Povezivanje mini osd-a na apm pro. OSD za ArduPilot Mega je sustav za preklapanje telemetrijskih podataka na video zapisu leta. MinimOSD pune veličine
Betaflight OSD (Informacije na ekranu) je integracija informacija s različitih senzora u video stream putem kontrolera leta. Obično je OSD dodatna ugrađena ploča ili već integrirani čip u kontroleru leta. OSD prenosi informacije kao što su napon baterije, horizont, nadmorska visina i još mnogo toga na zaslon kacige ili naočala.
Također možete koristiti OSD izbornik za promjenu PID-a, filtara i drugih postavki kvadrokoptera. U ovom članku objasnit ću što je Betaflight OSD, što radi i kako ga postaviti.
Betaflight OSD u odnosu na MinimOSD (MWOSD)
Betaflight OSD je jednostavniji i bolji od MinimOSD-a:
- Prvi je čip koji je već integriran u kontroler leta, ne trebate ništa lemiti niti spajati, dok je MinimOSD zasebna ploča na koju trebate zalemiti sve komponente kvadrokoptera kao što su PC, kamera, video odašiljač i tako dalje, ovisno o tome koje ćete senzore više koristiti. Osim toga, potreban vam je programer za flash ovaj modul putem računala.
- Prednosti Betaflight OSD-a: Jednostavno postavljanje jer je sve već integrirano. Konfiguracija se odvija u Betaflight GUI. Ne trebate ništa lemiti, flashati, ne trebate programator i firmware modula treće strane.
- Betaflight OSD ne zauzima UART port jer je obično spojen na SPI BUS.
Iako je sada MinimOSD već dosta dobro razvijen i također ima grafičku ljusku i slične karakteristike.
Koji kontroleri leta podržavaju Betaflight OSD
Ne podržavaju svi kontroleri leta s integriranim OSD-om Betaflight OSD, neki zahtijevaju dodatni softver za postavljanje OSD-a.
Trenutno Betaflight OSD podržavaju sljedeći zrakoplovi: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 i Betaflight F3.
Konfiguriranje Betaflight OSD-a
Prvo provjerite imate li najnoviji firmware kontrolera leta jer je OSD podržan na Betaflight firmware V3.1 i novijim.
Ako vaš zrakoplov već ima integrirani OSD čip, jednostavno spojite kameru i video odašiljač na odgovarajuće priključke.
Ispod je primjer kako spojiti kameru i odašiljač na DYS F4 Pro FC kontroler leta, kamera se povezuje na "Vin", a odašiljač na "Vout":
Sada se povežite s Betaflight Configuratorom, idite na karticu Konfiguracija i uključiti OSD:
Nakon toga idite na OSD karticu za početak postavljanja:
Što može biti jednostavnije od ovog sučelja? Samo uključite i isključite podatke koje želite prikazati.
Video Format - Odaberite PAL ili NTSC, ovisno o načinu u kojem se nalazi vaša FPV kamera. Ako ne znate u kojem je načinu rada kamera, postavite ga na AUTO, program će odabrati pravi format za rad kamere.
Važna informacija: Ako je zaslon za pregled u PAL ili AUTO modu, a vaša kamera u NTSC, podaci prikazani na dnu zaslona bit će odrezani, to je značajka ovog formata, ima kraći okvir. Kada koristite AUTO format, najbolje je podatke koje trebate smjestiti na sredinu ekrana.
U bloku "Alarm" možete postaviti RSSI vrijednosti, kapacitet baterije, vrijeme prije leta (štoperica) i nadmorsku visinu. Čim se podaci počnu podudarati s tim brojevima, počet će bljeskati na zaslonu kacige ili naočala.
U prozoru za pregled možete povući prikazane podatke kako želite, ali ih nemojte stavljati preblizu rubovima jer se tada mogu odrezati.
- Prikaz napona baterije
- Vrijeme leta (štoperica)
- Ime (vlastito)
- Vrijednosti plina
- Koliko struje troši dron
- Koliko je mAh kapaciteta baterije izgubljeno
Za aktiviranje OSD izbornika u naočalama ili kacigi potrebna vam je kombinacija pokreta štapića na daljinskom upravljaču:
- plin u sredini
- skretanje (zakretanje, kotrljanje osovine) lijevo
- pitch (pitch, tilt) naprijed
Gas mora biti u sredini cijelog tuninga!
Za kretanje kroz izbornik koristite desni štap na daljinskom. Za pomicanje - držite gore ili dolje, za odabir stavke izbornika - držite lijevo/desno.
Ovdje možete promijeniti PID-ove, filtere, profile i tako dalje. Većina ovih postavki je sama po sebi razumljiva ako ste već konfigurirali Betaflight putem GUI kartice OSD. Ali ipak, nisu sve stavke ovdje, neke su dostupne samo u samom konfiguratoru. Nakon što izvršite postavke, idite na glavni izbornik i kliknite " Spremi * Ponovo pokreni«.
Kako promijeniti font u Betaflight OSD-u
Ako vam se ne sviđa font koji je prikazan na ekranu, možete ga jednostavno promijeniti u Betaflight Configuratoru, da biste to učinili, idite na OSD karticu i na dnu će se nalaziti gumb Upravitelj fontovima:
Nakon što odaberete novi font, prozor za pregled i dalje će prikazivati zadani font, ali ćete imati onaj koji ste odabrali sa svojim naočalama i kacigom, stoga ne brinite.
Često postavljana pitanja
Zašto ne mogu vidjeti podatke s OSD-a u slušalicama?
Provjerite jeste li naveli ispravan video format, PAL ili NTSC, pokušajte zamijeniti. Ako i dalje ne radi, provjerite kvalitetu ožičenja i lemljenja od kamere i odašiljača do OSD modula.
Kako promijeniti ime?
U Betaflightu, konfiguracijski tab, pomaknite se prema dolje, pojavit će se tekstualno polje "Craft name", tamo možete unijeti drugo ime.
Poseban uređaj, Minim OSD, razvijen je za korisnike APM kontrolera za preklapanje telemetrijskih podataka. Kratica OSD dolazi od engleskog On Screen Display, što znači prikaz dodatnih informacija na ekranu operatera.
Kineski proizvođači proizvode oba kontrolera leta - HKPliot Mega, ArduFlyer i OSD kontrolere - MAVLink-OSD.

Izvana, Minim OSD se ne razlikuje puno od MAVLink-OSD-a, on je poput zrcalne kopije ploče, gdje je glavni čip zakrenut za 45 stupnjeva. Također, MAVLink-OSD nema kratkospojnike za odabir vrste video signala i kombiniranje snage digitalnog i analognog dijela.
Minim OSD v1.0 imao je problema s pregrijavanjem pri korištenju napajanja kamere od 12 volti, ovaj problem je riješen u v1.1.
Zbog činjenice da je HK krajem 2013. imao problema s isporukom, naručio sam MAVLink-OSD od RCTimera.

Za programiranje će vam svakako trebati FTDI adapter. Stoga sam uz MAVLink-OSD odmah uzeo adapter FTDI Tool V1.0 http://www.rctimer.com/product_684.html .

Za konfiguriranje i flash uređaj trebat će vam poseban softver pod nazivom ArduCam-OSD. Preuzmite najnoviji ArduCam-OSD softver i firmver ovdje http://code.google.com/p/arducam-osd/downloads/list. Trenutačno je trenutna verzija 2.0.
Također možete instalirati alternativni firmware, projekt se zove minimosd-extra. Informacije se nalaze ovdje https://code.google.com/p/minimosd-extra/. Za firmware će vam trebati vlastiti uslužni program - MinimOSD-Extra Config Tool. U pravilu, arhiva sadrži uslužni program i firmware. Možete ga preuzeti ovdje https://code.google.com/p/minimosd-extra/downloads/list. Oči bježe od broja verzija.
Zamotao sam ploču i adapter u termoskupljajuću foliju.
Konektor kontrolera za spajanje je vrlo nezgodan, šestopinski, bez “sigurne” zaštite. Svi pinovi se koriste za programiranje, ali samo 4 pina se koriste za spajanje na kontroler leta.
Za programiranje ostaje pronaći mini-USB kabel.

Što se tiče četveropinskog konektora, ovdje je sve složenije. Ako se pomiješa i spoji pogrešno, može izaći dim.
Povezuje OSD s kontrolerom leta u priključku za telemetriju. Žica za OSD mora biti spojena na središnje pinove: GND, VCC, RX, TX.
Ako koristimo radio modem, onda ga povezujemo paralelno. Zato sam morao zalemiti Y-kabel.

Na fotografiji je prikazana žica za AIOP kontroler, u kojoj je GPS također spojen na jedan konektor.
Nisam maknuo žicu koja ide na TX mog OSD-a, da bi bila univerzalna, nikad ne znaš gdje ću još koristiti ovu žicu.
Treba napomenuti da ako ne primijenite 5 volti na analogni dio ploče, ploča će biti tiha.

Neki resursi nude preinaku ploče i napajanje analognog dijela s digitalnog, ali ja to nisam učinio, jer postoji mišljenje da se mogu pojaviti smetnje.
Za one koji se odluče spojiti iz jednog izvora napajanja, krug će biti kao što je prikazano na fotografiji.

Trenutno imam analogni dio koji pokreće video odašiljač, o čemu sam već govorio u svom prethodnom članku.
ArduCAM OSD konfiguracija
Počnimo s izvornim uslužnim programom ArduCAM OSD Config. Trenutačno je aktualna verzija 2.1.2.0.
Od glavnih elemenata treba istaknuti programski izbornik, kao i tri kartice koje se prebacuju između sljedećih ekrana: Config, Panel 1, Panel 2.
Konfiguracija, ovdje je sve vrlo jasno.
Prije svega, odaberite broj porta i kliknite gumb Read From OSD.

Treba napomenuti da se tip video signala NTSC - PAL mijenja kroz izbornik programa Video Mode. Stavka izbornika Datoteka omogućuje vam spremanje i učitavanje postavki ili odlazak na zadane postavke. U izborniku Opcije možete omogućiti način rada mreže za Panel1 i 2, ažurirati firmware, odabrati pozadinsku sliku, koristiti zapisnik za postavke, dodati vlastite fontove.

Panel 1 koristi se za prilagodbu informacija prikazanih preko videa za prvi zaslon. Prebacivanje kanala je postavljeno na slobodni radio kontrolni kanal OSD Toggle Channel.

U skladu s tim, za drugi ekran postavili smo Panel 2.

Firmware se ažurira pomoću istog uslužnog programa.

MinimOSD-Extra Config Tool
Kada otvorimo program MinimOSD-Extra Config Tool, čini se da smo pomiješali mape i ponovno pokrenuli ArduCAM OSD Config. Ovo je prvi dojam, zapravo je vrlo sličan, ali ima više postavki.
Pogledajmo glavne razlike.
Prva stavka je izbor tipa modela: Avion, Copter.
Dodana je opcija za automatsko prebacivanje zaslona na onaj koji je naveden u padajućem izborniku (Automatsko prebacivanje panela upozorenja) kada se pojavi upozorenje. To je potrebno kada se, na primjer, sve informacije uklone na drugom ekranu tako da ništa ne ometa prikaz.
Možete odabrati prikaz baterije u postocima ili mA.
I još jedan Show sign before value block, koji je odgovoran za prikaz ikona prije vrijednosti.

Prvi ekran

Drugi ekran

rezultate
Prvo sam instalirao firmware putem ArduCAM OSD Config.

U principu je sve bilo normalno, ali je jedna nijansa bila uznemirujuća, što je izraženo u sljedećem.
Nakon spajanja uređaja primijetio sam na ekranu da su neke informacije s lijeve strane odsječene. Ikone ispred vrijednosti parametara nedostaju napola. Odlučio sam pokušati promijeniti vrstu signala u PAL, kao rezultat je postalo još gore, odrezao je gornji i donji dio ekrana, pa sam ga vratio na NTSC. Neka bude samo s jedne strane, a ne s tri, pogotovo jer ovaj nedostatak možete pokušati ispraviti s lijeve strane.

Pomaknute informacije blokiraju jedan znak udesno.

Operacija je bila bezbolna, za to je bilo dovoljno mjesta.


Kao rezultat toga, sve je uspjelo, ikone su sada potpuno vidljive, informacije su savršeno čitljive na ekranu.
Ali instaliran je MinimOSD-Extra firmware 2.4 R726, ali je na ekranu počeo odavati neku vrstu sramote.

Slika je postala nečitljiva, informacije su bile zbrkane na cijelom ekranu.

Preuzeta ranija verzija 2.2.

S ovom verzijom firmvera informacije su se počele prikazivati bez izobličenja.

zaključke
Kompaktan i jeftin uređaj. Prilično univerzalan, koristi se kako s originalnim ArduPilot Mega (APM) pločama, tako i s njegovim klonovima HKPILOT Mega, ArduFlyer, kao i s kontrolerima serije AIO (All-In-One) s MPNG ili MultyWii firmwareom. Na forumima postoje informacije o povezivanju s DJI Naza kontrolerima, ali to zahtijeva rad s lemilom u rukama.
Jedini minus je šestopinski konektor na ploči u koji spajamo kabel s četveropinskim konektorom. Može biti mnogo varijacija, ako pogriješite, možete spaliti ploču, jer nema zaštite.
Također morate zapamtiti napajanje digitalnih i analognih dijelova ploče, inače neće raditi. Koju metodu prehrane odabrati, ovdje će nekome biti prikladnije.
Naravno, više mi se svidio MinimOSD-Extra, jer vam omogućuje izvođenje dodatnih postavki koje nisu u ArduCam OSD Config. No, kako se pokazalo, još uvijek moramo pronaći stabilnu verziju. Naišao sam na činjenicu da je kod nekih firmware-a pokvaren izlaz informacija preko videa. Uspio sam pronaći radnu verziju ne prvi put. Stoga mi neke opcije MinimOSD-Extra nisu bile dostupne. Nažalost, to je minus mnogih projekata otvorenog koda.
Stoga je vrijedno napomenuti da je ArduCam-OSD Config stabilniji i dokazaniji.
Kontroler vrši kvalitetno preklapanje informacija na video, tekst izgleda prilično jasan i lako čitljiv na malom ekranu. Nisam primijetio nikakva usporavanja u prikazu informacija.
OSD je koristan dodatak za letenje kamerom. U ovom članku ćemo pogledati što je OSD, kako se povezuje s našom FPV opremom i, na kraju, pregled mogućnosti različitih OSD-ova.
Ako imate bilo kakvih pitanja - javite mi u komentarima.
Što je OSD i koje su njegove prednosti
OSD je skraćenica od On Screen Display - tj. prikaz na zaslonu ili izbornik na zaslonu (tj. na vrhu glavne slike, obično s fotoaparata, prikazuju se neke dodatne informacije, uglavnom tekst). U našem hobiju, OSD je mala tiskana ploča koja prikazuje podatke o letu na vrhu slike vašeg fotoaparata. To vam omogućuje praćenje stanja kvadrokoptera izravno tijekom leta na kameri.
Ako imate prave senzore i OSD, moći ćete vidjeti podatke o letu izravno u svojim naočalama ili monitoru, kao što su napon baterije, kolika je struja koju troše vaši motori i druga elektronika, vaša nadmorska visina, GPS koordinate itd.
To čini letenje oko kamere sigurnijim, jer možete vidjeti razinu baterije, znati kada sletjeti, koliko ste već preletjeli i u kojem smjeru se trebate vratiti.
OSD nije potreban za letenje kamere, ali kao što vidite izuzetno je koristan. Većina ljudi kupuje barem SimpleOSD kako bi vidjeli napon na bateriji, to je neophodno kako bi se izbjeglo prekomjerno pražnjenje (ako letite daleko, onda se ne čuje sirena koja signalizira praznu bateriju).
Vrste podataka koje se mogu prikazati pomoću OSD-a
Slika prikazuje najčešće korišteni skup podataka prilikom letenja oko kamere.

Tajmer
Ovisno o vrsti vašeg OSD-a, to može biti vrijeme leta (počevši od trenutka kada polijete) ili vrijeme rada (počevši od trenutka kada je kvadrokopter uključen). Neki OSD-i omogućuju prikaz više vrsta mjerača vremena.
Napon baterije
Gotovo svi OSD-i omogućuju prikaz napona. Ovo je najvažnija informacija kada letite oko kamere, tako da znate kada sletjeti (obično sletim kada napon padne na 3,5V po ćeliji)
Trenutna potrošnja
Ako imate senzor struje, tada možete pratiti koliku struju crpe motori i koliko je mAh vaše baterije već potrošeno.
RSSI
RSSI je pokazatelj jačine signala vašeg odašiljača, obično se prikazuje u postocima. Što dalje letite, signal će biti slabiji, ove informacije će vam pomoći da znate u kojem trenutku biste se trebali vratiti.
RSSI je izlaz iz vašeg kontrolnog prijemnika, obično u PWM formatu, pa će vam možda trebati D/A pretvarač i niskopropusni filtar.
Upozorenja
Neki OSD-i mogu prikazati različite alarme, upozorenja, za koje vi, kao korisnik, morate postaviti granične vrijednosti za parametre, kao što su napon baterije, RSSI vrijednost itd.
Zrakoplovni način
Prikazuje trenutni način letenja vašeg zrakoplova. Ove informacije će vam biti korisne ako često prelazite između različitih načina rada kao što su Loiter (lebdenje u mjestu), ručni način rada, samonivelirajući način rada, tako da se ne morate pitati u kojem se modusu zrakoplov trenutno nalazi. Da biste to učinili, morat ćete povezati kontroler leta na OSD.
GPS
Korištenjem GPS-a dobivate ne samo koordinate drona, već i njegovu visinu (iako će to biti točnije od barometra ili sonara). Zahvaljujući pametnim izračunima možemo vidjeti brzinu preko tla, udaljenost do početne točke i njene koordinate (grafički prikaz smjera prema početnoj točki je vrlo korisna stvar, pogotovo ako se malo izgubite).
Horizont
Virtualni horizont pomoći će vam razumjeti kako je dron nagnut u svemiru.
OSD veza u kameri, video odašiljaču i kontroleru leta
Podijelio bih sve OSD u 3 vrste:
- Samostalni OSD-ovi
- OSD ovisi o kontroloru leta
- hibrid
Samostalni OSD-ovi povezuju se samo na kameru i video odašiljač i ne komuniciraju s kontrolorom leta. Ponekad se mogu spojiti izravno na GPS ili druge senzore kako bi imali pristup svojim očitanjima. Dobar primjer ove vrste je Skylark OSD (+GPS i senzor struje) i Super Simple OSD.
OSD-ovi ovisni o kontroleru oslanjaju se samo na podatke iz kontrolera leta, obično preko serijskog porta (RX/TX). Sam OSD ne radi ništa osim što prikazuje ove podatke. MinimOSD iz Hobbykinga dobar je primjer ove vrste OSD-a (ako je verzija nepromijenjena, kao KV mod). Prednost ove vrste je u tome što OSD koristi podatke primljene od senzora kontrolera, što znači da sam kontroler koristi te podatke kako bi pojednostavio upravljanje i kontrolu. Dok u slučaju samostalnih OSD-ova, kontroler leta ne može koristiti podatke sa senzora spojenih na OSD.
OSD hibridnog tipa može se koristiti kao samostalni OSD (s ograničenom funkcionalnošću), a također se može spojiti na kontroler kako bi se povećao skup prikazanih podataka o letu. MinimOSD s KV modom izvrstan je primjer ove vrste OSD-a: ako se koristi kao samostalan, možete vidjeti samo RSSI i napon, ali kada ste spojeni na kontroler s GPS-om, tada ćete vidjeti trenutni način leta, GPS koordinate, nadmorsku visinu , itd.
Najlakše povezivanje - Samostalni OSD
Kao primjer, povežite Hobbyking Super Simple OSD na FPV kameru, video odašiljač i 3S litijsku bateriju.

Teoretski, možete pratiti napon na drugoj bateriji pomoću Bat2 porta.
Povezivanje hibridnih OSD-ova
Napominjem da u ovom slučaju OSD samostalno mjeri napon baterije i RSSI razinu (iako ih je moguće spojiti na kontroler i prenijeti podatke preko njegovog serijskog porta, obje opcije rade dobro).
Ako trebate prikazati koordinate, smjer do početne točke i udaljenost do nje, tada morate spojiti GPS na Naze32.
OSD koji sam već koristio
MinimOSD s KV Team Mod
MinimOSD je trenutno moj omiljeni OSD i koristim ga. Preuzimanjem odgovarajućeg firmwarea, MinimOSD se može koristiti s Naze32, CC3D, Multiwii, APM i PixHawk pločama. Ovo je vrlo dobra ploča koja može prikazati apsolutno sve informacije o letu koje su dostupne od senzora.

MinimOSD može prikazati sve informacije dostupne od senzora
Hobbyking i Banggood prodaju MinimOSD, ali imaju originalnu verziju koja nema dodatne pinove sa strane za RSSI, napon baterije itd. Ne bih ih kontaktirao ako je moguće kupiti MinimOSD KV Mod.
MinimOSD Micro

Točno isti OSD kao što je gore opisano, razlika je u manjoj veličini. Osim toga, na njemu nema 12V -> 5V pretvarača, ali to nije bitno, jer. ionako nitko ne koristi ovaj pretvarač zbog pregrijavanja ploče.
MozakFPV
Ova ploča također pokazuje bilo što, s odgovarajućim senzorima.

U članku ćemo razmotriti povezivanje, bljeskanje i konfiguriranje MinimOSD-a. A odgovorit ćemo i na pitanje što učiniti – ako je nešto pošlo po zlu, i što učiniti – da sve ne završi tužno.
« Petka - uređaji!?!? -Tristo!!! -Koliko je trista??? - Što je s instrumentima?
MinimOSD. Jeftin i vrlo koristan šal. Omogućuje vam da vidite što se sada događa s helikopterom - trenutni napon, koliko je ampera potrošeno, koliko je globalnih satelita za pozicioniranje zarobljeno, a također vam neće dopustiti da se "izgubite" na nebu. Nemoguće je izgubiti se na nebu, kažete? A ovdje je vrlo moguće. Počevši od elementarnog "poletio je, oh, ali sve je drugačije odozgo ... oh, gdje sam ja?", završavajući teškim uvjetima leta, na primjer, letjeti u mraku ili po oborina, ili slučajno uletio u oblak, kao u videu ispod:
U četvrtoj minuti samo je spasonosna strelica “doma” pokazivala kamo treba letjeti.
Dobro, dobro, dosta tekstova, idemo vježbati!
PRIPREMA.
Dakle, naručili ste MinimOSD za sebe. Na Banggoodu ili Hobbykingu ili RCTimeru - bez obzira gdje, i dobio nešto poput ovoga:
Ruke me svrbe da ga spojim na radnu stanicu i vidim što pokazuje. Ali ne morate učiniti sve odjednom! Prepun je naručivanja novog OSD-a - a to je izgubljeno vrijeme (što je glavna stvar) i naravno izgubljeni novac.
Na ploči se nalaze dva velika čipa: ATMEGA328P i MAX7456. Prvi mikro krug (točnije mikrokontroler) odgovoran je za komunikaciju s kontrolerom leta ("digitalni dio" ploče). A drugi je jednokanalni monokromatski OSD (OnScreenDisplay - izbornik na ekranu) od Maxima, nazovimo ga "analogni dio" ploče. Dakle, ovaj MAX7456 je prilično hirovit mikro krug. Ne voli pregrijavanje, ne voli oštre skokove između "digitalnog" uzemljenja i "analognog" - ukratko, lako gori. I srećom, lijeni Kinezi NIKAD ne leme obični hladnjak mikrosklopa (na "trbuhu"). Ako koristite rupčić u obliku u kojem je došao - MAX će izgorjeti - 80% garancije. Kako se to ne bi dogodilo, lemimo tri rupe označene na fotografiji ispod.

Da biste to učinili, umetnite tanki lem (promjera 1 mm, poželjno je da bude odmah s fluksom) u rupu i zagrijte ga lemilom:

I evo rezultata (lemljenje nije baš dobro, ali najbolje što mogu - bolje ćete!)

Sada o značajkama veze. Pažljivi ljudi primijetili su da sam zalemio džemper odozgo. Postoji nekoliko načina za povezivanje MinimOSD-a, a mnoge kopije su pokvarene što je bolje ili ispravnije ili daje manje smetnji. Koristim način povezivanja s kombinacijom digitalnog i analognog uzemljenja te napajanjem od 5 volti iz "digitalnog" dijela. Budući da minimOSD troši dosta, bolje je napajati ploču iz zasebnog izvora napajanja. Skoro izgleda ovako:

Odnosno, na vrhu sam zalemio skakač, čime sam ujedinio zemlje. I još trebate ispustiti jedan skakač, na "prednju" stranu ploče.

POVEZIVANJE I POSTAVKA
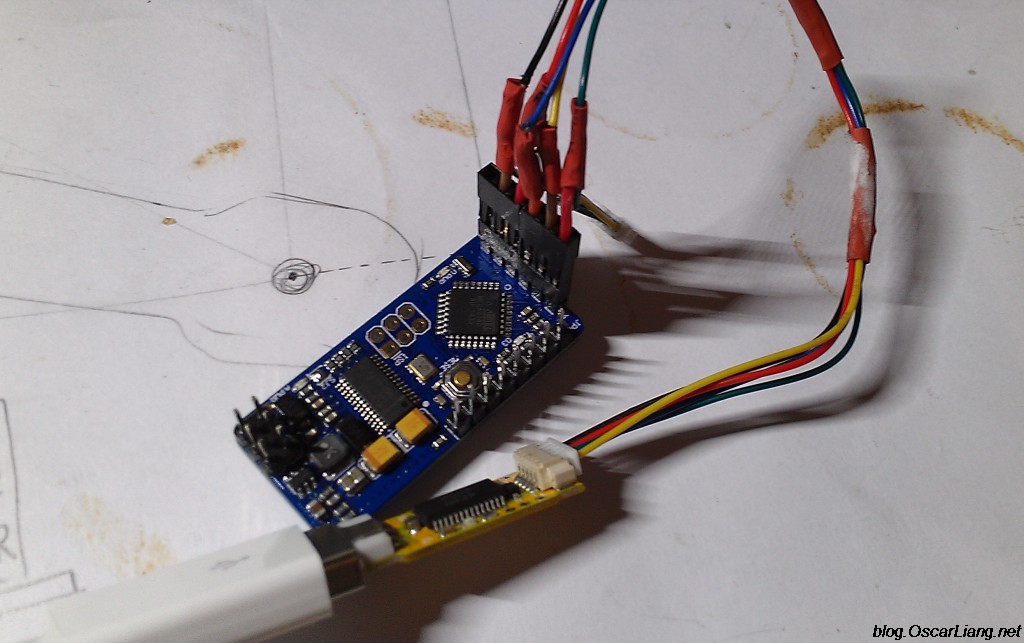
Pa, sve je zalemljeno, sada je naš šal spreman za spajanje na računalo. Za to nam je potreban FTDI adapter (na primjer, uključen ili bilo koji drugi USB-UART TTL adapter).

Povezujemo pomoću 5 žica, dijagram povezivanja je sljedeći: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (na OSD strani) - povezujemo ih na FTDI adapter 1. DTR , 2. Rxi, 3 .Txo, 4.VCC, 5.GND. Evo slike kako je to kod mene povezano:

Ako nije jasno, pogledajte ovaj video, posebno pažljivo u 1:03
Sada, što preuzeti i kako konfigurirati. Za početak, reći ću da je za helikoptere i za zrakoplove firmware drugačiji. Tu je i firmware za Multivia (kvTeam), a tu su i zasebni modovi - od samostalnog rada (bez kontrolera leta), do povezivanja čak i na Nazu.
Ali ovdje razmatramo "klasični" slučaj - helikopter na AWP kontroleru. službena stranica projekta. stranica za preuzimanje (za helikopter pod AWP, morate učitati ExtraCopter). Ali ovo su stare verzije, ljudi su od tada dosta modificirali. Moderni firmware su u . U vrijeme pisanja ovog teksta, ovo je R800 firmware, on leži (korisnik MinimOSD_Extra, lozinka Top_Secret), na Ya.Disk.
Arhiva sadrži sam firmware (HEX - datoteka), datoteku s fontovima (mcm - datoteka) i sam program (OSD_Config.exe).
Prvo, idemo na upravitelj uređaja i provjerimo brzinu FTDI porta (postavit ćemo 115200):

Pokrećemo program OSD_Config.exe, odabiremo port, pritisnemo gumb "Čitaj s OSD-a", trebala bi biti poruka o uspješnom čitanju. Budući da se ne zna koji je firmware učitan iz tvornice, kako ne bismo imali problema u budućnosti, napunit ćemo ga svježim. Da biste to učinili, kliknite na izbornik Optios> Update Firmware

odaberite datoteku i prenesite je.
Primit ćemo poruku o uspješnom firmveru

Tada će se kontroler inicijalizirati i učitati postavke u program, o čemu će se izvijestiti

Vrijeme je za preuzimanje datoteke fonta koja odgovara firmware-u (ako se to ne učini, izgled OSD-a može se pokazati vrlo smiješnim ili čak nečitljivim). Pritisnite izbornik Option>Update Charset,

odaberite MCM datoteku i prenesite je

Čekamo spremnost

Nakon ulijevanja, regulator se ponovno inicijalizira.



Da malo objasnim:
RSSI kanal - pretvaranje RSSI u postotke. Gdje je 5 volti 255 (maksimalno u oktalnom obliku). A FRsky prijemnik ima maksimalni signal od 3,3 volta. Ako označite potvrdni okvir RSSI omogući RAW, tada ćemo na FPV ekranu vidjeti "sirove" podatke. Upravo njih možemo utjerati u postavke. Ili možete jednostavno upisati moje vrijednosti.
Još jedna suptilnost - mijenjanje OSD zaslona. Kao što vidite, postoje dvije ploče za podatke. Možemo se prebaciti na tri opcije prikaza - screen1 (Panel1), screen2 (Panel2), prazan zaslon bez podataka (Disabled). Da bismo to učinili, prvo moramo odlučiti kako ćemo se točno prebacivati između ekrana. Na primjer, ako se prebacujemo između zaslona pomoću okretnog ili tropoložajnog prekidača, tada ćemo imati tri raspona vrijednosti po kanalima (Panel1: 0-1233, Panel2: 1233-1467, Onemogućeno: 1467- 1701). U tom slučaju, prekidač Rotation Switching mora biti isključen. A ako se prebacujemo jednostavnim prekidačem s dva položaja, onda ima smisla omogućiti Rotation Switching. U isto vrijeme, kada je prekidač uključen, mijenjat ćemo zaslone naizmjence (Panel1 -> Panel2 -> Disabled -> Panel1 ......), ako je prekidač isključen, prebacivanje između ekrana će Stop. Koji će kanal mijenjati zaslone određuje se na padajućem popisu pod nazivom OSD Prebacivanje kanala. Stavio sam ga na kanal broj 6. I postoji još jedna zasjeda koju neki (uključujući i mene) u početku zbunjuju - Upozorenje Auto Panel Switch. Ovaj popis definira na koji se zaslon treba prebaciti kada se pojavi bilo koje od prethodno definiranih upozorenja. Čini se da je sve jasno. Vi sami letite, nešto se dogodilo u letu, OSD se prebacio na ekran koji ste pitali. Ali ovdje je pitanje - postavljamo prebacivanje između zaslona, u pravilu je to konfigurirano kod kuće, helikopter ne leti, želimo provjeriti - zasloni se ne prebacuju! Ali budući da kod kuće obično nema GPS Fixa - ukratko, upozorenje je proradilo! Dakle, prebacivanje između ekrana "ne radi" ... 🙂
Ne znam trebaju li ostali parametri pojasniti, možda ću kasnije dopuniti članak.
Mogu samo reći da pri postavljanju glavnog ekrana ne biste trebali sve odjednom ugurati tamo. Bolje je prvo isključiti sve (u stupcu lijevo), pa tek onda uključiti samo ono što vam je potrebno i odmah smjestiti u desni dio ekrana. Preporučam da ostavite prazan prostor na rubovima ekrana, može se odrezati monitorom ili DVR-om olovkom ili naočalama.
Dalje, još jedna važna točka - Postavljanje OSD-a u Planeru misije. Pretpostavimo da ste sve povezali kako treba, ali umjesto smiješnih brojeva i umjetnog horizonta, vidimo dosadan natpis "Nema podataka Mavlinka". To znači da OSD radi, rado bi vam nešto pokazao, ali ne prima podatke. To jest, nikakvi podaci s radne stanice ne dolaze na Rx pin. Prvi mogući razlog je da su žice pomiješane prilikom spajanja. Provjerite je li Rx s OSD-a spojen na Tx port na radnoj stanici. Drugi mogući razlog je taj što sam kontroler nije konfiguriran za slanje podataka na COM port. Da biste to učinili, u jednostavnom slučaju, na kartici POČETNA POSTAVKA > Opcijski hardver > OSD, morate pritisnuti gumb Omogući telemetriju. Istovremeno, MP automatski konfigurira niz parametara koji vam omogućuju slanje podataka na OSD. Ako ovaj čarobni gumb nije pomogao, onda ćete morati sve postaviti malim rukama. Da biste to učinili, idite na karticu CONFIG / TUNING > Full Parameter List, pomaknite se prema dolje do slova S i provjerite (ili ispravite) vrijednosti parametara:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POZICIJA = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Ako podaci i dalje ne dolaze, a još uvijek vidimo tupi natpis "No Mavlink Data", tada morate provjeriti je li OSD spojen na pravi port (članak govori o UART0), možda će vam trebati parametri SR1 ( isto kao što je gore opisano, samo za UART1 port). Također je moguće da OSD ne radi za vas zajedno s telemetrijskim modemom - u tom slučaju ćete možda morati spojiti ili, naprotiv, odspojiti Tx žicu na OSD-u. Također postoji greška da OSD ne radi kada je USB kabel spojen na računalo. Ili si možda samo pobrkao žice...
Podijelit ću još jednu fotografiju. Na mom kontroleru je zbog kvara prestao raditi glavni port za telemetriju, samo sam zalemio na UART0. A onda mi se svidjela ova veza.

Ovdje sam napajao izravno iz kontrolera. Ali OBAVEZNO je provjeriti što je ostalo od 5 volti do samog regulatora. U mom slučaju, sam kontroler se napaja iz prijemnika, a tamo je postavljen na nešto veći od 5 volti, tako da je, uzimajući u obzir prijamnik i minimOSD, za sam APM bio striktno 5 volti.
Treba se dotaknuti još jedne točke. Ako OSD neispravno treperi, pojavljuje se pogreška " nije uspio razgovarati s bootloaderom". Ova pogreška doslovno se prevodi kao "pogreška u razgovoru s bootloaderom". Može se dogoditi u slučaju zamršenih žica ili kada se bootloader sruši. Ako je u slučaju žica sve jasno (vidi gore kako se pravilno povezati), tada je u slučaju pokretača potreban postupak za vraćanje mikrokontrolera.
Vraćanje Bootloadera.
Za to nam je potreban barem programer. Prikladnije je koristiti USBasp.

možda će vam se svidjeti ovaj adapter (ISP10<>ISP6)
 ili ovaj kabel (dostupan na)
ili ovaj kabel (dostupan na)

Općenito, na ovaj ili onaj način, povezujemo se s ATMega328P pomoću programatora.
Pinout ISP konektora na OSD ploči je općenito prihvaćen. Obično je prvi kontakt kvadratni. Ako ne, najbolje je provjeriti gledajući Vcc i GND.

Na programatoru su pinovi obično potpisani, ako ne, onda to obično izgleda ovako:

Da biste to učinili, najprije odaberite vrstu programatora

Zatim odaberite vrstu ploče

I tipa mikrokontrolera


i pričekajte oko minutu dok se bootloader ne učita (pogledajte zelenu statusnu traku na dnu)
 Sve dok se ne pojavi poruka da je bootloader uspješno pokrenut
Sve dok se ne pojavi poruka da je bootloader uspješno pokrenut

(ne obraćamo pažnju na greške u nastavku, morate ažurirati firmware programatora)
Dalje - idite na OSD_Config.exe, popunite firmware i fontove, kao što je već opisano. Možda ćete morati dvaput učitati firmware (još jednom je potrebno za ispravnu inicijalizaciju kontrolera nakon učitavanja pokretača).
Pa, to je otprilike sve. Odjednom, tko ne zna, ima još. Ako ovdje nešto nije jasno, možete to "uživo" vidjeti tamo.
Sretno s instaliranjem OSD-a na vaš quad!
Uvijek tvoj, Ganiev Timur - 5yoda5.
5yoda5#apmcopter
Ažuriranje 11.11.2015.:“Pa, sve je zalemljeno, sada je naš šal spreman za spajanje na računalo. Za to nam je potreban FTDI adapter (na primjer, na RCTimeru ili bilo kojem drugom USB-UART TTL adapteru).
Ažuriranje 11. 3. 2016.: Dodane slike pinouta ISP-a.
Ako pronađete pogrešku na stranici, kliknite Shift+Enter ili da nas obavijestite.
U ovom vodiču ćemo pogledati i regularnu i Micro verziju, kako postaviti i koristiti MW-OSD firmware te kako se povezati s Naze32 i prijemnikom.
Što je MinimOSD i Micro MinimOSD
Iako je postavljanje puno kompliciranije od ostalih OSD-ova poput Super Simple OSD-a ili E-OSD-a koje odmah uključim i radim, MinimOSD ima mnoge prednosti i izgled zaslona je potpuno prilagodljiv.
Najkorisnije značajke: prikaz GPS koordinata, prilagodljivih stilova i fontova, pomoću izbornika na ekranu možete promijeniti koeficijente PID regulatora, stope itd. Primjer onoga što se može prikazati na ekranu.
Postavljanje PID koeficijenata kroz izbornik:

Dimenzije, težina, pinout, lemljenje za smanjenje dimenzija
MinimOSD pune veličine
Ovaj OSD postoji već mnogo godina. Prednost ove verzije (MinimOSD s KV Modom) je što sa strane ima pinove za spajanje strujnog senzora, RSSI, senzora napona itd. Prije smo sami morali vrlo pažljivo lemiti žice izravno na noge čipa, a to je bilo vrlo teško. Ova verzija je uvelike olakšala život. Kupio sam sebi jednu takvu ploču (verzija 2)

MinimOSD dimenzije s KV Mod V2: širina 21 mm, duljina: 43 mm, težina: 5,5 g (uključujući konektore).
Micro MinimOSD
Zadivljen sam mikro veličinom ovog OSD-a, ali ima sve značajke verzije pune veličine. Osim mogućnosti napajanja od 12V, što se u staroj verziji gotovo nikad nije koristilo, zbog pregrijavanja ploče. Stoga je bilo vrlo razumno izbaciti ovu funkcionalnost i smanjiti veličinu.

Mikro verzija je oko 1/3 puna težine i veličine.
Priključci za lemljenje
Lemljenje konektora na MinimOSD pune veličine bilo je jednostavno i jednostavno, ali za mikro verziju ne sviđa mi se način na koji ih ljudi obično leme.

Moja kreativa je koristiti kutne konektore umjesto ravnih, tako da imam dodatni prostor pri montaži unutar quada.
Na samom kraju pakiramo termoskupljajući materijal za zaštitu lemljenja i žica.
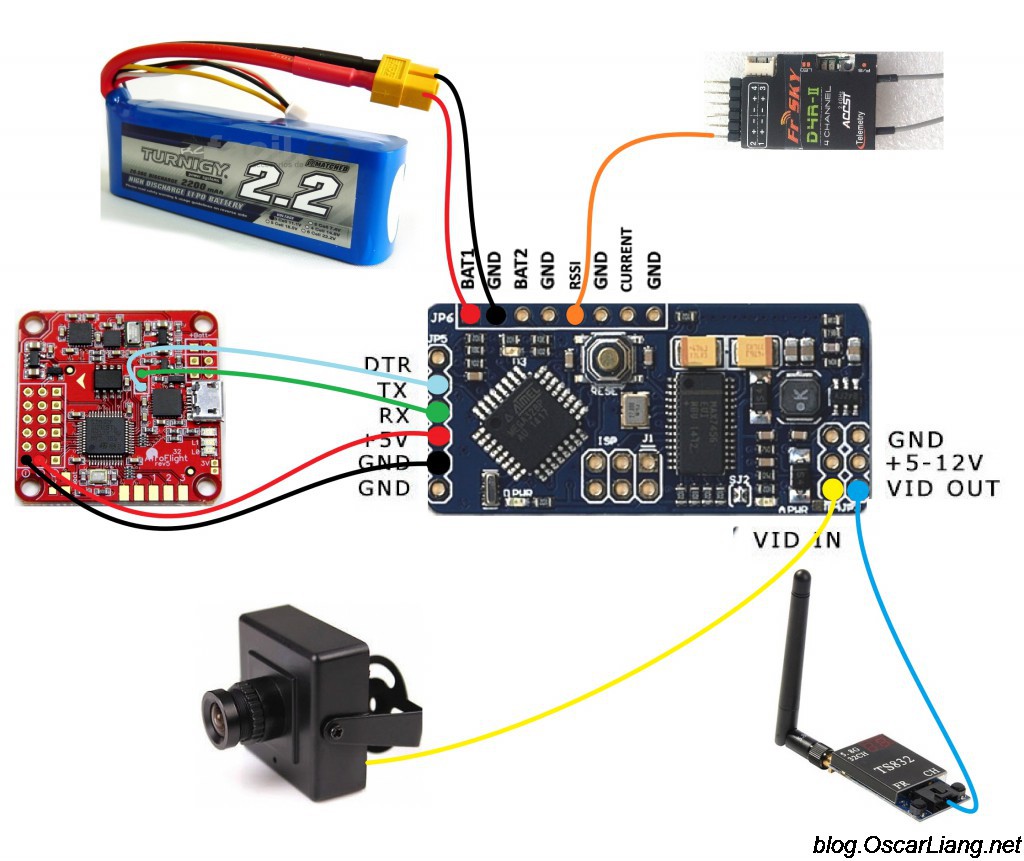
Spojite se na Naze32, bateriju, prijemnik, kameru, video odašiljač
Sastavljanje mog helikoptera je vrlo jednostavno. Ovdje na dijagramu sve što treba spojiti: Naze32, LiPo, prijemnik, FPV kamera i video odašiljač.

Shema povezivanja običnog MinimOSD-a s Naze32, kamerom, prijemnikom, video odašiljačem, baterijom.
Kako spojiti mikro verziju:

Često postavljano pitanje 1. Neki se žale da tekst nestaje kada se poveća gas. Rješenje: spojite svu elektroniku - kameru, OSD, video odašiljač na zajedničku masu.
FAQ 2. OSD se ne prikazuje, samo slika s kamere. Rješenje: pokušajte promijeniti standard PAL/NTSC u OSD postavkama.
Pin VBAT1 spojen je na glavnu litijsku bateriju za prikaz napona. RSSI pin je spojen na kontrolni prijemnik za prikaz razine signala (ako je prijemnik FrSky D4R-II, u CPPM načinu rada, tada je Pin1 PPM signal, PIN2 je RSSI izlaz).
Povezivanje s Naze32 putem serijskog porta (TX i RX) omogućit će Naze32 slanje podataka o letu na zaslon (GPS, smjer kompasa, itd.), a OSD će moći promijeniti PID koeficijente kontrolera leta pomoću daljinski upravljač.
Budi oprezan! Veza s računalom koristi isti serijski port, što znači da ako želite koristiti Baseflight ili Cleanflight konfigurator, prvo morate onemogućiti TX i RX iz OSD-a.
Bez veze serijskog porta, MinimOSD će sam prikazati RSSI i napon.
Ako koristite Taranis u PPM načinu, pročitajte ovaj članak: kako dobiti RSSI na zasebnom kanalu (bez dodatnih žica).
Ovako to izgleda unutar mog mini quada.
Konfiguriranje s MW-OSD GUI
Ima dosta firmware-a za MinimOSD, moj favorit je Multiwii-OSD (mwosd). Trenutna verzija je 1.3., njen konfigurator je vrlo zgodan program. Izbornik na ekranu je jasan, firmware je ažuriran, postoji podrška za Cleanflight i Baseflight. Također vam omogućuje podešavanje pojačanja PID-a izravno iz OSD-a.
Spojite MinimOSD na FTDI programator
I postavljanje i firmver zahtijevaju FTDI adapter. Veza ide preko 5 žica: DTR (GRN), TX, RX, 5V i GND.


Postavljanje MinimOSD-a pomoću MW-OSD GUI
Putem grafičkog sučelja možete konfigurirati prikaz svih podataka o letu. Jer Letim mini quadom, sve što trebam je napon baterije, RSSI i mjerač vremena. Koristim 4S litijeve baterije i upozorenje o niskoj bateriji postavljeno je na 13,6 V (3,4 V po ćeliji, iako bih trebao postaviti viši prag). Za 3S konfiguraciju, napon na kojem se pojavljuje upozorenje može se postaviti na 11V. Koristim FPV u PAL formatu

Jedina stvar oko koje treba brinuti je napon baterije. Zadana vrijednost je daleko od idealne, pa se morate poigrati s postavkama da biste dobili ispravnu vrijednost. Kako to učiniti:
Zadana vrijednost za " podešavanje napona" = 200, a napon prikazan na OSD-u bio je 21,0V. Uzeo sam multimetar, izmjerio napon na bateriji i dobio 11,1V

Sada smanjimo vrijednost podešavanje napona“do 110, sada imam 11,5 V na OSD zaslonu. Kako bismo izbjegli stalne promjene parametra naprijed-nazad, moramo izračunati točnu vrijednost koristeći matematiku i informacije koje već imamo 🙂 Moramo izračunati koliko volti daje 1 vrijednost parametra "prilagodba napona".
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Znamo da bi ispravna vrijednost na ekranu trebala biti 11,1V, tako da vrijednost " podešavanje napona"trebalo bi:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 je u redu)
značenje " podešavanje napona» može se mijenjati ne samo u konfiguratoru, već i putem izbornika na ekranu, tako da nema potrebe za spajanjem MinimOSD-a na računalo i korištenjem konfiguratora.
Arduino kao programer za MinimOSD?
Pokušao sam koristiti svoj Arduino UNO kao FTDI programator, kao što sam prije radio za druge uređaje. Uspio sam promijeniti OSD parametre kroz MW-OSD GUI program. Međutim, naišao sam na problem prilikom bljeskanja MinimOSD-a, poruka o pogrešci je bila:
avrdude: stk500_getsync(): nije sinkronizirano: resp=0x00.
Izgleda kao neka vrsta problema sa sinkronizacijom podataka, ali sam se pobrinuo da sam ispravno spojio DTR na RESET na Arduinu, ne znam što drugo da radim, pa sam koristio svoj FTDI programator za flešovanje MinimOSD-a.
OSD izbornik: Postavite PID-ove, brzinu, napon, RSSI
OSD izbornik je moja omiljena značajka i zato sam u osnovi odustao od SuperSimple OSD-a. Postoji mnogo postavki koje možete promijeniti bez spajanja na računalo. Na primjer, mogu promijeniti vrijednosti PID koeficijenata direktno na terenu pomoću daljinskog upravljača, bez bluetootha i računala! Međutim, u Cleanflight-u (engleski) ne možete zasebno mijenjati parametre brzine okretanja i brzine nagiba, u trenutku kada su povezani (možete mijenjati samo oba odjednom, pribl. Prijevod). U novoj verziji ovi će parametri biti neovisni.
Da biste došli do MW-OSD izbornika, prvo morate deaktivirati helikopter, a zatim:
- plin u sredini
- yaw (jaw) - pravo
- pitch (pitch) - naprijed.
Za navigaciju kroz izbornik:
- Roll / pitch (pitch / roll) - za kretanje kroz izbornik
- Yaw (yaw) - promijeniti vrijednosti
- PID konfiguracija (PID roll/pitch/yaw za različite načine leta)
- RC podešavanje (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (PID Att)
- Napon (prikaži ili ne napon, vrijednosti "Podešavanje napona", "Alarm napona", "Ćelije")
- RSSI (prikaži ili ne)
- Struja (prikaz potrošene struje ili ne, njena postavka)
- Napredno (jedinice: metri/inči, signal: Pal ili NTSC, kompas)
- Zaslon (prekidači, gas, GPS koordinate, senzori, kardan itd.)
- Statistika (udaljenost, maks. visina, maks. brzina, vrijeme leta)
treperi
Neki dobavljači MinimOSD-a sami flešuju najnoviju verziju, tako da ne morate brinuti o flešovanju. Ali možda ćete kasnije poželjeti ažurirati firmware ili isprobati drugi, provjeriti verziju firmwarea, uključiti OSD na quad-u i pogledati natpis na ekranu za pokretanje.
Svaki firmware u uputama detaljno opisuje kako flashati. Ovo je sažetak:
- Preuzmite datoteke firmvera.
- Preuzmite Arduino IDE
- Otvorite datoteke firmvera u Arduino IDE
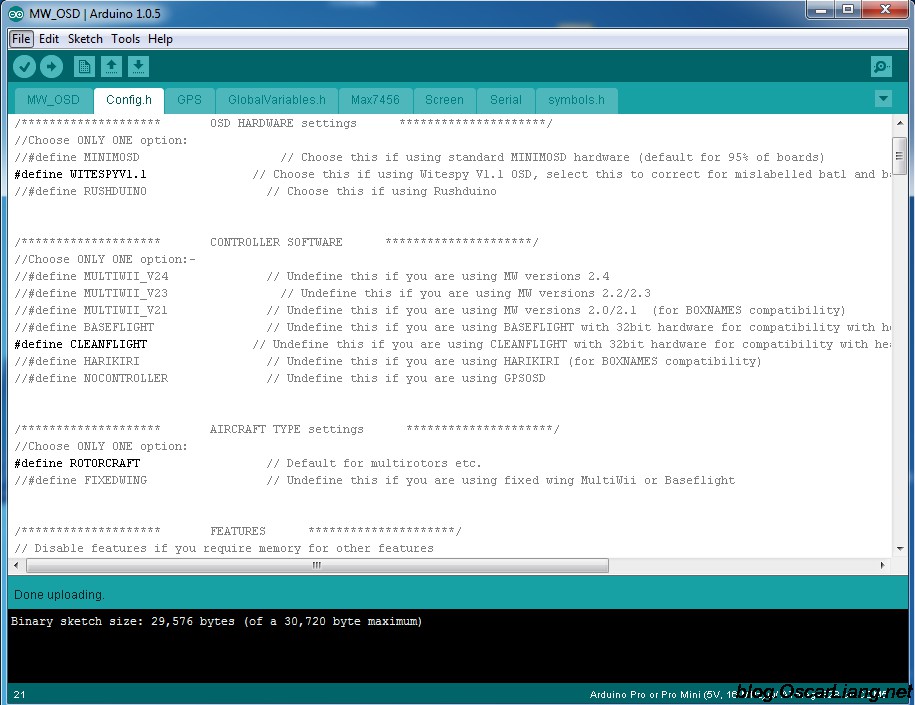
- Promijenite postavke ako je potrebno
- Nisam puno mijenjao, samo tip ploče (WitespyV1.1) i firmware kontrolera leta (Cleanflight)
- Spojite FTDI adapter (programator) na MinimOSD / Micro MinimOSD
- Kliknite Sastavi i prenesi
 OSD za ArduPilot Mega - sustav za preklapanje telemetrijskih podataka na video zapisu leta
OSD za ArduPilot Mega - sustav za preklapanje telemetrijskih podataka na video zapisu leta Zašto se moje Windows računalo ne povezuje s mojim telefonom u načinu Wi-Fi pristupne točke?
Zašto se moje Windows računalo ne povezuje s mojim telefonom u načinu Wi-Fi pristupne točke? Rješavanje problema s podešavanjem svjetline na prijenosnom računalu
Rješavanje problema s podešavanjem svjetline na prijenosnom računalu