กำลังเชื่อมต่อ mini osd กับ apm pro OSD สำหรับ ArduPilot Mega คือระบบสำหรับวางซ้อนข้อมูล telemetry บนวิดีโอการบิน MinimOSD ขนาดเต็ม
Betaflight OSD (ข้อมูลบนหน้าจอ) คือการรวมข้อมูลจากเซ็นเซอร์ต่างๆ ลงในสตรีมวิดีโอผ่านตัวควบคุมการบิน โดยปกติ OSD จะเป็นบอร์ดที่ติดตั้งเพิ่มเติม หรือชิปที่รวมไว้แล้วในตัวควบคุมการบิน OSD ส่งข้อมูล เช่น แรงดันแบตเตอรี่ ขอบฟ้า ระดับความสูง และอื่นๆ ไปยังหมวกนิรภัยหรือหน้าจอแว่นตา
คุณยังสามารถใช้เมนู OSD เพื่อเปลี่ยน PID, ฟิลเตอร์ และการตั้งค่าอื่นๆ ของ quadcopter ในบทความนี้ ผมจะอธิบายว่า Betaflight OSD คืออะไร มีไว้ทำอะไร และตั้งค่าอย่างไร
Betaflight OSD เทียบกับ MinimOSD (MWOSD)
Betaflight OSD นั้นเรียบง่ายและดีกว่า MinimOSD:
- อย่างแรกคือชิปที่รวมไว้แล้วในตัวควบคุมการบิน คุณไม่จำเป็นต้องบัดกรีหรือเชื่อมต่ออะไรเลย ในขณะที่ MinimOSD เป็นบอร์ดแยกต่างหากที่คุณต้องบัดกรีส่วนประกอบทั้งหมดของควอดคอปเตอร์ เช่น พีซี กล้อง วิดีโอ เครื่องส่งและอื่น ๆ ขึ้นอยู่กับเซ็นเซอร์ที่คุณจะใช้มากกว่า นอกจากนี้ คุณต้องมีโปรแกรมเมอร์เพื่อแฟลชโมดูลนี้ผ่านคอมพิวเตอร์
- ประโยชน์ของ Betaflight OSD: ติดตั้งง่ายเนื่องจากทุกอย่างถูกรวมไว้แล้ว การกำหนดค่าเกิดขึ้นใน Betaflight GUI คุณไม่จำเป็นต้องบัดกรี แฟลชอะไรก็ได้ คุณไม่จำเป็นต้องมีโปรแกรมเมอร์และเฟิร์มแวร์โมดูลของบริษัทอื่น
- Betaflight OSD ไม่ได้ใช้พอร์ต UART เนื่องจากปกติจะเชื่อมต่อกับ SPI BUS
แม้ว่าตอนนี้ MinimOSD จะได้รับการพัฒนามาค่อนข้างดีแล้ว และยังมีเชลล์แบบกราฟิกและมีลักษณะที่คล้ายคลึงกัน
ผู้ควบคุมการบินใดบ้างที่รองรับ Betaflight OSD
ตัวควบคุมการบินบางตัวที่มี OSD ในตัวไม่รองรับ Betaflight OSD บางตัวต้องการซอฟต์แวร์การตั้งค่า OSD เพิ่มเติม
ปัจจุบัน Betaflight OSD รองรับโดยเครื่องบินต่อไปนี้: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 และ Betaflight F3
การกำหนดค่า Betaflight OSD
อันดับแรก ตรวจสอบให้แน่ใจว่าคุณมีเฟิร์มแวร์ตัวควบคุมการบินล่าสุด เนื่องจาก OSD รองรับบนเฟิร์มแวร์ Betaflight V3.1 และใหม่กว่า
หากเครื่องบินของคุณมีชิป OSD ในตัวอยู่แล้ว เพียงเชื่อมต่อกล้องและเครื่องส่งวิดีโอเข้ากับพอร์ตที่เหมาะสม
ด้านล่างนี้คือตัวอย่างวิธีเชื่อมต่อกล้องและเครื่องส่งกับตัวควบคุมการบิน DYS F4 Pro FC โดยกล้องจะเชื่อมต่อกับ "Vin" และเครื่องส่งไปที่ "Vout":
ตอนนี้เชื่อมต่อกับ Betaflight Configurator ไปที่ tab การกำหนดค่าและเปิด OSD:
หลังจากนั้น ไปที่แท็บ OSD เพื่อเริ่มการตั้งค่า:
อะไรจะง่ายกว่าอินเทอร์เฟซนี้ เพียงเปิดและปิดข้อมูลที่คุณต้องการแสดง
รูปแบบวิดีโอ - เลือก PAL หรือ NTSC ขึ้นอยู่กับโหมดกล้อง FPV ของคุณ ถ้าไม่รู้ว่ากล้องอยู่ในโหมดอะไร ให้ตั้งเป็น AUTO โปรแกรมจะเลือกรูปแบบให้กล้องทำงาน
ข้อมูลสำคัญ: หากหน้าจอแสดงตัวอย่างอยู่ในโหมด PAL หรือ AUTO และกล้องของคุณอยู่ใน NTSC ข้อมูลที่แสดงที่ด้านล่างของหน้าจอจะถูกตัดออก ซึ่งเป็นคุณลักษณะของรูปแบบนี้ มีเฟรมที่สั้นกว่า เมื่อใช้รูปแบบ AUTO ควรวางข้อมูลที่ต้องการไว้ตรงกลางหน้าจอ
ในบล็อก "นาฬิกาปลุก" คุณสามารถตั้งค่า RSSI ความจุของแบตเตอรี่ เวลาก่อนบิน (นาฬิกาจับเวลา) และระดับความสูงได้ ทันทีที่ข้อมูลเริ่มตรงกับตัวเลขเหล่านี้ ตัวเลขเหล่านั้นจะเริ่มกะพริบบนหน้าจอหมวกกันน็อคหรือแว่นตา
ในหน้าต่างแสดงตัวอย่าง คุณสามารถลากข้อมูลที่แสดงได้ตามต้องการ แต่อย่าวางไว้ใกล้ขอบมากเกินไป เพราะอาจถูกตัดออก
- จอแสดงผลแรงดันแบตเตอรี่
- เวลาเที่ยวบิน (นาฬิกาจับเวลา)
- ชื่อ (ของตัวเอง)
- ค่าแก๊ส
- โดรนกินกระแสเท่าไหร่
- ความจุแบตเตอรี่ mAh เสียไปเท่าไหร่
ในการเปิดใช้งานเมนู OSD ในแว่นตาหรือหมวกกันน็อค คุณต้องใช้การเคลื่อนไหวแบบแท่งบนรีโมทคอนโทรลร่วมกัน:
- แก๊สอยู่ตรงกลาง
- yaw (yaw, axis roll) ซ้าย
- pitch (pitch, เอียง) ไปข้างหน้า
แก๊สจะต้องอยู่ตรงกลางของการปรับจูนทั้งหมด!
หากต้องการเลื่อนดูเมนู ให้ใช้ แท่งขวาบนรีโมท การเลื่อน - ติดขึ้นหรือลง เพื่อเลือกรายการเมนู - ติดซ้าย / ขวา
คุณสามารถเปลี่ยน PID ตัวกรอง โปรไฟล์ และอื่นๆ ได้ที่นี่ การตั้งค่าเหล่านี้ส่วนใหญ่จะอธิบายได้ด้วยตนเอง หากคุณได้กำหนดค่า Betaflight ผ่าน GUI ของแท็บ OSD แล้ว แต่ยังไม่ใช่ทุกรายการที่นี่ บางรายการมีเฉพาะในเครื่องมือกำหนดค่าเท่านั้น หลังจากตั้งค่าแล้ว ให้ไปที่เมนูหลักแล้วคลิก " บันทึก * รีบูต«.
วิธีเปลี่ยนแบบอักษรใน Betaflight OSD
หากคุณไม่ชอบแบบอักษรที่แสดงบนหน้าจอ คุณสามารถเปลี่ยนได้อย่างง่ายดายใน Betaflight Configurator โดยไปที่แท็บ OSD แล้วจะมีปุ่ม Font Manager ที่ด้านล่าง:
หลังจากเลือกแบบอักษรใหม่ หน้าต่างแสดงตัวอย่างจะยังคงแสดงแบบอักษรเริ่มต้น แต่คุณจะมีแบบอักษรที่คุณเลือกพร้อมกับแว่นตาและหมวกนิรภัย ดังนั้นไม่ต้องกังวล
คำถามที่พบบ่อย
เหตุใดฉันจึงไม่เห็นข้อมูลจาก OSD ในชุดหูฟัง
ตรวจสอบว่าคุณได้ระบุรูปแบบวิดีโอที่ถูกต้อง PAL หรือ NTSC แล้วลองสลับ หากยังคงไม่ทำงาน ให้ตรวจสอบคุณภาพการเดินสายไฟและการบัดกรีจากกล้องและเครื่องส่งไปยังโมดูล OSD
จะเปลี่ยนชื่อได้อย่างไร?
ใน Betaflight ให้แท็บ config เลื่อนลงมา จะมีช่องข้อความ "Craft name" คุณสามารถป้อนชื่ออื่นที่นั่นได้
อุปกรณ์พิเศษ Minim OSD ได้รับการพัฒนาสำหรับผู้ใช้ตัวควบคุม APM เพื่อซ้อนทับข้อมูลทางไกล OSD ตัวย่อมาจากการแสดงบนหน้าจอภาษาอังกฤษ ซึ่งหมายถึงการแสดงข้อมูลเพิ่มเติมบนหน้าจอของผู้ปฏิบัติงาน
ผู้ผลิตจีนสร้างทั้งตัวควบคุมการบิน - ตัวควบคุม HKPliot Mega, ArduFlyer และ OSD - MAVLink-OSD

ภายนอก Minim OSD นั้นไม่แตกต่างจาก MAVLink-OSD มากนัก มันเหมือนกับสำเนาของบอร์ดที่ชิปหลักถูกหมุน 45 องศา นอกจากนี้ MAVLink-OSD ไม่มีจัมเปอร์สำหรับเลือกประเภทของสัญญาณวิดีโอและรวมพลังของชิ้นส่วนดิจิทัลและแอนะล็อก
OSD ขั้นต่ำ v1.0 มีปัญหาเรื่องความร้อนสูงเกินไปเมื่อใช้ไฟกล้อง 12 โวลต์ ปัญหานี้ได้รับการแก้ไขแล้วใน v1.1
เนื่องจากฮ่องกงมีปัญหาในการจัดส่งเมื่อสิ้นปี 2556 ฉันจึงสั่ง MAVLink-OSD จาก RCTimer

สำหรับการเขียนโปรแกรม คุณจะต้องมีอแด็ปเตอร์ FTDI ดังนั้น ร่วมกับ MAVLink-OSD ฉันจึงใช้อะแดปเตอร์ FTDI Tool V1.0 http://www.rctimer.com/product_684.html ทันที

ในการกำหนดค่าและแฟลชอุปกรณ์ คุณจะต้องใช้ซอฟต์แวร์พิเศษที่เรียกว่า ArduCam-OSD ดาวน์โหลดซอฟต์แวร์และเฟิร์มแวร์ ArduCam-OSD ล่าสุดที่นี่ http://code.google.com/p/arducam-osd/downloads/list ในขณะนี้ เวอร์ชันปัจจุบันคือ 2.0
คุณยังสามารถติดตั้งเฟิร์มแวร์สำรองได้ โปรเจ็กต์นี้เรียกว่า minimosd-extra ข้อมูลอยู่ที่นี่ https://code.google.com/p/minimosd-extra/ สำหรับเฟิร์มแวร์ คุณจะต้องมียูทิลิตี้ของคุณเอง - MinimOSD-Extra Config Tool ตามกฎแล้วไฟล์เก็บถาวรจะมียูทิลิตี้และเฟิร์มแวร์ คุณสามารถดาวน์โหลดได้ที่นี่ https://code.google.com/p/minimosd-extra/downloads/list ตาลุกวาวจากหลายเวอร์ชั่น
ฉันห่อบอร์ดและอะแดปเตอร์ด้วยฟิล์มหด
ขั้วต่อคอนโทรลเลอร์สำหรับการเชื่อมต่อไม่สะดวกมาก แบบ 6 ขา โดยไม่มีการป้องกัน "เข้าใจผิด" พินทั้งหมดใช้สำหรับการเขียนโปรแกรม แต่ใช้เพียง 4 พินเพื่อเชื่อมต่อกับตัวควบคุมการบิน
สำหรับการตั้งโปรแกรมก็ยังคงต้องหาสาย mini-USB

สำหรับคอนเน็กเตอร์แบบสี่พินทุกอย่างซับซ้อนกว่าที่นี่ หากปะปนกันและเชื่อมต่อไม่ถูกต้อง อาจมีควันออกมา
เชื่อมต่อ OSD กับตัวควบคุมการบินในขั้วต่อ telemetry ต้องต่อสายเข้ากับ OSD กับพินกลาง: GND, VCC, RX, TX
หากเราใช้โมเด็มวิทยุ เราจะเชื่อมต่อแบบขนานกัน เลยต้องบัดกรีสาย Y

ภาพถ่ายแสดงสายไฟสำหรับคอนโทรลเลอร์ AIOP ซึ่ง GPS เชื่อมต่อกับขั้วต่อเดียว
ฉันไม่ได้ถอดสายที่ไปยัง TX ของ OSD ของฉัน เพื่อให้มันเป็นสากล คุณไม่มีทางรู้ว่าฉันจะยังใช้สายนี้ได้ที่ไหน
ควรสังเกตว่าถ้าคุณไม่ใช้ 5 โวลต์กับส่วนแอนะล็อกของบอร์ด บอร์ดจะเงียบ

แหล่งข้อมูลบางอย่างเสนอให้สร้างบอร์ดใหม่และจ่ายไฟให้กับส่วนแอนะล็อกจากดิจิทัล แต่ฉันไม่ได้ทำ เนื่องจากมีความเห็นว่าอาจมีการรบกวนเกิดขึ้น
สำหรับผู้ที่ตัดสินใจเชื่อมต่อจากแหล่งพลังงานเดียววงจรจะเป็นดังภาพ

ขณะนี้ฉันมีชิ้นส่วนแอนะล็อกที่ขับเคลื่อนโดยเครื่องส่งสัญญาณวิดีโอ ซึ่งฉันได้พูดถึงไปแล้วในบทความที่แล้ว
ArduCAM OSD Config
เริ่มต้นด้วยยูทิลิตี้ ArduCAM OSD Config ดั้งเดิม ในขณะนี้ เวอร์ชันปัจจุบันคือ 2.1.2.0
ในองค์ประกอบหลัก ควรเน้นเมนูโปรแกรม รวมทั้งแท็บสามแท็บที่สลับระหว่างหน้าจอต่อไปนี้: Config, Panel 1, Panel 2
Config ทุกอย่างชัดเจนมากที่นี่
ก่อนอื่น เลือกหมายเลขพอร์ตและคลิกปุ่มอ่านจาก OSD

ควรสังเกตว่าประเภทของสัญญาณวิดีโอ NTSC - PAL จะเปลี่ยนผ่านเมนูของโปรแกรมโหมดวิดีโอ รายการเมนูไฟล์ช่วยให้คุณสามารถบันทึกและโหลดการตั้งค่าของคุณ หรือไปที่การตั้งค่าเริ่มต้น ในเมนูตัวเลือก คุณสามารถเปิดใช้งานโหมดกริดสำหรับ Panel1 และ 2 อัปเดตเฟิร์มแวร์ เลือกภาพพื้นหลัง ใช้บันทึกสำหรับการตั้งค่า เพิ่มแบบอักษรของคุณเอง

แผงที่ 1 ใช้เพื่อปรับแต่งข้อมูลที่แสดงบนวิดีโอสำหรับหน้าจอแรก การสลับช่องสัญญาณถูกตั้งค่าเป็นช่องสัญญาณควบคุมวิทยุฟรี OSD Toggle Channel

ดังนั้น สำหรับหน้าจอที่สอง เราตั้งค่าแผง 2

เฟิร์มแวร์ได้รับการอัพเดตโดยใช้ยูทิลิตี้เดียวกัน

MinimOSD-เครื่องมือกำหนดค่าพิเศษ
เมื่อเราเปิดโปรแกรม MinimOSD-Extra Config Tool ดูเหมือนว่าเราผสมโฟลเดอร์ต่างๆ และเปิด ArduCAM OSD Config อีกครั้ง นี่เป็นความประทับใจแรกพบ จริงๆ แล้วคล้ายกันมาก แต่มีการตั้งค่ามากกว่านี้
ลองดูความแตกต่างหลัก
รายการแรกคือตัวเลือกประเภทรุ่น: เครื่องบิน, คอปเตอร์
เพิ่มตัวเลือกเพื่อสลับหน้าจอโดยอัตโนมัติเป็นหน้าจอที่ระบุในเมนูแบบเลื่อนลง (คำเตือนสวิตช์แผงอัตโนมัติ) เมื่อมีคำเตือนเกิดขึ้น สิ่งนี้จำเป็น ตัวอย่างเช่น เมื่อข้อมูลทั้งหมดถูกลบออกจากหน้าจอที่สอง เพื่อไม่ให้มีอะไรมารบกวนมุมมอง
คุณสามารถเลือกแสดงแบตเตอรี่เป็นเปอร์เซ็นต์หรือ mA
และอีกหนึ่ง Show sign before value block ซึ่งมีหน้าที่แสดงไอคอนก่อนค่า

หน้าจอแรก

หน้าจอที่สอง

ผล
อันดับแรก ฉันติดตั้งเฟิร์มแวร์ผ่าน ArduCAM OSD Config

โดยหลักการแล้วทุกอย่างเป็นปกติ แต่มีสิ่งหนึ่งที่รบกวนจิตใจซึ่งแสดงดังต่อไปนี้
หลังจากเชื่อมต่ออุปกรณ์แล้ว ฉันสังเกตเห็นบนหน้าจอว่าข้อมูลทางด้านซ้ายบางส่วนถูกตัดออก ไอคอนที่อยู่ด้านหน้าค่าพารามิเตอร์หายไปครึ่งหนึ่ง ฉันตัดสินใจลองเปลี่ยนประเภทสัญญาณเป็น PAL ส่งผลให้สัญญาณแย่ลงไปอีก ตัดด้านบนและด้านล่างของหน้าจอออก ฉันจึงคืนเป็น NTSC ปล่อยให้อยู่ด้านเดียว ไม่ใช่สามด้าน โดยเฉพาะอย่างยิ่งเมื่อคุณสามารถลองแก้ไขข้อบกพร่องทางด้านซ้ายนี้ได้

ข้อมูลที่ย้ายบล็อกอักขระหนึ่งตัวไปทางขวา

การผ่าตัดไม่เจ็บปวดมีพื้นที่เพียงพอสำหรับสิ่งนี้


ส่งผลให้ทุกอย่างเรียบร้อยดี ไอคอนต่างๆ สามารถมองเห็นได้ชัดเจน ข้อมูลสามารถอ่านได้บนหน้าจออย่างสมบูรณ์
แต่ติดตั้งเฟิร์มแวร์ MinimOSD-Extra 2.4 R726 แล้ว แต่มันเริ่มสร้างความอับอายให้กับหน้าจอ

ภาพไม่สามารถอ่านได้ ข้อมูลสับสนทั่วทั้งหน้าจอ

ดาวน์โหลดเวอร์ชันก่อนหน้า 2.2

ด้วยเฟิร์มแวร์เวอร์ชันนี้ ข้อมูลเริ่มแสดงโดยไม่มีการบิดเบือน

ข้อสรุป
อุปกรณ์ขนาดกะทัดรัดและราคาไม่แพง ค่อนข้างเป็นสากล โดยจะใช้ทั้งกับบอร์ด ArduPilot Mega (APM) ดั้งเดิม และโคลน HKPILOT Mega, ArduFlyer ตลอดจนคอนโทรลเลอร์ซีรีส์ AIO (All-In-One) ที่มีเฟิร์มแวร์ MPNG หรือ MultyWii มีข้อมูลเกี่ยวกับการเชื่อมต่อกับตัวควบคุม DJI Naza ในฟอรัม แต่ต้องใช้หัวแร้งในมือของคุณ
ข้อเสียอย่างเดียวคือขั้วต่อหกพินบนบอร์ด ซึ่งเราเชื่อมต่อสายเคเบิลกับขั้วต่อสี่พิน สามารถมีได้หลายรูปแบบ หากคุณทำผิดพลาด คุณสามารถเผากระดานได้ เนื่องจากไม่มีการป้องกัน
คุณต้องจำไว้ว่าให้จ่ายไฟให้กับส่วนดิจิตอลและอนาล็อกของบอร์ด มิฉะนั้น มันจะไม่ทำงาน เลือกวิธีโภชนาการแบบไหนที่นี่จะสะดวกสำหรับใครซักคน
แน่นอน ฉันชอบ MinimOSD-Extra มากกว่า เพราะช่วยให้คุณสามารถทำการตั้งค่าเพิ่มเติมที่ไม่ได้อยู่ใน ArduCam OSD Config แต่เมื่อมันปรากฏออกมา เรายังต้องหาเวอร์ชันเสถียร ฉันเจอข้อเท็จจริงที่ว่าด้วยเฟิร์มแวร์บางตัว ข้อมูลออกในวิดีโอเสีย ฉันจัดการเพื่อค้นหาเวอร์ชันที่ใช้งานได้ไม่ใช่ครั้งแรก ดังนั้น ฉันจึงไม่มีตัวเลือก MinimOSD-Extra บางตัว น่าเสียดาย นี่เป็นโครงการโอเพ่นซอร์สจำนวนมากที่เป็นลบ
ดังนั้นจึงเป็นที่น่าสังเกตว่า ArduCam-OSD Config นั้นเสถียรและผ่านการพิสูจน์แล้วมากกว่า
ตัวควบคุมทำการแสดงข้อมูลซ้อนทับที่มีคุณภาพบนวิดีโอ ข้อความจะค่อนข้างชัดเจนและอ่านง่ายบนหน้าจอขนาดเล็ก ฉันไม่ได้สังเกตเห็นการชะลอตัวใด ๆ ในการแสดงข้อมูล
OSD เป็นอุปกรณ์เสริมที่มีประโยชน์สำหรับการบินด้วยกล้อง ในบทความนี้ เราจะมาดูกันว่า OSD คืออะไร มันเชื่อมต่อกับอุปกรณ์ FPV ของเราอย่างไร และสุดท้ายคือภาพรวมของความสามารถของ OSD ต่างๆ
หากคุณมีคำถามใด ๆ - แจ้งให้เราทราบในความคิดเห็น
OSD คืออะไรและมีข้อดีอย่างไร
OSD ย่อมาจาก On Screen Display - เช่น แสดงบนหน้าจอหรือเมนูบนหน้าจอ (กล่าวคือ ที่ด้านบนของภาพหลัก มักจะแสดงข้อมูลเพิ่มเติมจากกล้อง ซึ่งส่วนใหญ่เป็นข้อความ) ในงานอดิเรกของเรา OSD คือแผงวงจรพิมพ์ขนาดเล็กที่แสดงข้อมูลการบินที่ด้านบนของภาพกล้องของคุณ ซึ่งช่วยให้คุณสามารถตรวจสอบสถานะของ quadrocopter ได้โดยตรงระหว่างการบินด้วยกล้อง
หากคุณมีเซ็นเซอร์และ OSD ที่เหมาะสม คุณจะสามารถดูข้อมูลการบินได้จากแว่นตาหรือจอภาพของคุณ เช่น แรงดันแบตเตอรี่ ปริมาณกระแสไฟที่มอเตอร์และอุปกรณ์อิเล็กทรอนิกส์อื่นๆ ดึงออกมา ระดับความสูงของคุณ พิกัด GPS ฯลฯ
สิ่งนี้ทำให้การบินไปรอบๆ กล้องมีความปลอดภัยมากขึ้น เพราะคุณสามารถเห็นระดับแบตเตอรี่ รู้ว่าจะลงจอดเมื่อใด บินไปไกลแค่ไหนแล้ว และต้องกลับไปในทิศทางใด
OSD ไม่จำเป็นสำหรับการบินของกล้อง แต่อย่างที่คุณเห็นว่ามันมีประโยชน์อย่างยิ่ง คนส่วนใหญ่ซื้อ SimpleOSD อย่างน้อยเพื่อดูแรงดันไฟฟ้าของแบตเตอรี่ ซึ่งเป็นสิ่งจำเป็นเพื่อหลีกเลี่ยงการคายประจุมากเกินไป (หากคุณบินไปไกล เสียงไซเรนที่ส่งสัญญาณว่าแบตเตอรี่เหลือน้อยจะไม่ได้ยิน)
ชนิดข้อมูลที่สามารถแสดงได้โดยใช้ OSD
รูปภาพแสดงชุดข้อมูลที่ใช้บ่อยที่สุดเมื่อบินไปรอบๆ กล้อง

ตัวจับเวลา
ขึ้นอยู่กับประเภทของ OSD ของคุณ นี่อาจเป็นเวลาบิน (เริ่มจากตอนที่คุณบินขึ้น) หรือเวลาปฏิบัติการ (เริ่มจากช่วงเวลาที่เปิดเครื่องควอดคอปเตอร์) OSD บางตัวอนุญาตให้คุณแสดงตัวจับเวลาได้หลายประเภท
แรงดันแบตเตอรี่
OSD เกือบทั้งหมดอนุญาตให้คุณแสดงแรงดันไฟฟ้าได้ นี่คือข้อมูลที่สำคัญที่สุดเมื่อบินไปรอบๆ กล้อง คุณจึงรู้ว่าจะลงจอดเมื่อใด (ปกติฉันจะลงจอดเมื่อแรงดันไฟฟ้าลดลงเหลือ 3.5V ต่อเซลล์)
การบริโภคในปัจจุบัน
หากคุณมีเซ็นเซอร์ปัจจุบัน คุณสามารถติดตามว่ามอเตอร์กำลังดึงกระแสไฟเท่าใดและแบตเตอรี่ของคุณใช้ mAh ไปเท่าใดแล้ว
RSSI
RSSI เป็นตัวบ่งชี้ความแรงของสัญญาณของเครื่องส่งสัญญาณของคุณ ซึ่งมักจะแสดงเป็นเปอร์เซ็นต์ ยิ่งบินไกล สัญญาณยิ่งอ่อน ข้อมูลนี้จะช่วยให้คุณรู้ว่าควรหันหลังกลับเมื่อใด
RSSI คือเอาต์พุตจากตัวรับสัญญาณควบคุมของคุณ ซึ่งมักจะอยู่ในรูปแบบ PWM ดังนั้น คุณอาจต้องใช้ตัวแปลง D/A และตัวกรองความถี่ต่ำ
คำเตือน
OSD บางตัวสามารถแสดงการเตือน คำเตือนต่างๆ ได้ ซึ่งคุณในฐานะผู้ใช้จะต้องตั้งค่าขีดจำกัดสำหรับพารามิเตอร์ เช่น แรงดันแบตเตอรี่ ค่า RSSI เป็นต้น
โหมดเครื่องบิน
แสดงโหมดการบินปัจจุบันของเครื่องบินของคุณ ข้อมูลนี้จะมีประโยชน์หากคุณสลับไปมาระหว่างโหมดต่างๆ เช่น Loiter (โฮเวอร์อยู่กับที่) โหมดแมนนวล โหมดปรับระดับตัวเอง ดังนั้นคุณจึงไม่ต้องสงสัยว่าเครื่องบินอยู่ในโหมดใด ในการทำเช่นนี้ คุณจะต้องเชื่อมต่อตัวควบคุมการบินกับ OSD
จีพีเอส
เมื่อใช้ GPS คุณจะไม่เพียงได้รับพิกัดของโดรนเท่านั้น แต่ยังรวมถึงระดับความสูงด้วย (แม้ว่าจะแม่นยำกว่าการใช้บารอมิเตอร์หรือโซนาร์ก็ตาม) ต้องขอบคุณการคำนวณที่ชาญฉลาด เราจึงสามารถเห็นความเร็วเหนือพื้นดิน ระยะทางไปยังจุดเริ่มต้นและพิกัดของมัน (การแสดงกราฟิกของทิศทางไปยังจุดเริ่มต้นเป็นสิ่งที่มีประโยชน์มาก โดยเฉพาะอย่างยิ่งหากคุณหลงทางเล็กน้อย)
ขอบฟ้า
ขอบฟ้าเสมือนจริงจะช่วยให้คุณเข้าใจว่าโดรนเอียงในอวกาศอย่างไร
การเชื่อมต่อ OSD ในกล้อง เครื่องส่งวิดีโอ และตัวควบคุมการบิน
ฉันจะแบ่ง OSD ทั้งหมดออกเป็น 3 ประเภท:
- OSD แบบสแตนด์อโลน
- OSD ขึ้นอยู่กับตัวควบคุมการบิน
- ลูกผสม
OSD แบบสแตนด์อโลนจะเชื่อมต่อกับกล้องและเครื่องส่งวิดีโอเท่านั้น และไม่สื่อสารกับตัวควบคุมการบิน บางครั้งสามารถเชื่อมต่อโดยตรงกับ GPS หรือเซ็นเซอร์อื่นๆ เพื่อให้สามารถเข้าถึงการอ่านได้ ตัวอย่างที่ดีของประเภทนี้คือ Skylark OSD (+GPS และเซ็นเซอร์ปัจจุบัน) และ Super Simple OSD
OSD ที่ขึ้นกับตัวควบคุมจะใช้ข้อมูลจากตัวควบคุมการบินเท่านั้น โดยปกติแล้วจะผ่านทางพอร์ตอนุกรม (RX/TX) OSD เองไม่ได้ทำอะไรนอกจากแสดงข้อมูลนี้ MinimOSD จาก Hobbyking เป็นตัวอย่างที่ดีของ OSD ประเภทนี้ (หากเวอร์ชันนั้นไม่มีการแก้ไข เช่น KV mod) ข้อดีของประเภทนี้คือ OSD ใช้ข้อมูลที่ได้รับจากเซ็นเซอร์ของตัวควบคุม ซึ่งหมายความว่าตัวควบคุมเองใช้ข้อมูลนี้เพื่อทำให้การจัดการและการควบคุมง่ายขึ้น ในกรณีของ OSD แบบสแตนด์อโลน ข้อมูลจากเซ็นเซอร์ที่เชื่อมต่อกับ OSD จะไม่สามารถใช้งานได้โดยผู้ควบคุมการบิน
OSD ชนิดไฮบริดสามารถใช้เป็น OSD แบบสแตนด์อโลน (ด้วยฟังก์ชันที่จำกัด) และยังสามารถเชื่อมต่อกับตัวควบคุมเพื่อเพิ่มชุดข้อมูลการบินที่แสดง MinimOSD พร้อม KV mod เป็นตัวอย่างที่ดีของ OSD ประเภทนี้: หากใช้เป็นสแตนด์อโลน คุณจะเห็นเฉพาะ RSSI และแรงดันไฟฟ้า แต่เมื่อเชื่อมต่อกับตัวควบคุมด้วย GPS คุณจะเห็นโหมดการบินปัจจุบัน พิกัด GPS ระดับความสูง ฯลฯ
การเชื่อมต่อที่ง่ายที่สุด - OSD แบบสแตนด์อโลน
ตัวอย่างเช่น เชื่อมต่อ Hobbyking Super Simple OSD กับกล้อง FPV, เครื่องส่งวิดีโอ และแบตเตอรี่ลิเธียม 3S

ในทางทฤษฎี คุณสามารถตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่ก้อนที่สองได้โดยใช้พอร์ต Bat2
การเชื่อมต่อ OSD ไฮบริด
ฉันทราบว่าในกรณีนี้ OSD จะวัดแรงดันแบตเตอรี่และระดับ RSSI อย่างอิสระ (แม้ว่าจะสามารถเชื่อมต่อกับคอนโทรลเลอร์และส่งข้อมูลผ่านพอร์ตอนุกรมได้ แต่ตัวเลือกทั้งสองก็ใช้ได้ดี)
หากคุณต้องการแสดงพิกัด ทิศทางไปยังจุดเริ่มต้นและระยะทางไปที่นั่น คุณต้องเชื่อมต่อ GPS กับ Naze32
OSD ที่เคยใช้ไปแล้ว
MinimOSD กับ KV Team Mod
ปัจจุบัน MinimOSD เป็น OSD ที่ฉันโปรดปรานและเป็น OSD ที่ฉันใช้ ด้วยการดาวน์โหลดเฟิร์มแวร์ที่เหมาะสม MinimOSD สามารถใช้กับบอร์ด Naze32, CC3D, Multiwii, APM และ PixHawk นี่เป็นกระดานที่ดีมากที่สามารถแสดงข้อมูลเที่ยวบินทั้งหมดที่มีอยู่จากเซ็นเซอร์ได้

MinimOSD สามารถแสดงข้อมูลใด ๆ ที่มีอยู่จากเซ็นเซอร์
Hobbyking และ Banggood ขาย MinimOSD แต่มีเวอร์ชันดั้งเดิมซึ่งไม่มีพินเพิ่มเติมที่ด้านข้างสำหรับ RSSI แรงดันแบตเตอรี่ ฯลฯ ฉันจะไม่ติดต่อพวกเขาหากสามารถซื้อ MinimOSD KV Mod ได้
MinimOSD ไมโคร

OSD เดียวกันกับที่อธิบายไว้ข้างต้น ความแตกต่างคือขนาดที่เล็กกว่า นอกจากนี้ยังไม่มีตัวแปลง 12V -> 5V อยู่ด้วย แต่สิ่งนี้ไม่สำคัญเพราะ อย่างไรก็ตาม ไม่มีใครใช้ตัวแปลงนี้เนื่องจากบอร์ดร้อนเกินไป
BrainFPV
บอร์ดนี้ยังแสดงสิ่งใดด้วยเซ็นเซอร์ที่เหมาะสม

ในบทความ เราจะพิจารณาการเชื่อมต่อ การแฟลช และการกำหนดค่า MinimOSD และเราจะตอบคำถามด้วยว่าจะทำอย่างไร - ถ้ามีอะไรผิดพลาดและต้องทำอย่างไร - เพื่อให้ทุกอย่างไม่จบลงอย่างน่าเศร้า
« Petka - อุปกรณ์!?!? -สามร้อย!!! -สามร้อยเท่าไหร่??? - แล้วเครื่องดนตรีล่ะ?
ระบบปฏิบัติการขั้นต่ำ ผ้าพันคอราคาถูกและมีประโยชน์มาก ช่วยให้คุณเห็นสิ่งที่เกิดขึ้นตอนนี้กับคอปเตอร์ - แรงดันไฟฟ้าปัจจุบัน จำนวนแอมแปร์ที่ใช้ไป จำนวนดาวเทียมระบุตำแหน่งทั่วโลก และจะไม่ทำให้คุณ "หลงทาง" บนท้องฟ้า เป็นไปไม่ได้ที่จะหลงทางบนท้องฟ้าคุณพูด? และนี่เป็นไปได้มาก เริ่มต้นจากชั้นประถมศึกษา "มันเริ่มขึ้นแล้วโอ้ แต่ทุกอย่างต่างจากข้างบน ... โอ้ฉันอยู่ที่ไหน" ลงท้ายด้วยสภาพการบินที่ยากลำบากเช่นบินในความมืดหรือฝนตกหรือบินเข้าไปโดยไม่ได้ตั้งใจ คลาวด์ดังในวิดีโอด้านล่าง:
ในนาทีที่สี่ ลูกศรช่วย "กลับบ้าน" เท่านั้นที่ระบุว่าจะบินไปที่ไหน
โอเค โอเค พอเนื้อเพลง ไปฝึกกัน!
การตระเตรียม.
ดังนั้น คุณสั่ง MinimOSD สำหรับตัวคุณเอง บน Banggood หรือ Hobbyking หรือ RCTimer ไม่ว่าจะอยู่ที่ไหนและมีสิ่งนี้:
มือของฉันคันที่จะเชื่อมต่อกับเวิร์กสเตชันและดูว่ามันแสดงอะไร แต่คุณไม่จำเป็นต้องทำทั้งหมดในครั้งเดียว! มันเต็มไปด้วยการสั่งซื้อ OSD ใหม่ - และนี่คือเวลาที่สูญเสียไป (ซึ่งเป็นสิ่งสำคัญ) และเสียเงินแน่นอน
มีชิปขนาดใหญ่สองตัวบนกระดาน: ATMEGA328P และ MAX7456 ไมโครเซอร์กิตตัวแรก (ไมโครคอนโทรลเลอร์ เพื่อให้แม่นยำยิ่งขึ้น) มีหน้าที่ในการสื่อสารกับผู้ควบคุมการบิน ("ส่วนดิจิทัล" ของบอร์ด) และอย่างที่สองคือ OSD ขาวดำแบบช่องสัญญาณเดียว (OnScreenDisplay - เมนูบนหน้าจอ) จาก Maxim ให้เรียกว่า "ส่วนแอนะล็อก" ของบอร์ด ดังนั้น MAX7456 นี้เป็นไมโครเซอร์กิตที่ค่อนข้างไม่แน่นอน เธอไม่ชอบความร้อนสูงเกินไปไม่ชอบการกระโดดที่คมชัดระหว่างพื้น "ดิจิตอล" และ "แอนะล็อก" - ในระยะสั้นมันไหม้ได้ง่าย และโชคดีที่มีคนจีนขี้เกียจไม่เคยบัดกรีแผ่นระบายความร้อนปกติของไมโครเซอร์กิต (บน "พุง") หากคุณใช้ผ้าเช็ดหน้าในรูปแบบที่มา - MAX จะเผาไหม้ - รับประกัน 80% เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้น เราประสานสามรูที่ทำเครื่องหมายไว้ในรูปภาพด้านล่าง

ในการทำเช่นนี้ให้ใส่บัดกรีบาง ๆ (เส้นผ่านศูนย์กลาง 1 มม. ขอแนะนำให้ใช้ฟลักซ์ทันที) เข้าไปในรูแล้วให้ความร้อนด้วยหัวแร้ง:

และนี่คือผลลัพธ์ (การบัดกรีไม่ดีนัก แต่อย่างดีที่สุด - คุณจะทำได้ดีกว่านี้!)

ตอนนี้เกี่ยวกับคุณสมบัติของการเชื่อมต่อ คนที่เอาใจใส่สังเกตว่าฉันบัดกรีจัมเปอร์จากด้านบน มีหลายวิธีในการเชื่อมต่อ MinimOSD และสำเนาจำนวนมากเสียหายซึ่งดีกว่าหรือถูกต้องกว่าหรือให้การรบกวนน้อยลง ฉันใช้วิธีการเชื่อมต่อร่วมกับกราวด์ดิจิตอลและแอนะล็อกและแหล่งจ่ายไฟจาก 5 โวลต์จากส่วน "ดิจิทัล" เนื่องจาก minimOSD กินไฟค่อนข้างมาก จึงเป็นการดีกว่าที่จะจ่ายไฟให้กับบอร์ดจากแหล่งพลังงานที่แยกจากกัน เกือบจะมีลักษณะเช่นนี้:

นั่นคือที่ด้านบนฉันบัดกรีจัมเปอร์เพื่อรวมโลกเข้าด้วยกัน และคุณยังคงต้องทิ้งจัมเปอร์หนึ่งตัวที่ด้าน "ด้านหน้า" ของกระดาน

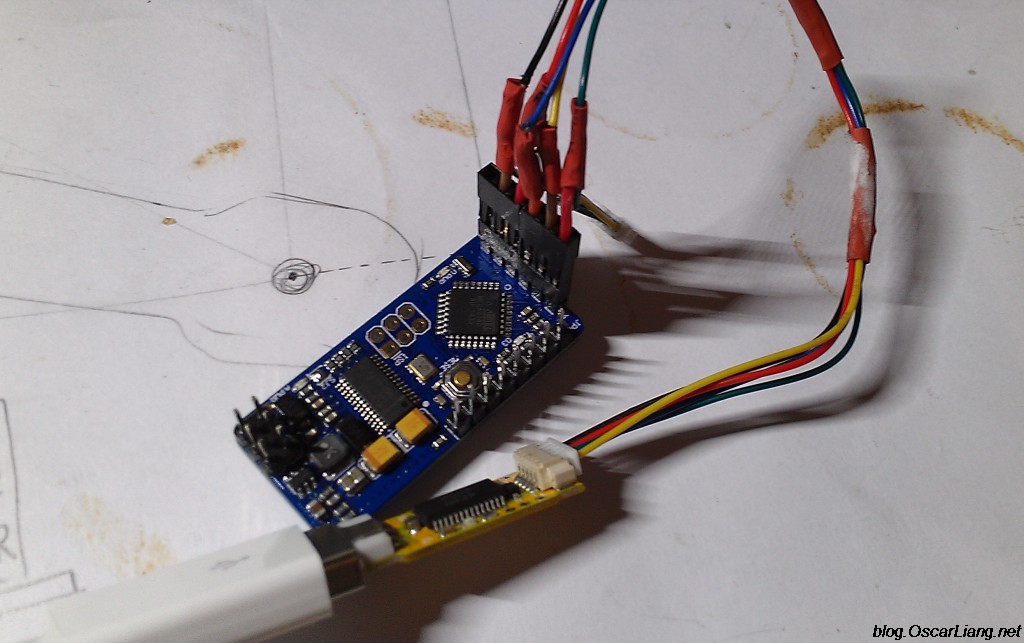
การเชื่อมต่อและการติดตั้ง
ทุกอย่างบัดกรีแล้วตอนนี้ผ้าพันคอของเราพร้อมที่จะเชื่อมต่อกับคอมพิวเตอร์แล้ว ในการดำเนินการนี้ เราต้องใช้อะแดปเตอร์ FTDI (เช่น เปิด หรืออะแดปเตอร์ USB-UART TTL อื่นๆ)

เราเชื่อมต่อโดยใช้สายไฟ 5 เส้นแผนภาพการเชื่อมต่อมีดังนี้: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (ด้าน OSD) - เราเชื่อมต่อเข้ากับอะแดปเตอร์ FTDI 1. DTR , 2. Rxi, 3 .Txo, 4.VCC, 5.GND. นี่คือภาพการเชื่อมต่อสำหรับฉัน:

ถ้าไม่ชัดเจนให้ดูวิดีโอนี้โดยเฉพาะที่ 1:03
ตอนนี้จะดาวน์โหลดอะไรและจะกำหนดค่าอย่างไร อย่างแรก ฉันจะบอกว่าสำหรับคอปเตอร์และสำหรับเครื่องบิน เฟิร์มแวร์นั้นแตกต่างกัน นอกจากนี้ยังมีเฟิร์มแวร์สำหรับ Multivia (kvTeam) และยังมี mod แยกจากการทำงานอิสระ (ไม่มีตัวควบคุมการบิน) ไปจนถึงการเชื่อมต่อกับ Naza
แต่ที่นี่เรากำลังพิจารณาเคส "คลาสสิก" - คอปเตอร์บนคอนโทรลเลอร์ AWP หน้าอย่างเป็นทางการของโครงการ หน้าดาวน์โหลด (สำหรับคอปเตอร์ภายใต้ AWP คุณต้องโหลด ExtraCopter) แต่พวกนี้เป็นรุ่นเก่าๆ มีคนดัดแปลงค่อนข้างเยอะตั้งแต่นั้นมา เฟิร์มแวร์ที่ทันสมัยอยู่ใน. ในขณะที่เขียนสิ่งนี้ นี่คือเฟิร์มแวร์ R800 ซึ่งอยู่บน Ya.Disk (ผู้ใช้ MinimOSD_Extra, รหัสผ่าน Top_Secret)
ไฟล์เก็บถาวรประกอบด้วยเฟิร์มแวร์ (ไฟล์ HEX) ไฟล์ที่มีฟอนต์ (mcm - ไฟล์) และตัวโปรแกรม (OSD_Config.exe)
ขั้นแรกไปที่ตัวจัดการอุปกรณ์และตรวจสอบความเร็วของพอร์ต FTDI (เราจะตั้งค่า 115200):

เราเปิดตัวโปรแกรม OSD_Config.exe เลือกพอร์ตกดปุ่ม "อ่านจาก OSD" ควรมีข้อความเกี่ยวกับการอ่านที่สำเร็จ เนื่องจากไม่รู้ว่าเฟิร์มแวร์ตัวไหนที่โหลดมาจากโรงงาน เพื่อไม่ให้เกิดปัญหาในอนาคต เราจะทำการเติมเฟิร์มแวร์ใหม่ให้ ในการดำเนินการนี้ ให้คลิกเมนู Optios> Update Firmware

เลือกไฟล์และอัปโหลด
เราจะได้รับข้อความเกี่ยวกับเฟิร์มแวร์ที่สำเร็จ

จากนั้นคอนโทรลเลอร์จะเริ่มต้นและโหลดการตั้งค่าลงในโปรแกรมซึ่งจะถูกรายงาน

ได้เวลาดาวน์โหลดไฟล์ฟอนต์ที่ตรงกับเฟิร์มแวร์ (หากยังไม่เสร็จสิ้น ลักษณะของ OSD อาจดูตลกหรืออ่านไม่ได้) กดเมนู Option>Update Charset,

เลือกไฟล์ MCM แล้วอัปโหลด

เรากำลังรอความพร้อม

หลังจากเท ตัวควบคุมจะเริ่มต้นอีกครั้ง



ให้ฉันอธิบายเล็กน้อย:
ช่อง RSSI - แปลง RSSI เป็นเปอร์เซ็นต์ โดยที่ 5 โวลต์คือ 255 (สูงสุดเป็นฐานแปด) และตัวรับสัญญาณ FRsky มีสัญญาณสูงสุด 3.3 โวลต์ หากคุณเลือกช่องทำเครื่องหมายเปิดใช้งาน RSSI RAW จากนั้นในหน้าจอ FPV เราจะเห็นข้อมูล "ดิบ" มันคือสิ่งที่เราสามารถขับเข้าไปในการตั้งค่าได้ หรือคุณสามารถพิมพ์ค่าของฉัน
ความละเอียดอ่อนอีกประการหนึ่ง - การสลับหน้าจอ OSD. อย่างที่คุณเห็น มีแผงข้อมูลสองแผง เราสามารถสลับไปที่ตัวเลือกการแสดงผลสามแบบ - screen1 (Panel1), screen2 (Panel2), หน้าจอเปล่าไม่มีข้อมูล (Disabled) ในการทำเช่นนี้ ก่อนอื่นเราต้องตัดสินใจว่าเราจะสลับระหว่างหน้าจออย่างไร ตัวอย่างเช่น หากเราสลับระหว่างหน้าจอโดยใช้สวิตช์แบบหมุนหรือแบบสามตำแหน่ง เราจะมีค่าสามช่วงตามช่องสัญญาณ (Panel1: 0-1233, Panel2: 1233-1467, Disabled: 1467- 1701). ในกรณีนี้ จะต้องปิดสวิตช์การสลับการหมุน และหากเราสลับด้วยสวิตช์สลับสองตำแหน่งแบบธรรมดา ก็สมเหตุสมผลแล้วที่จะเปิดใช้การสลับการหมุน ในเวลาเดียวกัน เมื่อเปิดสวิตช์สลับ เราจะสลับหน้าจอตามลำดับ (Panel1 -> Panel2 -> Disabled -> Panel1 ......) หากปิดสวิตช์สลับ การสลับระหว่างหน้าจอจะ หยุด. ช่องใดที่จะสลับหน้าจอจะถูกกำหนดในรายการดรอปดาวน์ชื่อ OSD Toggle Channel ฉันวางไว้ในช่องหมายเลข 6 และมีการซุ่มโจมตีอื่นที่บางคน (รวมถึงฉันด้วย) เริ่มสับสน - คำเตือนสวิตช์แผงอัตโนมัติ รายการนี้กำหนดหน้าจอที่จะเปลี่ยนไปหากมีคำเตือนที่กำหนดไว้ก่อนหน้านี้เกิดขึ้น ดูเหมือนว่าทุกอย่างชัดเจน คุณกำลังบินด้วยตัวเอง มีบางอย่างเกิดขึ้นในเที่ยวบิน OSD เปลี่ยนเป็นหน้าจอที่คุณถาม แต่นี่คือคำถาม - เราตั้งค่าการสลับระหว่างหน้าจอตามกฎแล้ว นี่คือการกำหนดค่าที่บ้าน คอปเตอร์ไม่บิน เราต้องการตรวจสอบ - หน้าจอไม่เปลี่ยน! แต่เนื่องจากปกติแล้วจะไม่มี GPS Fix ที่บ้าน กล่าวโดยย่อ คำเตือนก็ใช้ได้! ดังนั้นการสลับไปมาระหว่างหน้าจอ "ใช้งานไม่ได้" ... 🙂
ฉันไม่รู้ว่าพารามิเตอร์ที่เหลือต้องการคำชี้แจงหรือไม่ บางทีฉันจะเสริมบทความในภายหลัง
บอกได้คำเดียวว่าตอนตั้งค่าหน้าจอหลัก ไม่ควรดันทุกอย่างไปพร้อมกัน ทางที่ดีควรปิดทุกอย่างก่อน (ในคอลัมน์ด้านซ้าย) จากนั้นให้เปิดเฉพาะสิ่งที่คุณต้องการและวางไว้ที่ด้านขวาของหน้าจอทันที ฉันแนะนำให้เว้นที่ว่างไว้ที่ขอบของหน้าจอ มันสามารถถูกตัดออกโดยจอภาพหรือ DVR ด้วยสไตลัสหรือแว่นตา
ต่อไป อีกประเด็นสำคัญ - การตั้งค่า OSD ใน Mission Planner. สมมติว่าคุณได้เชื่อมต่อทุกอย่างตามที่ควรจะเป็น แต่แทนที่จะเป็นตัวเลขตลกและขอบฟ้าเทียม เราเห็นคำจารึกที่น่าเบื่อว่า "ไม่มีข้อมูล Mavlink" ซึ่งหมายความว่า OSD ใช้งานได้ ยินดีที่จะแสดงบางอย่างให้คุณดู แต่ไม่ได้รับข้อมูล นั่นคือไม่มีข้อมูลจากเวิร์กสเตชันมาที่พิน Rx สาเหตุแรกที่เป็นไปได้คือ สายไฟปะปนกันเมื่อเชื่อมต่อ ตรวจสอบว่า Rx จาก OSD เชื่อมต่อกับพอร์ต Tx บนเวิร์กสเตชัน เหตุผลประการที่สองที่เป็นไปได้คือตัวควบคุมไม่ได้กำหนดค่าให้ส่งข้อมูลไปยังพอร์ต COM ในการทำเช่นนี้ ในกรณีง่ายๆ บนแท็บ INITIAL SETUP > Optional Hardware > OSD คุณต้องเปิดปุ่ม เปิดใช้งาน Telemetry ในเวลาเดียวกัน MP จะกำหนดค่าพารามิเตอร์จำนวนหนึ่งโดยอัตโนมัติซึ่งอนุญาตให้คุณส่งข้อมูลไปยัง OSD หากปุ่มวิเศษนี้ไม่ช่วย คุณจะต้องตั้งค่าทุกอย่างด้วยมือเล็กๆ ในการดำเนินการนี้ ให้ไปที่แท็บ CONFIG / TUNING > Full Parameter List เลื่อนลงไปที่ตัวอักษร S แล้วตรวจสอบ (หรือแก้ไข) ค่าพารามิเตอร์:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
หากข้อมูลยังไม่มาและเรายังคงเห็นคำจารึกที่น่าเบื่อ“ ไม่มีข้อมูล Mavlink” คุณต้องตรวจสอบว่า OSD เชื่อมต่อกับพอร์ตที่ถูกต้องหรือไม่ (บทความพูดถึง UART0) คุณอาจต้องใช้พารามิเตอร์ SR1 ( เช่นเดียวกับที่อธิบายไว้ข้างต้น สำหรับพอร์ต UART1 เท่านั้น) อาจเป็นไปได้ว่า OSD จะไม่ทำงานสำหรับคุณพร้อมกับโมเด็ม telemetry - ในกรณีนี้ คุณอาจต้องเชื่อมต่อหรือถอดสาย Tx บน OSD ออก นอกจากนี้ยังมีข้อผิดพลาดที่ OSD ไม่ทำงานเมื่อเชื่อมต่อสาย USB กับคอมพิวเตอร์ หรือบางทีคุณแค่ทำให้สายไฟเลอะเทอะ ...
ฉันจะแบ่งปันอีกรูปหนึ่ง บนคอนโทรลเลอร์ของฉันเนื่องจากความผิดพลาด พอร์ตหลักสำหรับการวัดและส่งข้อมูลทางไกลหยุดทำงาน ฉันเพิ่งบัดกรีไปที่ UART0 แล้วฉันก็ชอบการเชื่อมต่อนี้

ที่นี่ฉันขับเคลื่อนโดยตรงจากคอนโทรลเลอร์ แต่มันเป็นข้อบังคับที่จะต้องตรวจสอบสิ่งที่เหลืออยู่ 5 โวลต์สำหรับตัวควบคุมเอง ในกรณีของฉัน ตัวควบคุมนั้นได้รับพลังงานจากตัวรับ และมันถูกตั้งค่าให้สูงกว่า 5 โวลต์เล็กน้อย ดังนั้น เมื่อพิจารณาถึงตัวรับและ minimOSD สำหรับ APM เอง มันจึงเป็น 5 โวลต์อย่างเคร่งครัด
จะต้องสัมผัสอีกจุดหนึ่ง หาก OSD กะพริบไม่ถูกต้อง แสดงว่าข้อผิดพลาด " ไม่สามารถคุยกับ bootloader ได้". ข้อผิดพลาดนี้แปลตามตัวอักษรว่า "ข้อผิดพลาดในการพูดคุยกับ bootloader" อาจเกิดขึ้นในกรณีที่สายพันกัน หรือเมื่อ bootloader ขัดข้อง หากทุกอย่างชัดเจนในกรณีของสายไฟ (ดูวิธีการเชื่อมต่ออย่างถูกต้องด้านบน) ในกรณีของ bootloader จำเป็นต้องมีขั้นตอนในการกู้คืนไมโครคอนโทรลเลอร์
การกู้คืน Bootloader
ในการทำเช่นนี้ เราจำเป็นต้องมีโปรแกรมเมอร์เป็นอย่างน้อย สะดวกกว่าในการใช้ USBasp

บางทีคุณอาจจะชอบอะแดปเตอร์นี้ (ISP10<>ไอเอสพี6)
 หรือสายนี้ (มีใน)
หรือสายนี้ (มีใน)

โดยทั่วไปไม่ทางใดก็ทางหนึ่ง เราเชื่อมต่อกับ ATMega328P โดยใช้โปรแกรมเมอร์
โดยทั่วไปยอมรับพินเอาต์ของขั้วต่อ ISP บนบอร์ด OSD โดยปกติการติดต่อครั้งแรกจะเป็นสี่เหลี่ยมจัตุรัส หากไม่เป็นเช่นนั้น ทางที่ดีควรตรวจสอบโดยดูที่ Vcc และ GND

สำหรับโปรแกรมเมอร์ หมุดมักจะถูกเซ็นชื่อ หากไม่เป็นเช่นนั้น โดยทั่วไปแล้วจะมีลักษณะดังนี้:

ในการทำเช่นนี้ ก่อนอื่นให้เลือกประเภทของโปรแกรมเมอร์

จากนั้นเลือกประเภทของกระดาน

และไมโครคอนโทรลเลอร์ประเภท


และรอประมาณหนึ่งนาทีจนกว่า bootloader จะโหลด (ดูที่แถบสถานะสีเขียวที่ด้านล่าง)
 จนกว่าจะมีข้อความปรากฏขึ้นว่า bootloader ได้แฟลชสำเร็จแล้ว
จนกว่าจะมีข้อความปรากฏขึ้นว่า bootloader ได้แฟลชสำเร็จแล้ว

(เราไม่สนใจข้อผิดพลาดด้านล่าง คุณต้องอัปเดตเฟิร์มแวร์ของโปรแกรมเมอร์)
ถัดไป - ไปที่ OSD_Config.exe กรอกเฟิร์มแวร์และแบบอักษรตามที่อธิบายไว้แล้ว คุณอาจต้องอัปโหลดเฟิร์มแวร์สองครั้ง (จำเป็นต้องใช้อีกครั้งสำหรับการเริ่มต้นคอนโทรลเลอร์ที่ถูกต้องหลังจากอัปโหลด bootloader)
นั่นคือทั้งหมดที่เกี่ยวกับ อยู่ดีๆใครไม่รู้ยังมีอีก หากมีอะไรไม่ชัดเจนในที่นี้ คุณสามารถ "อยู่" ดูที่นั่นได้
ขอให้โชคดีกับการติดตั้ง OSD บนควอดของคุณ!
ของคุณเสมอ Ganiev Timur - 5yoda5.
5yoda5#apmcopter
อัปเดต 11/11/2015:“ ทุกอย่างบัดกรีแล้วตอนนี้ผ้าพันคอของเราพร้อมที่จะเชื่อมต่อกับคอมพิวเตอร์แล้ว ในการดำเนินการนี้ เราต้องใช้อะแดปเตอร์ FTDI (เช่น บน RCTimer หรืออะแดปเตอร์ USB-UART TTL อื่นๆ)
อัปเดต 11/03/2016: เพิ่มรูปภาพ ISP pinout
หากคุณพบข้อผิดพลาดบนหน้า ให้คลิก Shift+Enterหรือแจ้งให้เราทราบ
ในคู่มือนี้ เราจะครอบคลุมทั้งเวอร์ชันปกติและเวอร์ชันไมโคร วิธีการตั้งค่าและใช้งานเฟิร์มแวร์ MW-OSD ตลอดจนวิธีเชื่อมต่อกับ Naze32 และเครื่องรับ
MinimOSD และ Micro MinimOSD คืออะไร?
แม้ว่าการติดตั้งจะซับซ้อนกว่า OSD อื่นๆ เช่น Super Simple OSD หรือ E-OSD ที่ฉันเสียบปลั๊กและทำงานทันที แต่ MinimOSD มีข้อดีมากมายและรูปลักษณ์ของหน้าจอสามารถปรับแต่งได้อย่างเต็มที่
คุณสมบัติที่มีประโยชน์ที่สุด: การแสดงพิกัด GPS รูปแบบและแบบอักษรที่ปรับแต่งได้ โดยใช้เมนูบนหน้าจอ คุณสามารถเปลี่ยนค่าสัมประสิทธิ์ของตัวควบคุม PID อัตรา ฯลฯ ตัวอย่างสิ่งที่สามารถแสดงบนหน้าจอได้
การตั้งค่าสัมประสิทธิ์ PID ผ่านเมนู:

ขนาด, น้ำหนัก, พิน, การบัดกรีเพื่อลดขนาด
MinimOSD ขนาดเต็ม
OSD นี้มีมาหลายปีแล้ว ข้อดีของเวอร์ชันนี้ (MinimOSD พร้อม KV Mod) คือมีหมุดด้านข้างสำหรับเชื่อมต่อเซ็นเซอร์ปัจจุบัน, RSSI, เซ็นเซอร์แรงดันไฟ ฯลฯ ก่อนหน้านี้ เราต้องประสานสายไฟกับขาของชิปโดยตรงอย่างระมัดระวัง และนี่เป็นเรื่องยากมาก รุ่นนี้ทำให้ชีวิตง่ายขึ้นมาก ฉันซื้อบอร์ดดังกล่าวด้วยตัวเอง (เวอร์ชัน 2)

ขนาด MinimOSD พร้อม KV Mod V2: กว้าง 21 มม. ยาว: 43 มม. น้ำหนัก: 5.5 ก. (รวมคอนเนคเตอร์)
ไมโคร MinimOSD
ฉันทึ่งกับขนาดไมโครของ OSD นี้ แต่มันมีคุณสมบัติทั้งหมดของเวอร์ชันเต็ม นอกจากความเป็นไปได้ของการจ่ายไฟจาก 12V ซึ่งแทบไม่เคยใช้ในเวอร์ชันเก่าเลย เนื่องจากบอร์ดร้อนเกินไป ดังนั้นจึงสมเหตุสมผลมากที่จะละทิ้งฟังก์ชันนี้และลดขนาดลง

เวอร์ชันไมโครนั้นมีน้ำหนักและขนาดเต็มประมาณ 1/3
ขั้วต่อบัดกรี
การบัดกรีตัวเชื่อมต่อให้เป็น MinimOSD ขนาดเต็มนั้นง่ายและตรงไปตรงมา แต่สำหรับเวอร์ชันไมโคร ฉันไม่ชอบวิธีที่ผู้คนมักจะบัดกรี

ความคิดสร้างสรรค์ของฉันคือการใช้คอนเนคเตอร์ที่ทำมุมแทนคอนเน็กเตอร์แบบตรง ดังนั้นฉันจึงมีพื้นที่เพิ่มเติมเมื่อติดตั้งภายในควอด
ในตอนท้าย เราบรรจุหีบห่อด้วยความร้อนเพื่อป้องกันการบัดกรีและสายไฟ
เชื่อมต่อกับ Naze32, แบตเตอรี่, เครื่องรับ, กล้อง, เครื่องส่งวิดีโอ
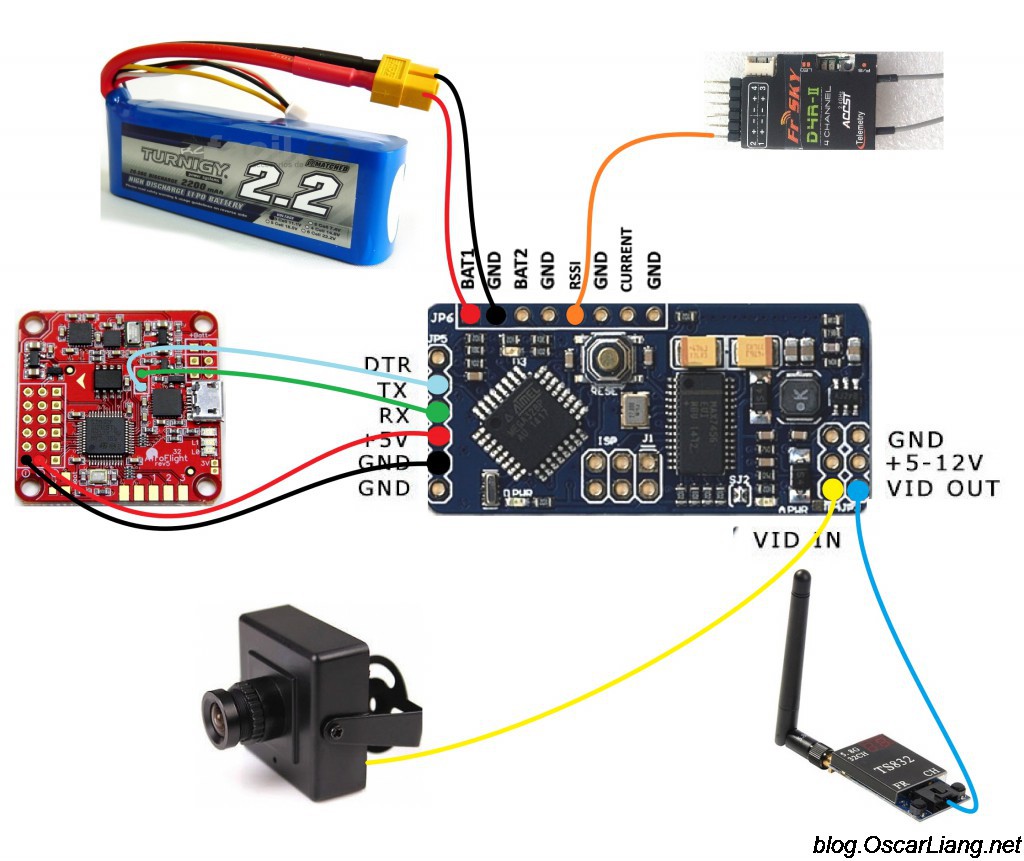
การประกอบคอปเตอร์ของฉันนั้นง่ายมาก ที่นี่ในไดอะแกรมทุกสิ่งที่ต้องเชื่อมต่อ: Naze32, LiPo, เครื่องรับ, กล้อง FPV และเครื่องส่งสัญญาณวิดีโอ

ไดอะแกรมการเชื่อมต่อของ MinimOSD ปกติกับ Naze32, กล้อง, เครื่องรับ, เครื่องส่งวิดีโอ, แบตเตอรี่
วิธีเชื่อมต่อรุ่นไมโคร:

คำถามที่พบบ่อย 1. บางคนบ่นว่าข้อความหายไปเมื่อคันเร่งเพิ่มขึ้น วิธีแก้ไข: เชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ทั้งหมด - กล้อง, OSD, เครื่องส่งวิดีโอเข้ากับกราวด์ทั่วไป
คำถามที่พบบ่อย 2. OSD ไม่แสดง เฉพาะภาพจากกล้องเท่านั้น วิธีแก้ไข: ลองเปลี่ยนมาตรฐาน PAL/NTSC ในการตั้งค่า OSD
พิน VBAT1 เชื่อมต่อกับแบตเตอรี่ลิเธียมหลักเพื่อแสดงแรงดันไฟฟ้า ขา RSSI เชื่อมต่อกับเครื่องรับควบคุมเพื่อแสดงระดับสัญญาณ (หากเครื่องรับเป็น FrSky D4R-II ในโหมด CPPM แล้ว Pin1 จะเป็นสัญญาณ PPM, PIN2 คือเอาต์พุต RSSI)
การเชื่อมต่อกับ Naze32 ผ่านพอร์ตอนุกรม (TX และ RX) จะทำให้ Naze32 ส่งข้อมูลการบินไปยังหน้าจอ (GPS, ทิศทางของเข็มทิศ ฯลฯ) และ OSD จะสามารถเปลี่ยนค่าสัมประสิทธิ์ PID ของตัวควบคุมการบินได้โดยใช้ รีโมทคอนโทรล
ระวัง! การเชื่อมต่อกับคอมพิวเตอร์ใช้พอร์ตอนุกรมเดียวกัน ซึ่งหมายความว่าหากคุณต้องการใช้ Baseflight หรือตัวกำหนดค่า Cleanflight คุณต้องปิดใช้งาน TX และ RX จาก OSD ก่อน
หากไม่มีการเชื่อมต่อพอร์ตอนุกรม MinimOSD จะแสดง RSSI และแรงดันไฟฟ้าด้วยตัวเอง
หากคุณกำลังใช้ Taranis ในโหมด PPM โปรดอ่านบทความนี้: วิธีรับ RSSI ในช่องทางแยกต่างหาก (โดยไม่ต้องต่อสายเพิ่มเติม)
นี่คือสิ่งที่ดูเหมือนภายในมินิควอดของฉัน
การกำหนดค่าด้วย MW-OSD GUI
มีเฟิร์มแวร์ไม่กี่ตัวสำหรับ MinimOSD ที่ฉันชอบคือ Multiwii-OSD (mwosd) เวอร์ชันปัจจุบันคือ 1.3 ตัวกำหนดค่าเป็นโปรแกรมที่มีประโยชน์มาก เมนูบนหน้าจอชัดเจน มีการอัพเดตเฟิร์มแวร์ มีการรองรับ Cleanflight และ Baseflight นอกจากนี้ยังช่วยให้คุณสามารถปรับค่า PID ได้โดยตรงจาก OSD
เชื่อมต่อ MinimOSD กับโปรแกรมเมอร์ FTDI
ทั้งการตั้งค่าและเฟิร์มแวร์ต้องใช้อะแดปเตอร์ FTDI การเชื่อมต่อต้องผ่านสายไฟ 5 เส้น: DTR (GRN), TX, RX, 5V และ GND


การตั้งค่า MinimOSD โดยใช้ MW-OSD GUI
คุณสามารถกำหนดค่าการแสดงข้อมูลเที่ยวบินผ่านอินเทอร์เฟซแบบกราฟิกได้ เพราะ ฉันกำลังบินมินิควอด ทั้งหมดที่ฉันต้องการคือแรงดันแบตเตอรี่ RSSI และตัวจับเวลา ฉันใช้แบตเตอรี่ลิเธียม 4S และตั้งเตือนแบตเตอรี่ต่ำไว้ที่ 13.6V (3.4V ต่อเซลล์ แม้ว่าฉันควรตั้งเกณฑ์ให้สูงขึ้น) สำหรับการกำหนดค่า 3S สามารถตั้งค่าแรงดันไฟฟ้าที่แสดงคำเตือนเป็น 11V ได้ ฉันใช้ FPV ในรูปแบบ PAL

สิ่งเดียวที่ต้องกังวลคือแรงดันแบตเตอรี่ ค่าเริ่มต้นนั้นห่างไกลจากอุดมคติ ดังนั้นคุณต้องลองใช้การตั้งค่าเพื่อให้ได้ค่าที่ถูกต้อง ฉันต้องทำอย่างไร:
ค่าเริ่มต้นสำหรับ " ปรับแรงดันไฟฟ้า" = 200,และแรงดันไฟที่แสดงโดย OSD คือ 21.0V ฉันเอามัลติมิเตอร์มาวัดแรงดันไฟที่แบตเตอรี่ แล้วได้ 11.1V

ทีนี้มาลดค่ากัน ปรับแรงดันไฟฟ้า“สูงสุด 110 ตอนนี้ฉันมี 11.5V บนหน้าจอ OSD เพื่อหลีกเลี่ยงการเปลี่ยนแปลงค่าพารามิเตอร์ไปกลับมาอย่างต่อเนื่อง เราต้องคำนวณค่าที่แน่นอนโดยใช้คณิตศาสตร์และข้อมูลที่เรามีอยู่แล้ว 🙂 เราต้องคำนวณจำนวนโวลต์ที่ให้ 1 ค่าของพารามิเตอร์ "การปรับแรงดันไฟฟ้า"
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
เรารู้ว่าค่าที่ถูกต้องบนหน้าจอควรเป็น 11.1V ดังนั้นค่า " ปรับแรงดันไฟฟ้า"ควรจะเป็น:
110 - (11.5-11.1) / 0.1056 = 106.21 (106 ได้)
ความหมาย " ปรับแรงดันไฟฟ้า” สามารถเปลี่ยนได้ไม่เฉพาะในเครื่องมือกำหนดค่าเท่านั้น แต่ยังเปลี่ยนผ่านเมนูบนหน้าจอด้วย ดังนั้นจึงไม่จำเป็นต้องเชื่อมต่อ MinimOSD กับคอมพิวเตอร์และใช้ตัวกำหนดค่า
Arduino เป็นโปรแกรมเมอร์สำหรับ MinimOSD?
ฉันลองใช้ Arduino UNO เป็นโปรแกรมเมอร์ FTDI เหมือนที่เคยทำกับอุปกรณ์อื่นมาก่อน ฉันจัดการเพื่อเปลี่ยนพารามิเตอร์ OSD ผ่านโปรแกรม MW-OSD GUI อย่างไรก็ตาม ฉันพบปัญหาเมื่อทำการแฟลช MinimOSD ข้อความแสดงข้อผิดพลาดคือ:
avrdude: stk500_getsync(): ไม่ซิงค์: resp=0x00.
ดูเหมือนปัญหาการซิงค์ข้อมูลบางอย่าง แต่ฉันแน่ใจว่าฉันเชื่อมต่อ DTR กับ RESET บนบอร์ด Arduino อย่างถูกต้อง ฉันไม่รู้ว่าต้องทำอะไรอีก ดังนั้นฉันจึงใช้โปรแกรมเมอร์ FTDI เพื่อแฟลช MinimOSD
เมนู OSD: ตั้งค่า PID, อัตรา, แรงดันไฟ, RSSI
เมนู OSD เป็นคุณสมบัติที่ฉันโปรดปราน และนั่นเป็นสาเหตุที่ทำให้ฉันเลิกใช้ SuperSimple OSD มีการตั้งค่ามากมายที่คุณสามารถเปลี่ยนได้โดยไม่ต้องเชื่อมต่อกับคอมพิวเตอร์ ตัวอย่างเช่น ฉันสามารถเปลี่ยนค่าของสัมประสิทธิ์ PID ในสนามได้โดยตรงโดยใช้รีโมทคอนโทรล โดยไม่ต้องใช้บลูทูธและคอมพิวเตอร์! อย่างไรก็ตาม คุณไม่สามารถเปลี่ยนพารามิเตอร์อัตราการหมุนและอัตราการขว้างแยกกันใน Cleanflight (ภาษาอังกฤษ) ได้ในขณะนี้ที่เชื่อมโยงกัน (คุณสามารถเปลี่ยนได้ทั้งสองอย่างพร้อมกันเท่านั้น ประมาณการแปล) ในเวอร์ชันใหม่ พารามิเตอร์เหล่านี้จะเป็นอิสระจากกัน
ในการไปที่เมนู MW-OSD คุณต้องปลดอาวุธคอปเตอร์ก่อน จากนั้น:
- แก๊สอยู่ตรงกลาง
- yaw (yaw) - ถูกต้อง
- pitch (pitch) - ไปข้างหน้า
ในการนำทางผ่านเมนู:
- Roll / pitch (pitch / roll) - เพื่อเลื่อนผ่านเมนู
- Yaw (yaw) - เพื่อเปลี่ยนค่า
- PID Config (ม้วน/Pitch/Yaw PID สำหรับโหมดการบินต่างๆ)
- การปรับ RC (อัตรา RC, RC Expo, อัตรา Pitch / Roll, อัตราการหันเห, TPA (Throttle PID Att)
- แรงดันไฟ (แสดงหรือไม่แสดงแรงดัน, "ปรับแรงดัน", "สัญญาณเตือนแรงดัน", "เซลล์")
- RSSI (แสดงหรือไม่)
- ปัจจุบัน (แสดงกระแสที่ใช้หรือไม่การตั้งค่า)
- ขั้นสูง (หน่วย: เมตร/นิ้ว, สัญญาณ: Pal หรือ NTSC, เข็มทิศ)
- จอแสดงผล (สวิตช์ เค้น พิกัด GPS เซ็นเซอร์ gimbal ฯลฯ)
- สถิติ (ระยะทาง ความสูงสูงสุด ความเร็วสูงสุด เวลาบิน)
แวบวับ
ผู้จำหน่าย MinimOSD บางรายจะแฟลชเวอร์ชันล่าสุดด้วยตนเอง ดังนั้นคุณจึงไม่ต้องกังวลกับการแฟลช แต่บางทีในภายหลัง คุณจะต้องการอัปเดตเฟิร์มแวร์หรือลองตัวอื่น เพื่อตรวจสอบเวอร์ชันของเฟิร์มแวร์ เปิด OSD บนรูปสี่เหลี่ยม และดูคำจารึกบนหน้าจอบูต
เฟิร์มแวร์แต่ละตัวในคำแนะนำจะอธิบายวิธีการแฟลชโดยละเอียด นี่คือบทสรุป:
- ดาวน์โหลดไฟล์เฟิร์มแวร์
- ดาวน์โหลด Arduino IDE
- เปิดไฟล์เฟิร์มแวร์ใน Arduino IDE
- เปลี่ยนการตั้งค่าหากจำเป็น
- ฉันไม่ได้เปลี่ยนแปลงอะไรมาก เฉพาะประเภทบอร์ด (WitespyV1.1) และเฟิร์มแวร์ตัวควบคุมการบิน (Cleanflight)
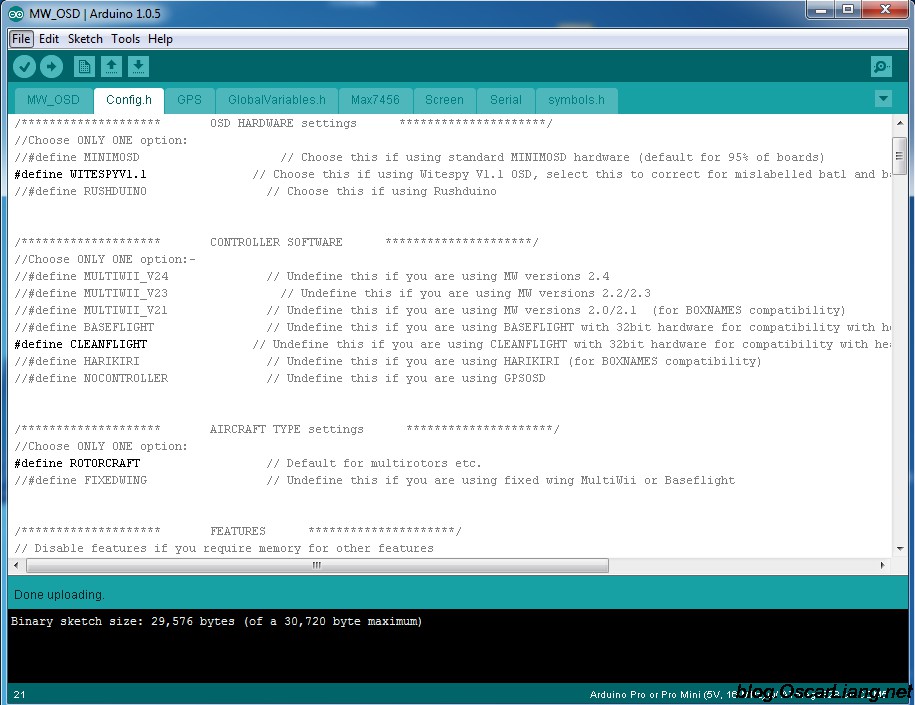
- เชื่อมต่ออะแดปเตอร์ FTDI (โปรแกรมเมอร์) กับ MinimOSD / Micro MinimOSD
- คลิกรวบรวมและอัปโหลด
 OSD สำหรับ ArduPilot Mega - ระบบสำหรับซ้อนข้อมูล telemetry บนวิดีโอเที่ยวบิน
OSD สำหรับ ArduPilot Mega - ระบบสำหรับซ้อนข้อมูล telemetry บนวิดีโอเที่ยวบิน ทำไมพีซีที่ใช้ Windows ของฉันไม่เชื่อมต่อกับโทรศัพท์ของฉันในโหมดฮอตสปอต Wi-Fi
ทำไมพีซีที่ใช้ Windows ของฉันไม่เชื่อมต่อกับโทรศัพท์ของฉันในโหมดฮอตสปอต Wi-Fi การแก้ปัญหาด้วยการปรับความสว่างบนแล็ปท็อป
การแก้ปัญหาด้วยการปรับความสว่างบนแล็ปท็อป