Připojení mini osd k apm pro. OSD pro ArduPilot Mega je systém pro překrývání telemetrických dat na letovém videu. Plná velikost MinimOSD
Betaflight OSD (Information On Screen) je integrace informací z různých senzorů do video streamu prostřednictvím letového ovladače. Obvykle je OSD přídavná instalovaná deska nebo již integrovaný čip v letovém ovladači. OSD přenáší informace, jako je napětí baterie, horizont, nadmořská výška a další, na obrazovku helmy nebo brýlí.
Pomocí nabídky OSD můžete také změnit PID kvadrokoptéry, filtry a další nastavení. V tomto článku vysvětlím, co je Betaflight OSD, k čemu slouží a jak jej nastavit.
Betaflight OSD vs. MinimOSD (MWOSD)
Betaflight OSD je jednodušší a lepší než MinimOSD:
- První je již integrovaný čip v letovém ovladači, nemusíte nic pájet ani připojovat, zatímco MinimOSD je samostatná deska, na kterou je potřeba připájet všechny komponenty kvadrokoptéry, jako je PC, kamera, video vysílač a tak dále, podle toho, která čidla budete více používat. Kromě toho potřebujete programátora, který problikne tento modul přes počítač.
- Výhody Betaflight OSD: Snadné nastavení, protože vše je již integrováno. Konfigurace probíhá v GUI Betaflight. Nemusíte nic pájet, flashovat, nepotřebujete programátor a firmware modulů třetích stran.
- Betaflight OSD nezabírá port UART, protože je normálně připojen ke sběrnici SPI BUS.
I když nyní je MinimOSD již docela dobře vyvinuté a má také grafický shell a podobné vlastnosti.
Které letové ovladače podporují Betaflight OSD
Ne všechny letové ovladače s integrovaným OSD podporují Betaflight OSD, některé vyžadují další software pro nastavení OSD.
V současné době Betaflight OSD podporují následující letadla: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 a Betaflight F3.
Konfigurace Betaflight OSD
Nejprve se ujistěte, že máte nejnovější firmware letového ovladače, protože OSD je podporováno ve firmwaru Betaflight V3.1 a novějším.
Pokud již vaše letadlo má integrovaný OSD čip, jednoduše připojte kameru a video vysílač do příslušných portů.
Níže je uveden příklad, jak připojit kameru a vysílač k letovému ovladači DYS F4 Pro FC, kamera se připojí k „Vin“ a vysílač k „Vout“:
Nyní se připojte k Betaflight Configurator, přejděte na kartu Konfigurace a zapněte OSD:
Poté přejděte na kartu OSD a začněte s nastavením:
Co by mohlo být jednodušší než toto rozhraní? Stačí zapnout a vypnout data, která chcete zobrazit.
Video Format – Vyberte PAL nebo NTSC, podle toho, v jakém režimu je vaše FPV kamera. Pokud nevíte, v jakém režimu se kamera nachází, nastavte ji na AUTO, program vybere správný formát, aby kamera fungovala.
Důležitá informace: Pokud je obrazovka náhledu v režimu PAL nebo AUTO a váš fotoaparát je v normě NTSC, data zobrazená ve spodní části obrazovky budou oříznuta, to je funkce tohoto formátu, má kratší rámeček. Při použití formátu AUTO je nejlepší umístit potřebná data doprostřed obrazovky.
V bloku "Alarm" lze nastavit hodnoty RSSI, kapacitu baterie, předletový čas (stopky) a nadmořskou výšku. Jakmile se data začnou shodovat s těmito čísly, začnou blikat na obrazovce helmy nebo brýlí.
V okně náhledu můžete zobrazená data libovolně přetahovat, ale nedávejte je příliš blízko k okrajům, protože by pak mohla být oříznuta.
- Zobrazení napětí baterie
- Doba letu (stopky)
- jméno (vlastní)
- Hodnoty plynu
- Kolik proudu spotřebuje dron
- Kolik mAh kapacity baterie je promarněno
Chcete-li aktivovat nabídku OSD v brýlích nebo helmě, potřebujete kombinaci pohybů páky na dálkovém ovladači:
- plyn v centru
- vybočit (vybočit, osový val) vlevo
- sklon (pitch, tilt) dopředu
Plyn musí být uprostřed celého ladění!
Pro pohyb v nabídce použijte pravá páka na dálkovém ovládání. Pro posouvání - držte prst nahoru nebo dolů, pro výběr položky nabídky - držte vlevo / vpravo.
Zde můžete změnit PID, filtry, profily a tak dále. Většina těchto nastavení je samozřejmá, pokud jste již nakonfigurovali Betaflight prostřednictvím grafického uživatelského rozhraní na kartě OSD. Stále zde ale nejsou všechny položky, některé jsou dostupné pouze v samotném konfigurátoru. Po provedení nastavení přejděte do hlavní nabídky a klikněte na „ Uložit * Restartovat«.
Jak změnit písmo v Betaflight OSD
Pokud se vám nelíbí písmo zobrazené na obrazovce, můžete jej snadno změnit v Betaflight Configurator, přejděte na kartu OSD a dole bude tlačítko Správce písem:
Po výběru nového písma se v okně náhledu bude stále zobrazovat výchozí písmo, ale s brýlemi a helmou budete mít to, které jste si vybrali, takže se nemusíte bát.
Často kladené otázky
Proč nevidím data z OSD v náhlavní soupravě?
Zkontrolujte, zda jste zadali správný formát videa, PAL nebo NTSC, zkuste provést výměnu. Pokud stále nefunguje, zkontrolujte kabeláž a kvalitu pájení z kamery a vysílače do OSD modulu.
Jak změnit název?
V Betaflight, záložka config, přejděte dolů, bude tam textové pole "Název řemesla", můžete tam zadat jiný název.
Pro uživatele řadičů APM bylo vyvinuto speciální zařízení, Minim OSD, které překrývá telemetrická data. Zkratka OSD pochází z anglického On Screen Display, což znamená zobrazení doplňkových informací na obrazovce operátora.
Čínští výrobci vyrábějí oba letové ovladače - HKPliot Mega, ArduFlyer a ovladače OSD - MAVLink-OSD.

Externě se Minim OSD příliš neliší od MAVLink-OSD, je to jako zrcadlová kopie desky, kde je hlavní čip otočen o 45 stupňů. MAVLink-OSD také nemá propojky pro výběr typu video signálu a kombinaci výkonu digitální a analogové části.
Minim OSD v1.0 měl problémy s přehříváním při použití 12voltového napájení kamery, tento problém byl vyřešen ve verzi 1.1.
Vzhledem k tomu, že HK měla koncem roku 2013 problémy s dodávkou, objednal jsem MAVLink-OSD u RCTimeru.

Pro programování budete určitě potřebovat adaptér FTDI. Proto jsem spolu s MAVLink-OSD okamžitě vzal adaptér FTDI Tool V1.0 http://www.rctimer.com/product_684.html .

Ke konfiguraci a flashování zařízení budete potřebovat speciální software s názvem ArduCam-OSD. Stáhněte si nejnovější software a firmware ArduCam-OSD zde http://code.google.com/p/arducam-osd/downloads/list . V tuto chvíli je aktuální verze 2.0.
Můžete také nainstalovat alternativní firmware, projekt se nazývá minimosd-extra. Informace se nachází zde https://code.google.com/p/minimosd-extra/ . Pro firmware budete potřebovat vlastní utilitu - MinimOSD-Extra Config Tool. Archiv zpravidla obsahuje nástroj a firmware. Stáhnout si ho můžete zde https://code.google.com/p/minimosd-extra/downloads/list . Z množství verzí běží oči.
Desku a adaptér jsem zabalil do smršťovací fólie.
Konektor ovladače pro připojení je velmi nepohodlný, šestikolíkový, bez „blbuvzdorné“ ochrany. Všechny piny slouží k programování, ale pouze 4 piny slouží k připojení k letovému ovladači.
Pro programování zbývá najít mini-USB kabel.

Pokud jde o čtyřpinový konektor, zde je vše složitější. Při nesprávném zamíchání a připojení může vycházet kouř.
Připojuje OSD k letovému ovladači v konektoru telemetrie. Vodič k OSD musí být připojen k centrálním pinům: GND, VCC, RX, TX.
Pokud použijeme rádiový modem, pak jej zapojíme paralelně. Musel jsem tedy připájet Y-kabel.

Na fotce je vodič pro AIOP ovladač, ve kterém je k jednomu konektoru připojena i GPS.
Kabel jdoucí do TX mého OSD jsem neodstranil, aby byl univerzální, nikdy nevíte, kde tento drát ještě použiji.
Je třeba poznamenat, že pokud na analogovou část desky nepřipojíte 5 voltů, deska bude tichá.

Některé zdroje nabízejí předělat desku a napájet analogovou část z digitální, ale to jsem neudělal, protože existuje názor, že se může objevit rušení.
Pro ty, kteří se rozhodnou pro připojení z jednoho zdroje napájení, bude obvod takový, jak je znázorněno na fotografii.

Aktuálně mám analogovou část napájenou z video vysílače, o kterém jsem již mluvil ve svém předchozím článku.
Konfigurace OSD ArduCAM
Začněme nativním nástrojem ArduCAM OSD Config. V tuto chvíli je aktuální verze 2.1.2.0.
Z hlavních prvků by měla být zvýrazněna nabídka programu a také tři karty, které přepínají mezi následujícími obrazovkami: Konfigurace, Panel 1, Panel 2.
Config, zde je vše velmi jasné.
Nejprve vyberte číslo portu a klikněte na tlačítko Číst z OSD.

Je třeba poznamenat, že typ video signálu NTSC - PAL se přepíná prostřednictvím nabídky programu Video Mode. Položka nabídky Soubor umožňuje uložit a načíst nastavení nebo přejít na výchozí nastavení. V nabídce Možnosti můžete povolit režim mřížky pro Panel1 a 2, aktualizovat firmware, vybrat obrázek na pozadí, použít protokol pro nastavení, přidat vlastní písma.

Panel 1 se používá k přizpůsobení informací zobrazených přes video pro první obrazovku. Přepínání kanálů je nastaveno na volný kanál rádiového ovládání OSD Toggle Channel.

Podle toho jsme pro druhou obrazovku nastavili Panel 2.

Firmware se aktualizuje pomocí stejného nástroje.

Nástroj MinimOSD-Extra Config Tool
Když otevřeme program MinimOSD-Extra Config Tool, zdá se, že jsme pomíchali složky a znovu spustili ArduCAM OSD Config. To je první dojem, je to vlastně velmi podobné, ale je tam více nastavení.
Podívejme se na hlavní rozdíly.
První položkou je volba typu modelu: Letadlo, Koptéra.
Přidána možnost automatického přepnutí obrazovky na obrazovku zadanou v rozevírací nabídce (Warnings Auto Panel Switch), když se objeví varování. To je nutné, když jsou například na druhé obrazovce odstraněny všechny informace, aby nic nerušilo výhled.
Můžete si vybrat zobrazení baterie v procentech nebo mA.
A ještě jeden Zobrazit znak před blokem hodnot, který zodpovídá za zobrazování ikon před hodnotami.

První obrazovka

Druhá obrazovka

Výsledek
Nejprve jsem nainstaloval firmware přes ArduCAM OSD Config.

Vše bylo v zásadě normální, ale jedna nuance byla znepokojivá, což bylo vyjádřeno v následujícím.
Po připojení zařízení jsem si na obrazovce všiml, že některé informace vlevo jsou oříznuté. Ikony před hodnotami parametrů chybí z poloviny. Rozhodl jsem se zkusit změnit typ signálu na PAL, ve výsledku se to ještě zhoršilo, ořezalo to horní a spodní část obrazovky, tak jsem to vrátil na NTSC. Nechte to být pouze na jedné straně a ne na třech, zejména proto, že se můžete pokusit opravit tento nedostatek vlevo.

Přesunuté informace blokují jeden znak doprava.

Operace byla bezbolestná, na tohle bylo dost místa.


Ve výsledku se vše povedlo, ikony jsou nyní plně viditelné, informace jsou na obrazovce perfektně čitelné.
Byl však nainstalován firmware MinimOSD-Extra 2.4 R726, ale na obrazovce začal vydávat nějakou ostudu.

Obraz se stal nečitelným, informace byly zmatené na celé obrazovce.

Stažena starší verze 2.2.

S touto verzí firmwaru se informace začaly zobrazovat bez zkreslení.

závěry
Kompaktní a levné zařízení. Dostatečně univerzální pro použití s originálními deskami ArduPilot Mega (APM) a jejich klony HKPILOT Mega, ArduFlyer a také s řadiči řady AIO (All-In-One) s firmwarem MPNG nebo MultyWii. Na fórech jsou informace o připojení k ovladačům DJI Naza, ale to vyžaduje práci s páječkou v rukou.
Jediným negativem je šestipinový konektor na desce, do kterého zapojujeme kabel se čtyřpinovým konektorem. Může existovat mnoho variant, pokud uděláte chybu, můžete desku spálit, protože neexistuje žádná ochrana.
Musíte také pamatovat na napájení digitální a analogové části desky, jinak to nebude fungovat. Jaký způsob výživy zvolit, zde bude pro někoho výhodnější.
MinimOSD-Extra se mi samozřejmě líbil více, protože umožňuje provádět další nastavení, která nejsou v ArduCam OSD Config. Jak se ale ukázalo, stále musíme najít stabilní verzi. Narazil jsem na to, že u některého firmwaru je rozbitý výstup informací přes video. Podařilo se mi najít funkční verzi ne poprvé. Některé možnosti MinimOSD-Extra mi proto nebyly dostupné. To je bohužel mínus mnoha open source projektů.
Proto stojí za zmínku, že ArduCam-OSD Config je stabilnější a osvědčenější.
Ovladač provádí kvalitní překrytí informací na videu, text vypadá na malé obrazovce celkem jasně a dobře čitelný. Žádné zpomalení zobrazování informací jsem nezaznamenal.
OSD je užitečné příslušenství pro létání s kamerou. V tomto článku se podíváme na to, co je OSD, jak se připojuje k našemu FPV zařízení a nakonec na přehled možností různých OSD.
Pokud máte nějaké dotazy - dejte mi vědět v komentářích.
Co je OSD a jaké jsou jeho výhody
OSD znamená On Screen Display – tj. zobrazení na obrazovce nebo menu na obrazovce (tj. v horní části hlavního obrázku, obvykle z fotoaparátu, jsou zobrazeny některé další informace, většinou text). V našem koníčku je OSD malá deska s plošnými spoji, která zobrazuje letová data nad obrazem vaší kamery. To umožňuje sledovat stav kvadrokoptéry přímo během letu na kameře.
Pokud máte správné senzory a OSD, budete moci přímo ve svých brýlích nebo monitoru vidět letová data, jako je napětí baterie, kolik proudu odebírají vaše motory a další elektronika, vaši nadmořskou výšku, GPS souřadnice atd.
Díky tomu je létání kolem kamery bezpečnější, protože vidíte stav baterie, víte, kdy přistát, jak daleko jste již letěli a kterým směrem se musíte vrátit.
OSD není vyžadováno pro létání s kamerou, ale jak vidíte, je nesmírně užitečné. Většina lidí si kupuje alespoň SimpleOSD, aby viděli napětí na baterii, je to nutné, aby nedošlo k nadměrnému vybití (pokud letíte daleko, není slyšet siréna signalizující vybitou baterii).
Datové typy, které lze zobrazit pomocí OSD
Na obrázku je nejčastěji používaný soubor dat při létání kolem kamery.

Časovač
V závislosti na typu vašeho OSD to může být doba letu (počínaje okamžikem, kdy vzlétnete) nebo provozní doba (počínaje okamžikem zapnutí kvadrokoptéry). Některé OSD umožňují zobrazit více typů časovačů.
Napeti baterky
Téměř všechny OSD umožňují zobrazit napětí. Toto je nejdůležitější informace při letu kolem kamery, abyste věděli, kdy přistát (obvykle přistávám, když napětí klesne na 3,5V na článek)
Aktuální spotřeba
Pokud máte proudový senzor, můžete sledovat, kolik proudu odebírají motory a kolik mAh vaší baterie již bylo spotřebováno.
RSSI
RSSI je údaj o síle signálu vašeho vysílače, obvykle vyjádřený v procentech. Čím dále poletíte, tím slabší bude signál, tato informace vám pomůže zjistit, ve kterém bodě byste se měli vrátit.
RSSI je výstup z vašeho řídicího přijímače, obvykle ve formátu PWM, takže možná budete potřebovat D/A převodník a dolní propust.
Varování
Některá OSD mohou zobrazovat různé alarmy, varování, pro které musíte jako uživatel nastavit prahové hodnoty parametrů, jako je napětí baterie, hodnota RSSI atd.
Režim Letadlo
Zobrazuje aktuální režim letu vašeho letadla. Tyto informace se vám budou hodit, pokud často přepínáte mezi různými režimy jako Loiter (vznášet se na místě), manuální režim, samonivelační režim, takže se nemusíte divit, v jakém režimu se letadlo aktuálně nachází. K tomu budete muset připojit letový ovladač k OSD.
GPS
Pomocí GPS získáte nejen souřadnice dronu, ale také jeho nadmořskou výšku (i když to bude přesnější než pomocí barometru nebo sonaru). Díky chytrým výpočtům vidíme rychlost nad zemí, vzdálenost k výchozímu bodu a jeho souřadnice (grafické zobrazení směru k výchozímu bodu je velmi užitečná věc, zvláště pokud se trochu ztratíte).
Horizont
Virtuální horizont vám pomůže pochopit, jak je dron v prostoru nakloněn.
OSD připojení v kameře, video vysílači a letovém ovladači
Rozdělil bych všechna OSD do 3 typů:
- Samostatné OSD
- OSD závisí na letovém ovladači
- hybridní
Samostatné OSD se připojují pouze ke kameře a video vysílači a nekomunikují s letovým ovladačem. Někdy mohou být připojeny přímo k GPS nebo jiným senzorům, aby měly přístup k jejich naměřeným hodnotám. Dobrým příkladem tohoto typu je Skylark OSD (+GPS a aktuální senzor) a Super Simple OSD.
OSD závislé na ovladači se spoléhají pouze na data z letového ovladače, obvykle přes sériový port (RX/TX). Samotné OSD nedělá nic jiného, než že tato data zobrazuje. MinimOSD od Hobbyking je dobrým příkladem tohoto typu OSD (pokud verze není upravena, jako KV mod). Výhodou tohoto typu je, že OSD využívá data přijatá ze senzorů regulátoru, což znamená, že regulátor sám tato data využívá ke zjednodušení správy a ovládání. Zatímco v případě samostatných OSD nemůže letový ovladač používat data ze senzorů připojených k OSD.
Hybridní typ OSD lze použít jako samostatný OSD (s omezenou funkčností) a lze jej také připojit k ovladači pro zvýšení sady zobrazených letových údajů. MinimOSD s KV modem je skvělým příkladem tohoto typu OSD: pokud je použit jako samostatný, vidíte pouze RSSI a napětí, ale po připojení k ovladači s GPS pak uvidíte aktuální letový režim, GPS souřadnice, nadmořskou výšku , atd.
Nejjednodušší připojení – Samostatné OSD
Jako příklad připojte Hobbyking Super Simple OSD k FPV kameře, video vysílači a 3S lithiové baterii.

Teoreticky můžete sledovat napětí na druhé baterii pomocí portu Bat2.
Připojení hybridních OSD
Podotýkám, že v tomto případě OSD nezávisle měří napětí baterie a úroveň RSSI (i když je možné je připojit k řadiči a přenášet data přes jeho sériový port, obě možnosti fungují dobře).
Pokud potřebujete zobrazit souřadnice, směr k výchozímu bodu a vzdálenost k němu, musíte připojit GPS k Naze32.
OSD, které jsem již použil
MinimOSD s KV Team Mod
MinimOSD je momentálně moje oblíbené OSD a je to, které používám. Stažením příslušného firmwaru lze MinimOSD používat s deskami Naze32, CC3D, Multiwii, APM a PixHawk. Jedná se o velmi dobrou desku, která dokáže zobrazit naprosto jakékoli informace o letu, které jsou dostupné ze senzorů.

MinimOSD dokáže zobrazit jakékoli informace dostupné ze senzorů
Hobbyking a Banggood prodávají MinimOSD, ale mají původní verzi, která nemá další kolíky na straně pro RSSI, napětí baterie atd. Nekontaktoval bych je, pokud je možné zakoupit MinimOSD KV Mod.
MinimOSD Micro

Úplně stejné OSD, jak je popsáno výše, rozdíl je v menší velikosti. Navíc na něm není převodník 12V -> 5V, ale to není důležité, protože. každopádně tento převodník nikdo nepoužívá kvůli přehřívání desky.
BrainFPV
Tato deska také ukazuje cokoliv, s příslušnými senzory.

V článku se budeme zabývat připojením, flashováním a konfigurací MinimOSD. A také si odpovíme na otázku, co dělat – když se něco pokazilo, a co dělat – aby vše neskončilo smutně.
« Peťko - přístroje!?!? -Tři sta!!! -Co je tři sta??? -A co nástroje?
MinimOSD. Levný a velmi užitečný šátek. Umožňuje vám vidět, co se nyní děje s helikoptérou – aktuální napětí, kolik bylo spotřebováno ampérů, kolik bylo zachyceno globálních družic pro určování polohy, a také vás nenechá „ztratit se“ na obloze. Není možné se ztratit v nebi, říkáte? A tady je to velmi možné. Počínaje elementárním „vzlétlo to, ach, ale shora je všechno jinak ... ach, kde jsem to já?“, konče obtížnými letovými podmínkami, například letem ve tmě nebo ve srážkách, nebo náhodným vletem do cloud, jako ve videu níže:
Ve čtvrté minutě už jen zachraňující šipka „domů“ naznačovala, kam letět.
Dobře, dobře, dost textů, pojďme cvičit!
PŘÍPRAVA.
MinimOSD jste si tedy objednali pro sebe. Na Banggood nebo Hobbyking nebo RCTimer - bez ohledu na to, kde, a dostal jsem něco takového:
Svrbí mě ruce, abych to připojil k pracovní stanici a viděl, co to ukáže. Ale nemusíte to dělat všechno najednou! Je to plné objednání nového OSD - a to je ztracený čas (což je hlavní) a samozřejmě ztracené peníze.
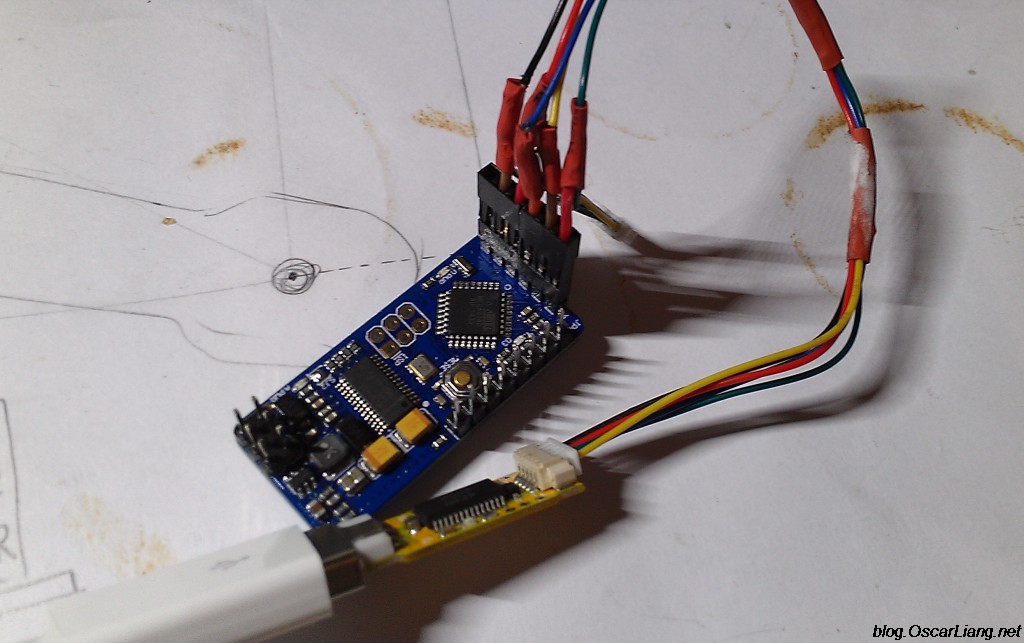
Na desce jsou dva velké čipy: ATMEGA328P a MAX7456. První mikroobvod (přesněji mikrokontrolér) je zodpovědný za komunikaci s letovým ovladačem („digitální část“ desky). A druhým je jednokanálové monochromatické OSD (OnScreenDisplay - nabídka na obrazovce) od Maxima, říkejme tomu "analogová část" desky. Takže tento MAX7456 je poněkud rozmarný mikroobvod. Nemá ráda přehřívání, nemá ráda prudké skoky mezi „digitální“ zemí a „analogovou“ – zkrátka se snadno spálí. A jako štěstí, líní Číňané NIKDY nepájejí běžný chladič mikroobvodu (na "břicho"). Pokud použijete kapesník v podobě, ve které přišel - MAX bude hořet - 80% záruka. Aby se to nestalo, připájeme tři otvory označené na fotografii níže.

Chcete-li to provést, vložte do otvoru tenkou pájku (průměr 1 mm, je žádoucí, aby byla okamžitě s tavidlem) a zahřejte ji páječkou:

A tady je výsledek (pájení není moc dobré, ale jak nejlépe umím – půjde vám to lépe!)

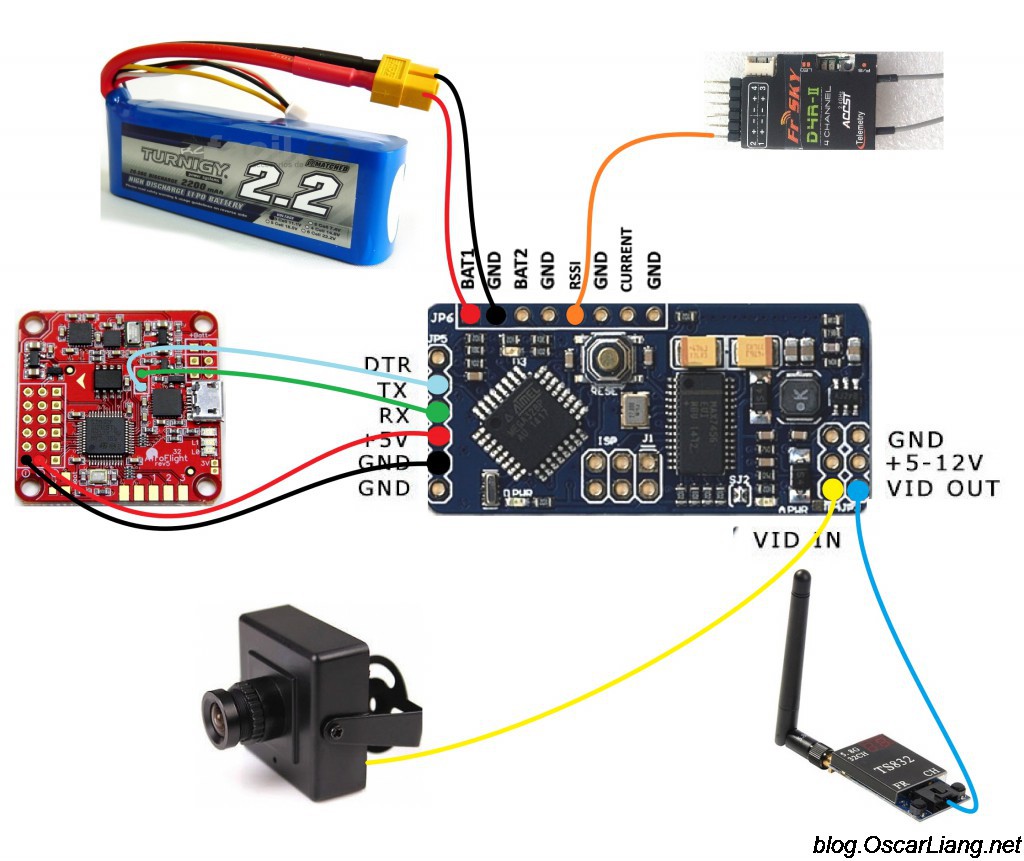
Nyní o vlastnostech připojení. Pozorní lidé si všimli, že jsem propojku připájel shora. Existuje několik způsobů, jak připojit MinimOSD a mnoho kopií je rozbitých, což je lepší nebo správnější nebo méně ruší. Používám způsob připojení s kombinací digitální a analogové země a napájení z 5V z "digitální" části. Vzhledem k tomu, že minimOSD má poměrně velkou spotřebu, je lepší desku napájet ze samostatného zdroje. Vypadá to skoro takto:

To znamená, že nahoře jsem připájel propojku, čímž jsem sjednotil uzemnění. A ještě musíte upustit jeden propojka na "přední" stranu desky.

PŘIPOJENÍ A NASTAVENÍ
No, vše je zapájeno, nyní je náš šátek připraven k připojení k počítači. K tomu potřebujeme adaptér FTDI (například zapnutý nebo jakýkoli jiný adaptér USB-UART TTL).

Připojíme pomocí 5 vodičů, schéma zapojení je následující: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (na straně OSD) - připojíme k adaptéru FTDI 1. DTR , 2. Rxi, 3. Txo, 4. VCC, 5. GND. Zde je obrázek toho, jak je to pro mě zapojeno:

Pokud to není jasné, podívejte se na toto video, zvláště pozorně v čase 1:03
Nyní, co stáhnout a jak nakonfigurovat. Pro začátek řeknu, že pro vrtulníky a pro letadla je firmware odlišný. Existuje také firmware pro Multivia (kvTeam) a existují také samostatné mody - od nezávislé práce (bez letového ovladače) až po připojení k Naze.
Zde ale uvažujeme o "klasickém" pouzdru - copteru na AWP ovladači. oficiální stránka projektu. stránku ke stažení (pro helikoptéru pod AWP musíte načíst ExtraCopter). Ale to jsou staré verze, lidé toho od té doby dost upravili. Moderní firmware je v . V době psaní tohoto článku se jedná o firmware R800, leží (uživatel MinimOSD_Extra, heslo Top_Secret), na Ya.Disk.
Archiv obsahuje samotný firmware (HEX - soubor), soubor s fonty (mcm - soubor) a samotný program (OSD_Config.exe).
Nejprve přejdeme do správce zařízení a zkontrolujeme rychlost portu FTDI (nastavíme 115200):

Spustíme program OSD_Config.exe, vybereme port, stiskneme tlačítko „Read From OSD“, měla by se objevit zpráva o úspěšném čtení. Vzhledem k tomu, že není známo, jaký firmware je načten z výroby, abychom v budoucnu neměli problémy, naplníme jej novým. Chcete-li to provést, klepněte na nabídku Možnosti > Aktualizovat firmware

vyberte soubor a nahrajte jej.
Obdržíme zprávu o úspěšném firmwaru

Poté se regulátor inicializuje a načte nastavení do programu, což bude hlášeno

Je čas stáhnout soubor písma, který odpovídá firmwaru (pokud to neuděláte, vzhled OSD se může ukázat jako velmi vtipný nebo dokonce nečitelný). Stiskněte nabídku Možnosti>Aktualizovat znakovou sadu,

vyberte soubor MCM a nahrajte jej

Čekáme na připravenost

Po nalití se ovladač znovu inicializuje.



Dovolte mi to trochu vysvětlit:
RSSI kanál - převod RSSI na procenta. Kde 5 voltů je 255 (maximum v osmičce). A přijímač FRsky má maximální signál 3,3 voltu. Pokud zaškrtnete políčko RSSI enable RAW, pak na obrazovce FPV uvidíme „surová“ data. Právě je můžeme vrazit do nastavení. Nebo můžete zadat moje hodnoty.
Další jemnost - přepínání obrazovek OSD. Jak vidíte, jsou zde dva panely pro data. Můžeme přepnout na tři možnosti zobrazení - obrazovka1 (Panel1), obrazovka2 (Panel2), prázdná obrazovka bez dat (Zakázáno). K tomu se musíme nejprve rozhodnout, jak přesně budeme mezi obrazovkami přepínat. Pokud například přepínáme mezi obrazovkami pomocí otočného nebo třípolohového přepínače, pak budeme mít tři rozsahy hodnot podle kanálů (Panel1: 0-1233, Panel2: 1233-1467, Vypnuto: 1467- 1701). V tomto případě musí být přepínač Rotation Switching vypnutý. A pokud přepínáme jednoduchým dvoupolohovým páčkovým přepínačem, pak má smysl povolit Rotation Switching. Zároveň, když je přepínač zapnutý, budeme postupně přepínat obrazovky (Panel1 -> Panel2 -> Vypnuto -> Panel1 ......), pokud je přepínač vypnutý, přepínání mezi obrazovkami bude stop. Který kanál bude přepínat obrazovky, je určeno v rozevíracím seznamu s názvem OSD Toggle Channel. Dal jsem to na kanál číslo 6. A je tu další přepadení, které někteří (včetně mě) zpočátku mate - Warning Auto Panel Switch. Tento seznam definuje, na kterou obrazovku se má přepnout, pokud dojde k některému z dříve definovaných varování. Zdálo by se, že je vše jasné. Letíte sami, něco se stalo za letu, OSD se přepnulo na obrazovku, na kterou jste se zeptali. Ale tady je otázka - nastavujeme přepínání mezi obrazovkami, zpravidla se to nakonfiguruje doma, helikoptéra nelétá, chceme zkontrolovat - obrazovky se nepřepínají! Protože ale doma většinou GPS Fix není – zkrátka zafungovalo varování! Takže přepínání mezi obrazovkami „nefunguje“ ... 🙂
Nevím, jestli ostatní parametry potřebují objasnění, možná článek doplním později.
Mohu jen říci, že při nastavování hlavní obrazovky byste tam neměli strkat vše najednou. Je lepší nejprve vše vypnout (ve sloupci vlevo) a teprve poté zapnout pouze to, co potřebujete, a okamžitě to umístit do pravé části obrazovky. Doporučuji ponechat prázdné místo na okrajích obrazovky, lze jej odříznout monitorem nebo DVR stylusem nebo brýlemi.
Dále další důležitý bod - Nastavení OSD v Mission Planner. Předpokládejme, že jste vše propojili, jak má, ale místo vtipných čísel a umělého horizontu vidíme nudný nápis „No Mavlink Data“. To znamená, že OSD funguje, rád by vám něco ukázal, ale nepřijímá data. To znamená, že na pin Rx nepřicházejí žádná data z pracovní stanice. Prvním možným důvodem je, že se při připojování zapletou vodiče. Zkontrolujte, zda je Rx z OSD připojen k portu Tx na pracovní stanici. Druhým možným důvodem je, že samotný řadič není nakonfigurován pro odesílání dat na COM port. Chcete-li to provést v jednoduchém případě na kartě POČÁTEČNÍ NASTAVENÍ > Volitelný hardware > OSD, musíte šťouchnout do tlačítka Povolit telemetrii. MP zároveň automaticky konfiguruje řadu parametrů, které umožňují odesílat data do OSD. Pokud toto magické tlačítko nepomohlo, budete muset vše nastavit pomocí malých rukou. Chcete-li to provést, přejděte na kartu CONFIG / TUNING > Úplný seznam parametrů, přejděte dolů na písmeno S a zkontrolujte (nebo opravte) hodnoty parametrů:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Pokud data stále nepřicházejí a stále vidíme matný nápis „No Mavlink Data“, musíte zkontrolovat, zda je OSD připojeno ke správnému portu (článek hovoří o UART0), možná budete potřebovat parametry SR1 ( stejné, jak je popsáno výše, pouze pro port UART1). Je také možné, že vám nefunguje OSD spolu s telemetrickým modemem - v tomto případě budete muset připojit nebo naopak odpojit Tx vodič na OSD. Je zde také závada, že OSD nefunguje, když je USB kabel připojen k počítači. Nebo jsi možná jen popletl dráty...
Podělím se ještě o jednu fotku. Na mém ovladači mi kvůli havárii přestal fungovat hlavní port pro telemetrii, jen jsem připájel na UART0. A pak se mi toto spojení líbilo.

Zde jsem napájel přímo z ovladače. Ale je POVINNÉ zkontrolovat, co zbývá z 5 voltů do samotného regulátoru. V mém případě je samotný ovladač napájen z přijímače a tam je nastaven na trochu vyšší než 5 voltů, takže s přihlédnutím k přijímači a minimOSD to pro samotný APM bylo striktně 5 voltů.
Je třeba se dotknout ještě jednoho bodu. Pokud OSD bliká nesprávně, zobrazí se chyba " se nepodařilo komunikovat s bootloaderem". Tato chyba se doslova překládá jako „chyba při komunikaci se zavaděčem“. Může nastat buď v případě zamotaných drátů, nebo při havárii bootloaderu. Pokud je v případě vodičů vše jasné (viz výše, jak správně připojit), pak v případě bootloaderu je potřeba postup pro obnovu mikrokontroléru.
Obnovení bootloaderu.
K tomu potřebujeme alespoň programátora. Výhodnější je použít USBasp.

možná se vám bude líbit tento adaptér (ISP10<>ISP6)
 nebo tento kabel (k dispozici na)
nebo tento kabel (k dispozici na)

Obecně se tak či onak připojujeme k ATMega328P pomocí programátoru.
Pinout konektoru ISP na desce OSD je obecně akceptován. Obvykle je první kontakt čtvercový. Pokud ne, je nejlepší to ověřit pohledem na Vcc a GND.

Na programátoru jsou piny obvykle podepsané, pokud ne, pak to obvykle vypadá takto:

Chcete-li to provést, nejprve vyberte typ programátoru

Poté vyberte typ desky

A typ mikrokontroléru


a počkejte asi minutu, dokud se bootloader nenačte (podívejte se na zelený stavový řádek dole)
 Dokud se neobjeví zpráva, že bootloader byl úspěšně flashován
Dokud se neobjeví zpráva, že bootloader byl úspěšně flashován

(níže uvedeným chybám nevěnujeme pozornost, je třeba aktualizovat firmware programátoru)
Dále - přejděte na OSD_Config.exe, vyplňte firmware a fonty, jak již bylo popsáno. Možná budete muset nahrát firmware dvakrát (ještě jednou je potřeba pro správnou inicializaci řadiče po nahrání bootloaderu).
No a to je asi vše. Najednou, kdo nezná, je toho víc. Pokud zde není něco jasné, můžete si to tam "naživo" prohlédnout.
Hodně štěstí při instalaci OSD na vaší čtyřkolce!
Navždy Tvůj, Ganiev Timur - 5 let5.
5yoda5#apmcopter
Aktualizace 11. 11. 2015:"Všechno je připájeno, náš šátek je nyní připraven k připojení k počítači." K tomu potřebujeme adaptér FTDI (například na RCTimeru nebo jakýkoli jiný adaptér USB-UART TTL).
Aktualizace 11/03/2016: Přidány obrázky pinoutů ISP.
Pokud na stránce najdete chybu, klikněte Shift+Enter nebo nás upozornit.
V tomto návodu se budeme věnovat běžné i Micro verzi, jak nastavit a používat firmware MW-OSD a také jak se připojit k Naze32 a přijímači.
Co je MinimOSD a Micro MinimOSD
Přestože je nastavení mnohem komplikovanější než u jiných OSD, jako je Super Simple OSD nebo E-OSD, které zapojím a okamžitě funguji, má MinimOSD mnoho výhod a vzhled obrazovky je plně přizpůsobitelný.
Nejužitečnější funkce: zobrazení souřadnic GPS, přizpůsobitelné styly a fonty, pomocí nabídky na obrazovce můžete měnit koeficienty PID regulátorů, sazby atd. Příklad toho, co lze zobrazit na obrazovce.
Nastavení PID koeficientů přes menu:

Rozměry, hmotnost, pinout, pájení pro zmenšení rozměrů
Plná velikost MinimOSD
Toto OSD existuje již mnoho let. Výhodou této verze (MinimOSD s KV Mod) je, že má na boku piny pro připojení proudového čidla, RSSI, napěťového čidla atd. Dříve jsme museli velmi pečlivě připájet dráty přímo k nohám čipu sami, a to bylo velmi obtížné. Tato verze hodně usnadnila život. Koupil jsem si jednu takovou desku (verze 2)

Rozměry MinimOSD s KV Mod V2: šířka 21 mm, délka: 43 mm, hmotnost: 5,5 g (včetně konektorů).
Micro MinimOSD
Jsem ohromen mikro velikostí tohoto OSD, ale má všechny funkce plné verze. Kromě možnosti napájení z 12V, které se u staré verze téměř nepoužívalo, kvůli přehřívání desky. Bylo tedy velmi rozumné tuto funkci vyhodit a zmenšit velikost.

Mikro verze má asi z 1/3 plnou hmotnost a velikost.
Pájecí konektory
Připájení konektorů na plnou velikost MinimOSD bylo snadné a přímočaré, ale u mikro verze se mi nelíbí, jak je lidé obvykle pájí.

Moje kreativa je používat úhlové konektory místo rovných, takže při montáži uvnitř čtyřkolky mám více místa.
Na úplný konec zabalíme tepelně smrštitelné, abychom chránili pájení a dráty.
Připojení k Naze32, baterii, přijímači, kameře, video vysílači
Montáž mého vrtulníku je velmi jednoduchá. Zde ve schématu vše, co je potřeba připojit: Naze32, LiPo, přijímač, FPV kamera a video vysílač.

Schéma zapojení běžného MinimOSD s Naze32, kamera, přijímač, video vysílač, baterie.
Jak připojit mikro verzi:

Často kladená otázka 1. Někteří si stěžují, že při zvýšení plynu text zmizí. Řešení: připojte veškerou elektroniku - kameru, OSD, video vysílač na společnou zem.
FAQ 2. OSD se nezobrazí, pouze obraz z kamery. Řešení: zkuste změnit standard PAL/NTSC v nastavení OSD.
Pin VBAT1 je připojen k hlavní lithiové baterii pro zobrazení napětí. Pin RSSI je připojen k řídicímu přijímači pro zobrazení úrovně signálu (pokud je přijímač FrSky D4R-II, v režimu CPPM, pak Pin1 je signál PPM, PIN2 je výstup RSSI).
Připojení k Naze32 přes sériový port (TX a RX) umožní Naze32 odesílat letová data na obrazovku (GPS, kurz kompasu atd.) a OSD bude moci měnit PID koeficienty letového ovladače pomocí dálkový ovladač.
Buď opatrný! Připojení k počítači používá stejný sériový port, což znamená, že pokud chcete použít konfigurátor Baseflight nebo Cleanflight, musíte nejprve vypnout TX a RX z OSD.
Bez připojení k sériovému portu bude MinimOSD samostatně zobrazovat RSSI a napětí.
Pokud používáte Taranis v režimu PPM, přečtěte si tento článek: jak získat RSSI na samostatném kanálu (bez dalších kabelů).
Takhle to vypadá uvnitř mé mini čtyřkolky.
Konfigurace pomocí MW-OSD GUI
Firmware pro MinimOSD je poměrně dost, můj oblíbený je Multiwii-OSD (mwosd). Aktuální verze je 1.3., její konfigurátor je velmi šikovný program. Nabídka na obrazovce je přehledná, firmware je aktualizován, nechybí podpora Cleanflight a Baseflight. Umožňuje také upravit zesílení PID přímo z OSD.
Připojte MinimOSD k programátoru FTDI
Nastavení i firmware vyžadují adaptér FTDI. Připojení probíhá přes 5 vodičů: DTR (GRN), TX, RX, 5V a GND.


Nastavení MinimOSD pomocí GUI MW-OSD
Prostřednictvím grafického rozhraní můžete nakonfigurovat zobrazení libovolných letových údajů. Protože Létám na mini čtyřkolce, stačí mi napětí baterie, RSSI a časovač. Používám lithiové baterie 4S a varování před vybitou baterií je nastaveno na 13,6 V (3,4 V na článek, i když bych měl nastavit vyšší práh). Pro konfiguraci 3S lze napětí, při kterém se objeví varování, nastavit na 11V. FPV používám ve formátu PAL

Jediné, čeho se obávat, je napětí baterie. Výchozí hodnota zdaleka není ideální, takže si musíte pohrát s nastavením, abyste získali správnou hodnotu. Jak to udělám:
Výchozí hodnota pro " nastavení napětí" = 200, a napětí zobrazené v OSD bylo 21,0 V. Vzal jsem multimetr, změřil napětí na baterii a vyšlo 11,1V

Nyní snižme hodnotu upravit napětí„až 110, teď mám na obrazovce OSD 11,5 V. Abychom se vyhnuli neustálým změnám parametru tam a zpět, musíme vypočítat přesnou hodnotu pomocí matematiky a informací, které již máme 🙂 Musíme vypočítat, kolik voltů dává 1 hodnotu parametru "voltage adjust".
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Víme, že správná hodnota na obrazovce by měla být 11,1 V, takže hodnota " upravit napětí"mělo by:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 je v pořádku)
Význam " upravit napětí” lze změnit nejen v konfigurátoru, ale také prostřednictvím nabídky na obrazovce, takže není nutné připojovat MinimOSD k počítači a používat konfigurátor.
Arduino jako programátor pro MinimOSD?
Zkusil jsem použít svůj Arduino UNO jako programátor FTDI, jako jsem to udělal dříve pro jiná zařízení. Podařilo se mi změnit parametry OSD přes program MW-OSD GUI. Při flashování MinimOSD jsem však narazil na problém, chybová zpráva byla:
avrdude: stk500_getsync(): není synchronizováno: resp=0x00.
Vypadá to na nějaký problém se synchronizací dat, ale ujistil jsem se, že jsem správně připojil DTR k RESETu na Arduinu, nevím, co jiného mám dělat, tak jsem použil svůj FTDI programátor k flashování MinimOSD.
Nabídka OSD: Nastavte PID, rychlost, napětí, RSSI
OSD Menu je moje oblíbená funkce, a to je v podstatě důvod, proč jsem se vzdal SuperSimple OSD. Existuje mnoho nastavení, která můžete změnit bez připojení k počítači. Například mohu měnit hodnoty PID koeficientů přímo v terénu pomocí svého dálkového ovládání, bez bluetooth a počítače! Parametry roll rate a pitch rate však nemůžete samostatně měnit v Cleanflight (anglicky), v tuto chvíli jsou propojeny (lze změnit pouze oba najednou, cca Transl.) V nové verzi budou tyto parametry nezávislé.
Chcete-li se dostat do nabídky MW-OSD, musíte nejprve deaktivovat vrtulník a poté:
- plyn uprostřed
- yaw (yaw) - správně
- pitch (pitch) - vpřed.
Chcete-li se pohybovat v nabídce:
- Roll / pitch (pitch / roll) - pro pohyb v nabídce
- Yaw (vybočit) - pro změnu hodnot
- PID Config (Roll/Pitch/Yaw PID pro různé letové režimy)
- RC Tuning (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (Throttle PID Att)
- Napětí (zobrazit nebo nezobrazit napětí, hodnoty "Upravit napětí", "Alarm napětí", "Články")
- RSSI (zobrazit nebo ne)
- Proud (zobrazit spotřebovaný proud nebo ne, jeho nastavení)
- Pokročilé (jednotky: metry/palce, signál: Pal nebo NTSC, kompas)
- Displej (spínače, plyn, GPS souřadnice, senzory, gimbal atd.)
- Statistiky (vzdálenost, max. výška, max. rychlost, doba letu)
blikání
Někteří prodejci MinimOSD sami flashují nejnovější verzi, takže se flashování bát nemusíte. Možná však později budete chtít aktualizovat firmware nebo zkusit jiný, zkontrolovat verzi firmwaru, zapnout OSD na čtyřkolce a podívat se na nápis na spouštěcí obrazovce.
Každý firmware v návodu podrobně popisuje, jak flashovat. Toto je shrnutí:
- Stáhněte si soubory firmwaru.
- Stáhněte si Arduino IDE
- Otevřete soubory firmwaru v Arduino IDE
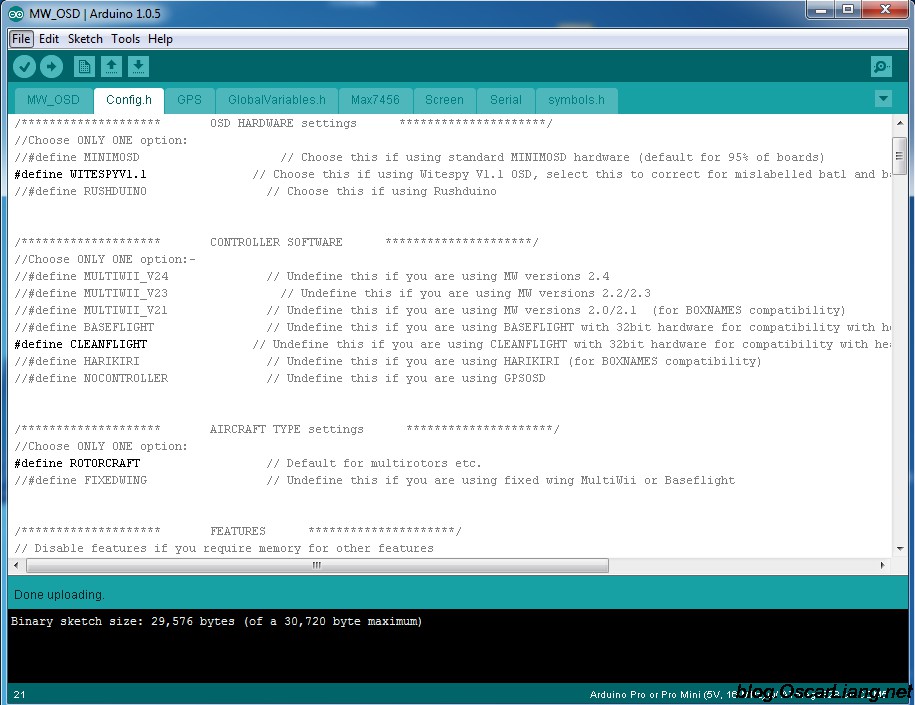
- V případě potřeby změňte nastavení
- Moc jsem toho nezměnil, pouze typ desky (WitespyV1.1) a firmware letového ovladače (Cleanflight)
- Připojte FTDI adaptér (programátor) k MinimOSD / Micro MinimOSD
- Klikněte na Compile and Upload
 OSD pro ArduPilot Mega - systém pro překrývání telemetrických dat na letovém videu
OSD pro ArduPilot Mega - systém pro překrývání telemetrických dat na letovém videu Proč se můj počítač se systémem Windows nepřipojí k telefonu v režimu hotspotu Wi-Fi?
Proč se můj počítač se systémem Windows nepřipojí k telefonu v režimu hotspotu Wi-Fi? Řešení problému s úpravou jasu na notebooku
Řešení problému s úpravou jasu na notebooku