถูกบิดเบือน สัญญาณมาถึง PC 1 และ PC 2 แต่ให้ใส่ใจกับความแตกต่าง - PC2 ตระหนักว่าเกิดการชนกันและหยุดส่งข้อมูล ในขณะที่ PC1 ไม่เข้าใจอะไรเลย - การส่งข้อมูลได้สิ้นสุดลงแล้ว อันที่จริง เขาเพิ่งได้รับข้อมูลที่เสียไป และเหมือนกับที่มันเป็น เสร็จสิ้นภารกิจในการส่งเฟรม แต่ข้อมูลสูญหายจริง - PC3 ได้รับสัญญาณผิดเพี้ยนจากการชนกัน ในภายหลัง เมื่อขั้นตอน OSI สูงขึ้นมาก TCP จะสังเกตเห็นการขาดข้อมูลและขอข้อมูลนี้อีกครั้ง แต่ลองนึกดูว่าเวลาจะเสียไปเท่าไหร่?
อย่างไรก็ตาม เมื่อจำนวนข้อผิดพลาด CRC บนอินเทอร์เฟซของคุณเพิ่มขึ้น นี่เป็นสัญญาณบ่งชี้ว่าเกิดการชนกัน - เฟรมที่เสียหายกำลังจะเกิดขึ้น เป็นไปได้มากว่าโหมดการทำงานของอินเทอร์เฟซที่ปลายต่างกันไม่สอดคล้องกัน
เป็นการดีที่จะแยกสถานการณ์ดังกล่าวที่อีเทอร์เน็ตนำเสนอเงื่อนไขหนึ่งข้อ: ในขณะที่ได้รับข้อมูลบิตแรกที่ด้านที่ไกลที่สุดของบัส สถานีจะต้องยังไม่ส่งบิตสุดท้าย นั่นคือกรอบควรจะยืดตลอดความยาวทั้งหมดของรถบัส คำอธิบายนี้เป็นคำอธิบายที่พบบ่อยที่สุด แต่จริงๆ แล้วฟังดูแตกต่างเล็กน้อย: หากเกิดการชนกันที่ส่วนบัสห่างจากผู้ส่งมากที่สุด ข้อมูลเกี่ยวกับการชนกันนี้ควรไปถึงผู้ส่งก่อนที่จะส่งบิตสุดท้าย และนี่คือผลต่าง 2 เท่า เมื่อเทียบกับเงื่อนไขแรกที่กำหนด เพื่อให้แน่ใจว่าแม้เกิดการชนกัน ผู้เข้าร่วมทั้งหมดจะรับรู้ได้อย่างแจ่มแจ้ง และมันเจ๋งมาก แต่จะบรรลุเป้าหมายนี้ได้อย่างไร และที่นี่เราใกล้จะถึงคำถามเกี่ยวกับความยาวของเซ็กเมนต์แล้ว แต่ก่อนที่จะให้คำตอบสำหรับคำถามเกี่ยวกับความยาว เราจะต้องเจาะลึกลงไปในทฤษฎีเครือข่ายเล็กน้อยและแนะนำแนวคิดของเวลาบิตก่อน (คำว่า "เวลาบิต" ไม่ได้หยั่งราก) ค่านี้หมายถึงระยะเวลาที่อินเทอร์เฟซปรากฏขึ้น 1 บิตสู่สภาพแวดล้อม นั่นคือ ถ้า Fast Ethernet ส่ง 100,000,000 บิตต่อวินาทีไปยังสายเคเบิล เวลาบิตคือ 1b/100,000,000 b/s=10^-8 s หรือ 10 นาโนวินาที ทุกๆ 10 นาโนวินาที พอร์ต Fast Ethernet สามารถส่งหนึ่งบิตไปยังสื่อได้ ในการเปรียบเทียบ Gigabit Ethernet ส่ง 1 บิตทุกนาโนวินาที โมเด็ม dial-up รุ่นเก่าสามารถส่ง 1 บิตทุก 18 ไมโครวินาที อาวุธยิงเร็วของ Metal Storm MK5 นั้นในทางทฤษฎีแล้วสามารถยิงกระสุนหนึ่งนัดทุก ๆ 60 ไมโครวินาที ปืนกล Kalashnikov ยิง 1 กระสุนทุกๆ 100 มิลลิวินาที
ถ้าเราพูดถึง IFG สถานีจะต้องหยุดชั่วคราว 96 บิตก่อนส่งแต่ละเฟรม ตัวอย่างเช่น Fast Ethernet ต้องรอ 960 nanoseconds (0.96 microseconds) ในขณะที่ Gbit Ethernet 96 nanoseconds
ดังนั้น เพื่อให้เป็นไปตามเงื่อนไข จึงแนะนำแนวคิดของเวลาควอนตัมหรือเวลาสล็อต ซึ่งเป็นขนาดต่ำสุดของบล็อกข้อมูลที่สามารถส่งผ่านเครือข่ายบนอีเทอร์เน็ตได้ และนี่คือควอนตัมที่ควรขยายไปทั่วทั้งส่วน สำหรับ Ethernet และ Fast Ethernet ขนาดต่ำสุดที่เลือกคือ 64 ไบต์ - 512 บิต ในการส่งสัญญาณ พอร์ต FE ต้องใช้ 10 ns * 512 = 5120 ns หรือ 5.12 µs
ดังนั้นขีดจำกัด 64 ไบต์สำหรับขนาดต่ำสุดของเฟรมอีเทอร์เน็ต
นั่นคือบล็อกข้อมูล 64 ไบต์จะมี 5.12 µs เพื่อเดินทางไปตามรถบัสและกลับไปยังผู้ส่งในกรณีที่เกิดการชนกัน ลองคำนวณระยะทางกันดูนะครับ (5.12 * 10^-6)*(2/3*3*10^8)/2=512 เมตร ให้ฉันอธิบายสูตร: เวลาเดินทาง (5.12 µs แปลงเป็นวินาที) * 2/3 ของความเร็วแสง (ความเร็วของการแพร่กระจายสัญญาณในตัวกลางทองแดงในหน่วย m / s) และหารด้วย 2 - เพื่อให้แย่ที่สุด กรณีเกิดการชนกันเมื่อสัญญาณต้องย้อนกลับไปยังผู้ส่ง ดูเหมือนว่าจะเป็นตัวเลขที่คุ้นเคย - 500 เมตร แต่ปัญหาคือข้อ จำกัด สำหรับ Fast Ethernet คือ 100 เมตรจากฮับ (200 ไปยังสถานีที่ไกลที่สุด) นี่คือจุดที่เกิดความล่าช้าในฮับและตัวทำซ้ำ เขาว่ากันว่าคำนวณและนำมาพิจารณาในสูตรสุดท้ายแล้ว แต่ร่องรอยก็หายไป ต่อให้พยายามหาสูตรคำนวณนี้ด้วยผล 100 เมตรแค่ไหนก็หาไม่เจอ เป็นผลให้เป็นที่ทราบกันดีว่าอะไรทำให้เกิดข้อ จำกัด แต่ไม่ใช่ว่าหมายเลข 100 มาจากไหน
กิกะบิตอีเธอร์เน็ต
ในการพัฒนา Gbit Ethernet เกิดคำถามที่สำคัญมาก - เวลาในการส่งข้อมูลหนึ่งบิตมีอยู่แล้ว 1 ns และใช้เวลาเพียง 0.512 μs ในการถ่ายโอนข้อมูลเพียงส่วนเดียว แม้เมื่อคำนวณแบบตัวต่อตัวด้วยสูตรของฉัน โดยไม่คำนึงถึงความล่าช้า ก็ยังได้รับความยาว 50 เมตร (และ 20 เมตร โดยคำนึงถึงค่าเหล่านี้ด้วย) น้อยมาก ดังนั้นจึงมีการตัดสินใจ แทนที่จะลดระยะทาง (เช่นเดียวกับการเปลี่ยนอีเทอร์เน็ต->อีเทอร์เน็ตแบบรวดเร็ว) เพื่อเพิ่มขนาดข้อมูลขั้นต่ำเป็น 512 ไบต์ - 4096 บิต เวลาในการส่งข้อมูลส่วนนั้นยังคงใกล้เคียงกัน - 4 วินาทีเทียบกับ 5 แน่นอนว่ามีอีกจุดหนึ่งที่ไม่สามารถรวบรวมขนาดดังกล่าวได้เสมอ - 4 kB ของข้อมูลดังนั้นในตอนท้าย ของเฟรมหลังจากฟิลด์ FCS จำนวนข้อมูลที่ขาดหายไปจะถูกเพิ่มเข้าไป เนื่องจากเราละทิ้งรถโดยสารสาธารณะไปนานแล้ว เรามีสภาพแวดล้อมที่แยกจากกันสำหรับการรับและส่งสัญญาณ และไม่มีการชนกันเช่นนี้ ทั้งหมดนี้ดูเหมือนไม้ค้ำยัน ดังนั้นในมาตรฐาน 10 Gbit Ethernet กลไก CSMA / CD จึงถูกยกเลิกโดยสิ้นเชิง
เอาชนะข้อจำกัดความยาว
จากทั้งหมดที่กล่าวมาเกี่ยวข้องกับเครือข่ายฮาล์ฟดูเพล็กซ์ที่ล้าสมัยด้วยบัสทั่วไป สิ่งนี้เกี่ยวข้องกับช่วงเวลาปัจจุบันคุณถามอะไร? เราสามารถดึง UTP กิโลเมตรได้หรือไม่? น่าเสียดายที่การจำกัดความยาวร้อยเมตรมีลักษณะที่แตกต่างออกไป แม้จะอยู่ที่ 120 เมตรด้วยสายเคเบิลธรรมดา ส่วนใหญ่แล้ว สวิตช์จำนวนมากจะไม่สามารถยกตัวเชื่อมได้ เนื่องจากความจุของพอร์ตของสวิตช์และคุณภาพของสายเคเบิล ประเด็นคือการลดทอนและในปิ๊กอัพและความผิดเพี้ยนของสัญญาณระหว่างการส่งสัญญาณ คู่บิดเกลียวสามัญอาจมีการรบกวนทางแม่เหล็กไฟฟ้าและไม่รับประกันการป้องกัน ข้อมูลที่ส่ง. แต่ก่อนอื่น มาดูการลดทอนกันก่อน ลูป UTP ทั่วไปของเรามีขั้นต่ำ 27 รอบต่อเมตร และส่งข้อมูลที่ 100 MHz การลดทอนเชิงเส้นที่เรียกว่าการลดทอนสัญญาณสำหรับแต่ละเมตรของตัวกลาง ตามมาตรฐานการลดทอนไม่ควรเกิน 24 เดซิเบล โดยเฉลี่ยแล้ว ค่านี้จะอยู่ที่ประมาณ 22 dB สำหรับสาย UTP ปกติ ซึ่งหมายความว่าสัญญาณดั้งเดิมจะถูกลดทอนลง 158 เท่า ปรากฎว่าการลดทอน 1 dB เกิดขึ้นทุกๆ 4.5 เมตร หากเราใช้สายเคเบิลยาว 150 เมตร การลดทอนจะอยู่ที่ 33 เดซิเบล และสัญญาณเดิมจะลดลงในปี 2538 ซึ่งมีความสำคัญมากอยู่แล้ว นอกจากนี้ยังมีการเพิ่มอิทธิพลซึ่งกันและกันของคู่สิ่งนี้ - ครอสทอล์ค นี่คือชื่อของกระบวนการเมื่อปิ๊กอัพเกิดขึ้นในตัวนำแบบขนาน นั่นคือ ส่วนหนึ่งของพลังงานถูกใช้ไปในการเหนี่ยวนำกระแสในสายเคเบิลที่อยู่ติดกัน ลองพิจารณาสัญญาณรบกวนที่อาจเกิดขึ้นจากสายไฟที่สามารถผ่านในบริเวณใกล้เคียง และขีดจำกัด 100 เมตรจะกลายเป็นตรรกะอย่างสมบูรณ์
เหตุใดข้อจำกัดดังกล่าวจึงไม่อยู่ในเครือข่ายโคแอกเซียล ความจริงก็คือการลดทอนในสายเคเบิลขึ้นอยู่กับความต้านทาน / ส่วนตัดขวางของสายเคเบิลและความถี่ จำได้ว่าตอนนี้อีเธอร์เน็ตแบบหนาใช้สายเคเบิลที่มีแกนขนาด 2.17 มม. นอกจากนี้ อีเธอร์เน็ตบนสายโคแอกเซียลยังทำงานที่ความถี่ 10 MHz และยิ่งความถี่สูงเท่าใด การลดทอนก็จะยิ่งสูงขึ้นเท่านั้น ทำไมคุณถึงคิดว่าสัญญาณวิทยุอะนาล็อกถูกส่งไปยังเสาอากาศไม่ผ่านขดลวดที่สะดวก แต่ผ่านตัวป้อนแบบหนา อนึ่ง คำว่าฐานใน มาตรฐานอีเธอร์เน็ตหมายถึงเบสแบนด์และระบุว่าอุปกรณ์เดียวเท่านั้นที่สามารถส่งข้อมูลผ่านสื่อในแต่ละครั้ง ไม่ใช้การมอดูเลต / มัลติเพล็กซ์ ในทางตรงกันข้าม บรอดแบนด์กำหนดหลายอย่าง สัญญาณต่างๆบนตัวพาหนึ่ง และในอีกทางหนึ่ง สัญญาณแต่ละตัวจากตัวพาจะถูกแยกออก
อันที่จริง การลดทอนนั้นเกิดจากคุณลักษณะและคุณภาพของสายเคเบิล คุณจึงสามารถบรรลุผลลัพธ์ที่มีความสุขมากขึ้นได้โดยใช้สายเคเบิลที่เหมาะสมกว่า ตัวอย่างเช่น ด้วยความช่วยเหลือของสายเคเบิล P-296 หรือ P-270 แม้แต่เส้นสามร้อยเมตรก็สามารถเอาชนะได้ แน่นอนว่านี่คือ 100 Mb / s ในฟูลดูเพล็กซ์ สำหรับกิกะบิตแล้ว ข้อกำหนดอื่นๆ โดยทั่วไป ยิ่งอัตราการถ่ายโอนสูงเท่าใด ยิ่งต้องคำนึงถึงพารามิเตอร์มากขึ้นเท่านั้น ซึ่งเป็นเหตุว่าทำไม 10Gbit Ethernet จึงสนับสนุนสภาพแวดล้อมทองแดงในนามเท่านั้น และให้ความพึงพอใจกับออปติก
ผลลัพธ์และลิงค์
โดยทั่วไป เมื่อสรุปทั้งหมดข้างต้น ระยะ 100 เมตรมีระยะขอบที่ดี ซึ่งรับประกันการทำงานแม้ในครึ่งเพล็กซ์บนสายเคเบิลไม่ คุณภาพดีที่สุด. เกิดจากการลดทอนและการทำงานของกลไก CSMA / CD ข้อมูลที่ใช้ในบทความ
หน้า 1
ความยาวสูงสุดของสายที่เชื่อมต่อเครื่องตรวจจับ DPS-038 กับ PIO-017 ทำจากลวดทองแดงที่มีหน้าตัดขนาด 15 มม.2 คือ 100 โอห์ม ในการปรับค่าความต้านทานของเส้นในสภาพจริง จะใช้การปรับค่าความต้านทานที่ออกแบบมาเป็นพิเศษใน PIO-17 ความต้านทานสายควรเป็น 2 โอห์ม หากความต้านทานของสายมีค่าน้อยกว่า 2 โอห์ม เครื่องตรวจจับจะทริกเกอร์รีเลย์ด้วยอัตราการเพิ่มอุณหภูมิแวดล้อมที่ต่ำมาก อาจมีสัญญาณเตือนที่ผิดพลาดได้ หากความต้านทานของสายมีค่ามากกว่า 2 โอห์ม TEDS ที่เครื่องตรวจจับพัฒนาขึ้นจะไม่เพียงพอที่จะกระตุ้นรีเลย์ หรือจะทำงานในกรณีที่เกิดไฟไหม้ ซึ่งพลังงานความร้อนนั้นสูงกว่าค่าสูงสุดที่ควบคุมโดยเครื่องตรวจจับเหล่านี้อย่างมีนัยสำคัญ .
ความยาวสูงสุดของสายสื่อสารคือ 14 กม. สายสื่อสารเป็นคู่โทรศัพท์เฉพาะ
ความยาวสูงสุดของสายส่งระยะไกลแบบนิวแมติกสามารถเป็น 300 ม. โดยมีเส้นผ่านศูนย์กลางภายในของท่อส่ง 4 - 6 มม. และความเฉื่อยของสายส่ง 30 - 35 วินาที
คำถามเกี่ยวกับความยาวสูงสุด L ของเส้นจะลดลงเพื่อกำหนดความต้านทานไฟฟ้าสูงสุดของสายไฟ 3 ซึ่งการทำงานที่เชื่อถือได้ของสายจะยังคงดำเนินต่อไป ดังนั้น หากเราคิดว่าตัวรับและตัวส่งเชื่อมต่อกันด้วยลวดทองแดงที่มีเส้นผ่านศูนย์กลาง 0 5 มม. จากนั้นโดยใช้ความสัมพันธ์ที่รู้จักกันดีจากวิศวกรรมไฟฟ้า เราสามารถระบุได้ว่าความยาวสาย L คือ 28 กม.
ระหว่าง CP และ PU อนุญาตให้ใช้ความยาวสูงสุดของสายสื่อสารได้ไม่เกิน 60 กม. (สำหรับสายการสื่อสารทางกายภาพโดยเฉพาะ) โดยมีช่องสัญญาณวิทยุที่มีความยาวไม่เกิน 30 กม.
ยกตัวอย่างในตาราง 2.4 แสดงความยาวสูงสุดของสายสื่อสารขึ้นอยู่กับชนิดของสายเคเบิล
ในบางกรณี จะสะดวกกว่าในการคำนวณตามความยาวสูงสุดของเส้น ซึ่งช่วยให้มั่นใจได้ว่าจะปิดในกรณีที่เกิดข้อผิดพลาดที่กราวด์
ระบบสื่อสารใต้น้ำที่พัฒนาขึ้นในปี 1970 อนุญาตให้มีความยาวสายสูงสุด 7200 กม. โดยมีแอมพลิฟายเออร์เซมิคอนดักเตอร์มากถึง 400 ตัว
บนเม็ดมะยมทางกายภาพของ EM ควรพิจารณาสิ่งต่อไปนี้: ชนิดและลักษณะของสื่อรับส่งข้อมูล โทโพโลยีของส่วนประกอบของสื่อรับส่งข้อมูล ขนาดและการออกแบบและลักษณะทางเทคโนโลยีขององค์ประกอบ SPT จำนวนเครื่องส่ง ตัวรับ ตัวทำซ้ำ และตัวตอบสนองของสัญญาณบนสายโมโนแชนเนล ความยาวสายสูงสุดระหว่างสถานี ลักษณะสถิตและไดนามิกของเครื่องรับ เครื่องส่งสัญญาณ คัปเปิ้ลและเจลทำซ้ำ ตลอดจนตัวเข้ารหัส-ตัวถอดรหัสของสัญญาณไบนารีแบบไตรภาคและในทางกลับกัน
ที่ระดับกายภาพของ EM ควรพิจารณาสิ่งต่อไปนี้: ชนิดและลักษณะของสื่อรับส่งข้อมูล โทโพโลยีของส่วนประกอบของสื่อรับส่งข้อมูล ขนาดและการออกแบบและลักษณะทางเทคโนโลยีขององค์ประกอบ SPT จำนวนเครื่องส่ง ตัวรับ ตัวทำซ้ำ และตัวต่อสัญญาณบนสายโมโนแชนเนล ความยาวสายสูงสุดระหว่างสถานี ลักษณะสถิตและไดนามิกของเครื่องรับ เครื่องส่งสัญญาณ คัปเปลอร์ และรีพีทเตอร์ ตลอดจนตัวเข้ารหัส-ตัวถอดรหัสของสัญญาณไบนารีแบบไตรภาคและในทางกลับกัน
โมดูลเอาท์พุต สัญญาณไม่ต่อเนื่อง(MVD) ส่งสัญญาณออกไปยังแอคทูเอเตอร์ของสัญญาณควบคุมการเปิด-ปิด จำนวนช่องสัญญาณออก - 8; ระดับสูงสุดของแรงดันไฟสลับ - 48 V; กระแสสลับสูงสุด - 0 2 A; ความถี่การสลับสูงสุด - 10 kHz; ความยาวสูงสุดของสายสื่อสารคือ 3 กม.
ตัวอย่างเช่น ความยาวของเส้นค่าใช้จ่ายที่มีแรงดันไฟฟ้า 35 kV ไม่เกิน 35 - 40 กม. ความยาวสูงสุดของเส้น 6 kV คือ 5 - 6 กม. หากเลือกหรือตั้งค่าแรงดันไฟไว้ ส่วนตัดขวางของสายไฟของสายไฟจะถูกเลือกตามกระแสโหลด จากนั้นตรวจสอบแรงดันไฟที่สูญเสียในสายที่กระแสโหลดนี้
คำแนะนำ
เพื่อกำหนดขอบเขตของรัสเซีย ก่อนอื่นจำเป็นต้องทราบจุดทางภูมิศาสตร์สุดขั้ว ทางตอนเหนือ รัสเซียมีจุดสุดขั้วสองจุด: ทวีปและทวีปโดดเดี่ยว สถานที่แรกตั้งอยู่ที่ Cape Chelyuskin บนคาบสมุทร Taimyr แห่งที่สองอยู่ที่ Cape Fligeli บนเกาะ Rudolf ในหมู่เกาะ Franz Josef จุดใต้สุดตั้งอยู่ทางตะวันตกเฉียงใต้ของ Mount Barduzu ติดกับอาเซอร์ไบจาน นอกจากนี้ยังมีจุดสุดโต่งทางทิศตะวันออกสองจุด: เกาะหนึ่ง - บนเกาะ Ratmanov ซึ่งเป็นส่วนหนึ่งของหมู่เกาะ Diomede ในช่องแคบแบริ่งและจุดทวีป - ที่ Cape Dezhnev จุดตะวันตกสุดขั้วที่สุดของรัสเซียตั้งอยู่ที่ชายแดนของภูมิภาคคาลินินกราดและโปแลนด์ - นี่คือทะเลบอลติก
ความยาวของอาณาเขตของประเทศจากตะวันตกไปตะวันออกหรือจากเหนือจรดใต้สามารถกำหนดได้ด้วยมาตราส่วนหรือโดยการใช้ตารางองศาที่มีอยู่ในแผนที่หรือโลกแต่ละแห่ง หากคุณต้องการกำหนดระยะทางบนมาตราส่วน ให้ใช้ไม้บรรทัด วัดระยะทางจากจุดสุดขั้วหนึ่งไปอีกจุดหนึ่งเป็นเซนติเมตร แล้วคูณจำนวนผลลัพธ์ด้วยมาตราส่วน - คุณจะได้ผลลัพธ์เป็นกิโลเมตร
การคำนวณระยะทางโดยใช้ graticule ค่อนข้างยากกว่า ในการกำหนดความยาวของประเทศจากเหนือจรดใต้ ให้ค้นหาละติจูดของจุดเหนือสุดและจุดใต้สุด กำหนดความแตกต่างในองศาและคูณจำนวนผลลัพธ์ด้วย 111.1 กม. (ระดับของเส้นเมริเดียนแต่ละจุดคือ 111.1 กม.) ในการกำหนดขอบเขตของอาณาเขตจากตะวันตกไปตะวันออก คุณต้องทราบลองจิจูดของจุดตะวันตกสุดขั้วและสุดขั้วตะวันออก โปรดจำไว้ว่าจุดตะวันออกสุดทั้งสองอยู่ในลองจิจูดตะวันตก
คำนวณระยะห่างระหว่างจุดสุดขั้วเป็นองศา คำนวณผลต่างและคูณด้วยตัวบ่งชี้คู่ขนานที่ต้องการ ที่เส้นขนานของละติจูด 40 องศาเหนือ (ต่อไปนี้ - NL) 1 องศาเท่ากับ 85.4 กม. ละติจูด 50 องศาเหนือ 1 องศา เท่ากับ 71.7 กม. 60 องศา N 1 องศา เท่ากับ 55.8 กม. 70 องศาเหนือ 1 องศา เท่ากับ 38.2 กม.
ในบทเรียนภูมิศาสตร์ อาจจำเป็นต้องใช้วิธีการชั่วคราวในการแปลข้อมูลภาพแผนที่เป็นภาษาตัวเลขที่เข้มงวด กำหนด ระยะเวลาวัตถุทางภูมิศาสตร์ใด ๆ รวมถึงทวีปแอฟริกาในหลายวิธี แต่ไม่มีใครจะให้ผลลัพธ์ที่ถูกต้องร้อยเปอร์เซ็นต์ ข้อผิดพลาดจะอยู่ที่ประมาณร้อยกิโลเมตร
คุณจะต้องการ
- แผนที่สวยๆ ของสิ่งพิมพ์ทางวิชาการดีๆ ไม้บรรทัด เครื่องคิดเลข
คำแนะนำ
ใช้เอกสารอ้างอิงเกี่ยวกับภูมิศาสตร์ พจนานุกรมสารานุกรมและสิ่งพิมพ์ที่มีชื่อเสียงเกี่ยวกับพื้นที่ที่กำหนดตามกฎแล้วมีข้อมูลเกี่ยวกับพารามิเตอร์หลักของวัตถุทางภูมิศาสตร์ที่กำหนด ข้อมูลที่คุณสนใจสามารถค้นหาได้ง่ายบนอินเทอร์เน็ต
ใช้แผนที่หรือลูกโลกแล้วใช้ไม้บรรทัดหรือเข็มทิศเพื่อกำหนด ระยะเวลาวัตถุในหน่วยเซนติเมตรหรือมิลลิเมตร มองอย่างระมัดระวังที่มุมของแผนที่นี้ คุณจะพบข้อมูลเกี่ยวกับมาตราส่วนที่มุมล่างขวา (จำนวนกิโลเมตรที่พอดีในหนึ่งเซนติเมตรของแผนที่) คูณจำนวนผลลัพธ์ด้วยมาตราส่วนแผนที่เฉพาะ ตัวเลขที่ได้จะเป็นตัวเลขที่ต้องการ
วิธีคำนวณทางคณิตศาสตร์ที่แม่นยำที่สุด ระยะเวลาแผ่นดินใหญ่คือการคำนวณเส้นเมอริเดียนและแนวขนาน กำหนดละติจูดของจุดเหนือสุดของแผ่นดินใหญ่บนแผนที่โดยลองจิจูดที่กำหนด (for แอฟริกานี่คือละติจูดเหนือประมาณ 32o) และจุดใต้สุดที่ลองจิจูดเดียวกัน (ลองจิจูดประมาณ 34o ใต้) บวกผลลัพธ์และคำนวณ ระยะเวลาแผ่นดินใหญ่ในองศา 32 + 34 = 66o
ระยะทางบินสูงสุด
บางครั้งจำเป็นต้องจำกัดความยาวของเที่ยวบินสำหรับรถยนต์บางคัน ตัวอย่างเช่น หากบริษัทขนส่งใช้ยานพาหนะไฟฟ้า เป็นสิ่งสำคัญที่ยานพาหนะดังกล่าวจะมีเวลากลับไปที่คลังก่อนที่จะปล่อย การใช้ตัวเลือกนี้ ผู้มอบหมายงานสามารถกำหนดระยะเวลาของเที่ยวบินที่ต้องการสำหรับยานพาหนะบางประเภทได้
วิธีการทำงานของตัวเลือก "ระยะทางบินสูงสุด" ใน VeeRoute
คุณสามารถตั้งค่าพารามิเตอร์ "การเดินทางสูงสุด"ไม่ว่าจะในการตั้งค่าหลักหรือในรูปแบบ "รถ".
หากต้องการกำหนดระยะการเดินทางสูงสุดของรถที่มีอยู่ในการตั้งค่าทั่วไป ให้ไปที่ "การตั้งค่า"แล้วเลือกแท็บ "รถ"ในรายการ "การตั้งค่าทั่วไป". เลือกรถที่ต้องการ กำหนดระยะการบินสูงสุดในหน่วยของบัญชีของคุณ (ไมล์หรือกิโลเมตร) และบันทึกการเปลี่ยนแปลง
รูปที่ 1. การตั้งค่าระยะการเดินทางสูงสุดในการตั้งค่าหลัก
การตั้งค่านี้จะเป็นค่าเริ่มต้นสำหรับรถคันนี้จนกว่าคุณจะเปลี่ยนการตั้งค่า
หากคุณต้องการกำหนดระยะเวลาการเดินทางสูงสุดของรถในวันที่กำหนดหรือแก้ไขค่าระยะทางสูงสุดที่มีอยู่ ให้คลิกที่บัตรของรถแล้วเปิดแบบฟอร์ม "รถ". ตั้งค่าระยะการเดินทางสูงสุดของรถในหน่วยของบัญชีของคุณ (ไมล์หรือกิโลเมตร) และบันทึกการเปลี่ยนแปลง
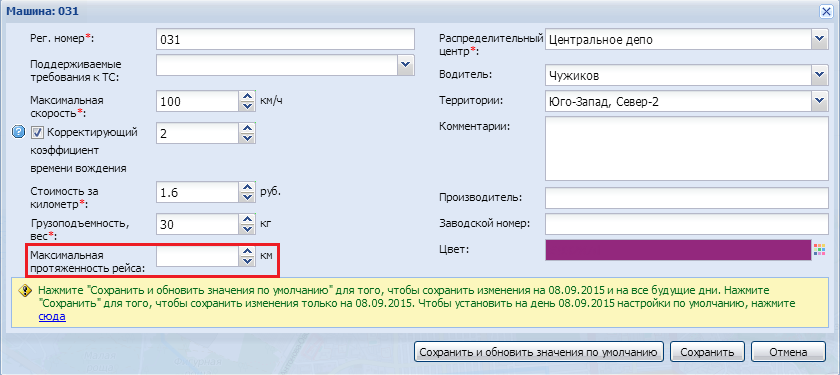
รูปที่ 2 การตั้งค่าระยะการเดินทางสูงสุดในแบบฟอร์ม "รถยนต์"
ด้วยการตั้งเวลาอัตโนมัติ VeeRoute จะไม่สร้างการเดินทางที่เกินระยะเวลาการเดินทางสูงสุดที่ระบุตั้งแต่ต้นจนจบ หากไม่สามารถกำหนดเวลาการสั่งซื้อได้เนื่องจากเกินระยะเวลาสูงสุดของเที่ยวบิน VeeRoute จะระบุสาเหตุที่คำสั่งไม่ได้กำหนดไว้ - "เกินความยาวของเที่ยวบิน".
รูปที่ 3 สาเหตุที่ไม่มีกำหนดการสั่ง: เกินระยะเวลาที่อนุญาตของเที่ยวบิน
ในการวางแผนด้วยตนเอง หากการเดินทางของยานพาหนะเกินการเดินทางสูงสุด VeeRoute จะแสดงคำเตือนบนบัตรรถและบน "หาง"เที่ยวบิน:
รูปที่ 4 คำเตือน VeeRoute เกี่ยวกับการเดินทางเกินระยะเวลาสูงสุด (บัตรยานพาหนะ)
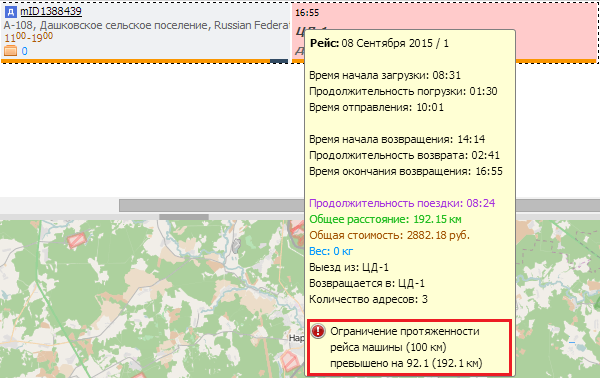
รูปที่ 5. คำเตือน VeeRoute เกี่ยวกับการเกินความยาวสูงสุดของเที่ยวบิน ("หาง" ของเที่ยวบิน)
เมื่อจัดโทรศัพท์สำนักงานแบบสองทาง การสื่อสารด้วยแสงในไฟเบอร์ออปติกหนึ่งเส้นที่ความยาวคลื่นเดียว จำเป็นต้องใช้ BOT กับระบบดิฟเฟอเรนเชียลออปติคัลตามตัวแยกรูปตัว Y ในเวลาเดียวกันในแต่ละ ทิศทาง A-Bและ BA เชิงเส้นสัญญาณออปติคัลถูกส่งที่ความยาวคลื่น λ =1310 nm หรือที่ความยาวคลื่น λ =1550 nm
เป็นที่ทราบกันดีอยู่แล้วว่าค่าสัมประสิทธิ์การลดทอนที่ความยาวคลื่นเหล่านี้แตกต่างกัน:
ที่ λ = 1310 นาโนเมตร ปัจจัยการลดทอน a = 0.34 dB/km;
ที่ λ = 1550 นาโนเมตร ปัจจัยลดทอน a = 0.22 เดซิเบล/กม.
เพื่อให้แน่ใจว่ามีช่วงการสื่อสารสูงสุดของ BOT ขอแนะนำให้ใช้ λ = 1550 นาโนเมตร แต่ตัวเลือกนี้จะเพิ่มต้นทุนของ BOT ดังนั้น WOTs ที่ทำงานที่ความยาวคลื่น λ = 1310 nm จึงแพร่หลายมากขึ้น
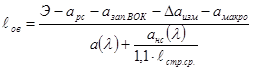
การคำนวณช่วงการสื่อสารสูงสุดโดยใช้ BOT ทำตามสูตร [ 8 ]
E - พลังงานศักย์ ที่นี่;
α(λ) [dB/km] - ค่าสัมประสิทธิ์การลดทอน ใยแก้วนำแสง;
ℓov [km] - ความยาวสูงสุดของใยแก้วนำแสง
ars - การลดทอนทั้งหมดของการเชื่อมต่อที่ถอดออกได้ด้วยแสง (ORS) ในรูปแบบองค์กรของ optical การสื่อสารในสำนักงาน;
azap.VOK = 3dB ระยะขอบลดทอนของสายเคเบิลออปติคัลสำหรับระยะเวลาการทำงาน (ประมาณ 25-30 ปี)
การวัดΔ [dB] - ข้อผิดพลาดของเครื่องมือวัด 0.5 dB;
amacro [dB] - การสูญเสีย FOC macrobend ซึ่งสามารถละเลยได้หากติดตั้ง FOC อย่างถูกต้อง
และ ns(λ) คือค่าลดทอนที่อนุญาตโดยเฉลี่ยของรอยต่อรอยบน ECU
p.av. - ความยาวเฉลี่ยของความยาวก่อสร้างของ WOC (4 กม.)
ศักย์พลังงาน E คำนวณโดยสูตร
E \u003d rprd - รอบต่อนาที นาที [dB]
โดยที่ rprd คือระดับของการส่งสัญญาณออปติคัลเชิงเส้นที่เอาต์พุตของ HERE
รอบต่อนาที นาที - ขั้นต่ำ ระดับที่อนุญาตแผนกต้อนรับที่ทางเข้าที่นี่
ค่าเหล่านี้จะได้รับใน ข้อกำหนดทางเทคนิคที่นี่.
ใน WOT สมัยใหม่ ค่าศักย์ไฟฟ้าคือ E≈50÷60 dBm
โดยปกติ จำเป็นต้องทราบช่วงการสื่อสารสูงสุดของ BOT เมื่อจัดการสื่อสารบริการด้านการปฏิบัติงานบน ECU ที่ติดตั้งไว้
จากนั้นในการคำนวณ จำเป็นต้องคำนึงว่าในกรณีนี้ การเชื่อมต่อแบบออปติคัล OPC แบบถอดได้สี่แบบถูกใช้เพื่อเชื่อมต่อ BOT กับกล่องกระจายแสง ODF ของ ECU: OPC สองตัวที่ด้านหนึ่งของ ECU และ OPC สองตัวที่อยู่ตรงข้าม ด้านข้าง.
การลดทอนเฉลี่ยของ OPC อยู่ที่ประมาณ 0.3 dB การลดทอนรวม ars =1.2 dB
ค่าเฉลี่ยการลดทอนที่อนุญาตของรอยต่อรอยบน ECU a ns(λ) ถูกกำหนดตามมาตรฐานสำหรับรอยต่อรอยบน ECU
สำหรับความยาวคลื่น λ= 1.31 µm ค่า a ns(λ)=0.15 dB สำหรับความยาวคลื่น λ= 1.55 µm ค่า a ns(λ)=0.075 dB
ตัวอย่างเช่น ในวิทยานิพนธ์ ความยาวสูงสุดของการเชื่อมต่อสำหรับ WOT กับค่าศักย์ไฟฟ้า E = 50 dBm ที่ความยาวคลื่น λ = 1310 nm ถูกคำนวณ
แทนค่าในสูตรที่เราได้รับสำหรับความยาวคลื่น λ= 1.31 µm ความยาวสูงสุดของใยแก้วนำแสง
 =
=![]()
![]() .4 กม.
.4 กม.
ความยาวสูงสุดของการสื่อสารสำหรับ BOT ถูกกำหนดโดยความยาวสูงสุดของเส้นทาง FOCL ซึ่งน้อยกว่าความยาวของใยแก้วนำแสง
ℓtr.≈ = ![]()
![]() .
.
 การปรับแต่งรูปแบบแป้นพิมพ์ภาษารัสเซียบน iphone 5s
การปรับแต่งรูปแบบแป้นพิมพ์ภาษารัสเซียบน iphone 5s ความละเอียดหน้าจอของ iPhone คืออะไร หน้าจอบน iphone 6 . คืออะไร
ความละเอียดหน้าจอของ iPhone คืออะไร หน้าจอบน iphone 6 . คืออะไร วิธีเขียนถึงฝ่ายสนับสนุนด้านเทคนิค
วิธีเขียนถึงฝ่ายสนับสนุนด้านเทคนิค