วิธีเปิดใช้งานการแสดงตำแหน่งที่ถ่ายภาพ (แท็กระบุตำแหน่ง) บนภาพถ่าย ฉันจะทราบได้อย่างไรว่าภาพถ่ายถูกถ่ายที่ไหน? การอ้างอิงมุมมองและความสูง
คำถามที่พบบ่อยนี้ บทความนี้มีจุดมุ่งหมายเพื่อแจ้งให้ผู้อ่านทราบถึงวิธีเปิดใช้งานการแสดงตำแหน่งภาพถ่ายบน Android หรือช่วยกำหนดค่าการแสดงข้อมูลแท็กตำแหน่งบนภาพถ่ายใดๆ ที่ถ่ายจากสมาร์ทโฟน/แท็บเล็ต Android
การเปิดใช้งานตัวเลือกนี้จะช่วยให้คุณเพิ่มพิกัดทางภูมิศาสตร์ของสถานที่ที่คุณถ่ายภาพที่คุณต้องการอัปโหลดไปยัง Vkontakte, Facebook, Instagram หรือเครือข่ายโซเชียลอื่น ๆ...
นี่คือลักษณะของรูปภาพที่อัปโหลดไปยังเครือข่าย "เชื่อมโยง" พร้อมแท็กตำแหน่งและ "อัปโหลด" ไปยัง VK
เพื่อให้สามารถแสดงสถานที่ที่เกิดการถ่ายทำได้ เราจะดำเนินการตามขั้นตอนง่ายๆ เพียงไม่กี่ขั้นตอนในการตั้งค่าระบบ
ในตอนแรก คุณต้องไปที่แอปพลิเคชัน "กล้อง" บนอุปกรณ์เคลื่อนที่ของคุณ และตรวจสอบให้แน่ใจว่าได้เปิดใช้งานฟังก์ชันการเพิ่มพิกัดการถ่ายภาพให้กับภาพถ่ายแล้ว:

ความสนใจ! หากคุณเริ่มอัพโหลดภาพที่ถ่ายหลังจากนี้บนอินเทอร์เน็ต พิกัดการถ่ายภาพจะเปิดเผยต่อสาธารณะ
เราทำการตั้งค่ากล้องเสร็จแล้ว คุณสามารถตรวจสอบการแสดงแท็กตำแหน่งบนภาพถ่ายได้ คุณต้องดูข้อมูลเกี่ยวกับภาพในส่วน "สถานที่ถ่ายภาพ":

หากไม่บรรลุผลตามที่ต้องการเราจะดำเนินการดังต่อไปนี้...
คุณต้องตรวจสอบว่าได้เปิดใช้งานการเข้าถึงตำแหน่งบนอุปกรณ์มือถือ Android ของคุณหรือไม่ ในการดำเนินการนี้ไปที่ "การตั้งค่า" ทั่วไป จากนั้นเลือกของคุณ จากนั้นเรามองหาส่วน "การรักษาความลับ" และไปที่นั่น
ที่นั่นเราจะพบรายการ "การเข้าถึงตำแหน่ง" เราจำเป็นต้องเปิดใช้งาน การทำเช่นนี้จะทำให้แอปพลิเคชันทั้งหมดได้รับข้อมูลเกี่ยวกับตำแหน่งของเราหรือพิกัดทางภูมิศาสตร์ในปัจจุบัน

เรายังต้องเลือกโหมดตำแหน่งหนึ่งในสามโหมด:
- ความแม่นยำสูง. ในกรณีนี้ระบบปฏิบัติการจะใช้ข้อมูลที่มีอยู่ทั้งหมดจากโมดูล GPS โทรศัพท์มือถือและเครือข่าย WLAN เพื่อให้ได้พิกัดที่แม่นยำที่สุด ในกรณีนี้การชาร์จแบตเตอรี่จะถูกใช้ค่อนข้างเร็ว
- ประหยัดพลังงานแบตเตอรี่ ที่นี่สมาร์ทโฟนหรือแท็บเล็ตจะได้รับข้อมูลตำแหน่งตาม WLAN และเครือข่ายมือถือ (ถ้ามี)
- ขึ้นอยู่กับเซ็นเซอร์ของอุปกรณ์ ตัวเลือกหลังเกี่ยวข้องกับการวิเคราะห์ข้อมูลตำแหน่งจากโมดูล GPS เท่านั้น
วิธีที่สองน่าจะเหมาะสมที่สุด แม้ว่ามันอาจจะใช้ไม่ได้กับแท็บเล็ตที่ไม่ได้ออกแบบมาให้ทำงานบนเครือข่ายมือถือ
ระบบสารสนเทศทางภูมิศาสตร์กำลังค่อยๆ กลายเป็นส่วนหนึ่งของชีวิตประจำวัน
อุปกรณ์เคลื่อนที่ส่วนใหญ่ติดตั้งตัวรับสัญญาณ GPS/GLONASS สิ่งนี้ทำให้นักพัฒนาสามารถรับการบันทึกการเดินทางของผู้ใช้ (แทร็ก) เส้นการเดินทางสามารถใช้เพื่อแก้ไขปัญหาต่างๆ ได้ ตั้งแต่การนำทางบนแผนที่และการแจ้งให้เพื่อนทราบเกี่ยวกับสถานที่ ไปจนถึงการวางแผนการจราจรติดขัดและการทำนายสถานการณ์การจราจร
น่าเสียดายที่หากไม่มีการประมวลผลเพิ่มเติม เส้นทางของผู้ใช้จึงไม่มีข้อมูลมากนัก ดังนั้นจึงจำเป็นต้องมีขั้นตอนในการเชื่อมต่อข้อมูลภายนอกและแผนผังแอปพลิเคชันภายใน เพื่อจุดประสงค์นี้ มีอัลกอริธึมการผูกข้อมูลพิเศษ (อัลกอริธึมการจับคู่แผนที่)
บทความนี้เกี่ยวข้องกับอัลกอริทึมในการเชื่อมโยงแทร็กกับกราฟถนนและผลลัพธ์ของแอปพลิเคชันในโครงการ [email protected]
อัลกอริธึมที่เป็นปัญหาจะประมวลผลแทร็กที่เข้ามา โดยรับลำดับของขอบกราฟถนนที่เอาต์พุต ซึ่งด้วยรูปทรงเรขาคณิต จะทำซ้ำข้อมูลอินพุตให้ใกล้เคียงที่สุดเท่าที่จะเป็นไปได้
กราฟถนนเป็นหนึ่งในรากฐานของการประยุกต์ใช้ข้อมูลทางภูมิศาสตร์ ประกอบด้วยข้อมูลทั้งหมดเกี่ยวกับถนน ตั้งแต่ประเภทของพื้นผิวและจำนวนเลนไปจนถึงรูปทรงของถนน มีหลายวิธีในการแสดงกราฟถนนในหน่วยความจำคอมพิวเตอร์
ลองพิจารณาตัวเลือกที่ง่ายที่สุด: กราฟกำกับซึ่งมีจุดตัดและขอบเป็นถนน การลดความซับซ้อนนี้ทำให้ตรวจสอบกฎจราจรได้ยาก แต่อำนวยความสะดวกในการคำนวณเพิ่มเติม ถนนที่มีการจราจรทั้งสองทิศทางในกราฟดังกล่าวจะแสดงด้วยขอบคู่หนึ่ง ขอบเป็นหน่วยของเส้นทางที่แบ่งแยกไม่ได้ อย่างไรก็ตาม ขอบคือการแสดงทางคณิตศาสตร์ของถนน ตำแหน่งที่แท้จริงของถนนบนแผนที่ (ชุดของพิกัดจุดของถนน) จะถูกกำหนดโดยคุณสมบัติแยกต่างหากของขอบกราฟนี้ ซึ่งเราจะเรียกว่าเรขาคณิตของถนน
แทร็กคือลำดับจุดที่มีข้อผิดพลาดบางอย่าง เนื่องจากข้อผิดพลาดนี้ จุดจึงแทบไม่เคยวางอยู่บนขอบของกราฟที่จำเป็นต้องสแนป ตามกฎความถ่อยของข้อมูล GPS ข้อผิดพลาดในการกำหนดตำแหน่งในสนามเปิดน้อยกว่าในใจกลางเมือง กล่าวอีกนัยหนึ่ง จุดที่มาถึงสามารถลงจอดที่ขอบข้างเคียงได้
นี่คือสิ่งที่ทางแยกมอสโกแห่งหนึ่งมองผ่านสายตาของแผนที่: 
และนี่คือวิธีที่ผู้ใช้ของเราเดินทางไปตามการนำทาง: 
ติดตามกระบวนการเชื่อมโยง
หากต้องการเชื่อมโยงจุดติดตามกับกราฟ ในกรณีที่ง่ายที่สุด คุณจะต้องค้นหาขอบที่มีระยะห่างน้อยที่สุดจากขอบหนึ่งไปยังอีกจุดหนึ่ง น่าเสียดายที่ในทางปฏิบัติ (โดยเฉพาะในใจกลางเมือง) เส้นทางที่เชื่อมโยงในลักษณะนี้อาจกลายเป็นชุดของขอบที่ไม่เชื่อมต่อกัน เพื่อปรับปรุงคุณภาพของการเชื่อม เราจะถือว่าแทร็กนั้นเป็นการเคลื่อนไหวที่เป็นระเบียบและมีเป้าหมายของผู้ใช้ไปตามรูปทรงเรขาคณิตของขอบกราฟ นั่นคือเส้นทางทั้งหมดผ่านไปตามขอบที่เชื่อมต่อถึงกัน ในกรณีนี้ แต่ละขอบของเส้นทางอาจมีจุดติดตามหลายจุดหรือไม่มีเลยดังนั้น เนื่องจากเราปฏิเสธที่จะใช้ขอบที่ใกล้กับจุดมากที่สุด เราจึงต้องเลือกการวัดเชิงปริมาณอื่นๆ ที่จะช่วยให้เรากำหนดได้ว่าขอบที่วัดนั้นเหมาะสมสำหรับการยึดอย่างไร
มีหลายปัจจัยที่สามารถใช้ได้:
- ระยะห่างจากจุดหนึ่งถึงเรขาคณิตของขอบกราฟ ประมาณทั้งระยะทางที่สั้นที่สุดและความน่าจะเป็นที่ผู้รับอาจทำผิดพลาดดังกล่าว
- ความบังเอิญของทิศทางการเคลื่อนไหว ประมาณมุมระหว่างเวกเตอร์การเคลื่อนที่ของยานพาหนะกับทิศทางของส่วนเรขาคณิตของขอบที่หักจุดนั้น (การวัดนี้ทนทานต่อข้อผิดพลาดอย่างเป็นระบบของเครื่องรับ GPS แต่อาจมีข้อผิดพลาดแบบสุ่มได้)
- การเปลี่ยนทิศทางการเคลื่อนที่ของรถ ความน่าจะเป็นที่รถจะเลี้ยวออกจากถนนสายหลักโดยทั่วไปจะน้อยกว่าความน่าจะเป็นที่รถจะเคลื่อนไปตามถนนสายหลักต่อไป (ซึ่งจะช่วยลดจำนวนการซ้อมรบ)
- ความเป็นไปได้ทางกายภาพของการย้ายจากขอบหนึ่งไปอีกขอบหนึ่ง (ความสามารถในการเข้าถึงขอบ) ความเพียงพอของความเร็วที่ยานพาหนะต้องเดินทางเพื่อทำการเปลี่ยนแปลงนี้
ในการเชื่อมโยงแทร็กในบทความนี้ เราใช้สูตรการประมาณค่าสำหรับอัลกอริธึมการเชื่อมโยงข้อมูลส่วนเพิ่ม (ตามผลงานของ S. Barcatsoulas)
สูตรนี้ประกอบด้วยสององค์ประกอบหลัก: และ
ส่วนประกอบคำนึงถึงระยะทางถ่วงน้ำหนักจากจุดติดตามถึงขอบ และคำนวณโดยใช้สูตร:
ที่ไหน
เป็นปัจจัยในการขยายขนาด และเป็นระยะทางจากจุด p i ถึงเรขาคณิตขอบ c j
ส่วนประกอบคำนึงถึงมุมระหว่างทิศทางของรูปทรงของสันและทิศทางของแทร็ก:
ที่ไหน
และเป็นปัจจัยในการปรับขนาด และ cos(α i,j) คือมุมระหว่างเรขาคณิตของขอบ i-th ของกราฟกับทิศทางการเคลื่อนที่ตามแนวขอบของแทร็ก
และเป็นพารามิเตอร์ที่มีอิทธิพลต่อความสำคัญของส่วนประกอบต่างๆ สำหรับอัลกอริธึมค่าของพารามิเตอร์เหล่านี้สัมพันธ์กันมีความสำคัญ - นี่เป็นตัวกำหนดว่าปัจจัยใดจะมีน้ำหนักมากกว่าเมื่อเปรียบเทียบ
พารามิเตอร์และมีอิทธิพลต่อความไวต่อการเปลี่ยนแปลงในปัจจัยที่อธิบายไว้
หลังจากคำนวณส่วนประกอบแล้ว ระบบจะคำนวณเมตริกสุดท้ายดังนี้:
ยิ่งตัวเลขในตอนท้ายมากเท่าไร ความเข้ากันระหว่างส่วนของแทร็กกับขอบก็จะยิ่งดีขึ้นเท่านั้น
การมีสูตรสำหรับความน่าจะเป็นของเส้นทางที่ถูกวางในคลังแสงของคุณคุณสามารถอธิบายอัลกอริธึมการเชื่อมโยง:
- เลือกขอบทั้งหมดของกราฟที่มีเรขาคณิตตัดกันบริเวณเดลต้าของจุดแทร็กแรก
- ประเมินขอบที่เลือกทั้งหมดโดยใช้สูตร
- เลือกขอบที่มีคะแนนสูงสุด ทำให้เป็นปัจจุบันและเพิ่มลงในเส้นทางที่เสร็จสิ้น
- หากจุดบนรูปทรงเรขาคณิตของขอบที่อยู่ใกล้กับจุดติดตามมากที่สุดไม่ได้อยู่ที่จุดสิ้นสุดของขอบ ให้เลือกจุดติดตามถัดไป (หากไม่มีคะแนนเพิ่มเติมแสดงว่าการผูกเสร็จสิ้น)
- เลือกขอบกราฟทั้งหมดที่เล็ดลอดออกมาจากขอบปัจจุบันและขอบปัจจุบัน
- ไปที่ 2;
กลยุทธ์ในการพิจารณาประเด็นต่อไป
ข้อได้เปรียบที่ไม่ต้องสงสัยของสูตรที่เลือกคือความสามารถในการประเมินความน่าจะเป็นของการเชื่อมโยงกับกราฟไม่เพียง แต่สำหรับจุดเดียวเท่านั้น แต่ยังรวมไปถึงเส้นทางโดยรวมด้วย ซึ่งสามารถนำมาใช้ในการดำเนินการตามกลยุทธ์โดยคำนึงถึงประเด็นที่ตามมา หากไม่ใช่จุดสุดท้ายของเส้นทางที่กำลังจัดชิดอยู่ในขณะนี้ คุณสามารถคำนวณการประมาณการการเชื่อมโยงสำหรับจุดถัดไปได้ โดยมีเงื่อนไขว่าเส้นทางจะวิ่งไปตามขอบที่เลือก หลังจากนั้น คุณสามารถเปรียบเทียบผลรวมของการประมาณความน่าจะเป็นได้ สิ่งนี้จะช่วยให้คุณหลีกเลี่ยงข้อผิดพลาดที่ทางแยกและทางแยกที่ซับซ้อน เนื่องจากอัลกอริทึมจะเลือกขอบโดยคำนึงถึงการจราจรที่ตามมา
เล็กน้อยเกี่ยวกับประสิทธิภาพ
งานการเชื่อมโยงแทร็กเดียวนั้นไม่แพงมากนัก แต่ในทางปฏิบัติ เป็นเรื่องยากที่ใครจะลิงก์สองแทร็กได้ ตามกฎแล้ว จำเป็นต้องจัดการเพื่อให้ได้คะแนนหลายพันคะแนนต่อวินาที ดังนั้นจึงจำเป็นต้องพบการประนีประนอมระหว่างความเร็วในการประมวลผลและความแม่นยำในการจัดตำแหน่งแทร็ก ในอัลกอริธึมที่เลือก ประสิทธิภาพจะได้รับผลกระทบจากจำนวนขอบที่ประเมินสำหรับแต่ละจุดแทร็กและความลึกของการประเมินคะแนน "จากอนาคต" ดังที่แนวทางปฏิบัติได้แสดงให้เห็นแล้ว ในกรณีส่วนใหญ่ ในการตัดสินใจที่ถูกต้องเกี่ยวกับพฤติกรรมที่ทางแยก ก็เพียงพอที่จะคำนึงถึง 2-3 จุดติดตามที่ตามมาที่จริงแล้วเป็นการยากที่จะเปลี่ยนจำนวนขอบโดยประมาณ เนื่องจากสำหรับการเข้าเล่มคุณภาพสูง หลังจากเลือกขอบแรกแล้ว จำเป็นต้องประเมินขอบขาออกทั้งหมด แต่คุณไม่สามารถพิจารณาตัวเลือกที่มีคะแนนโอกาสต่ำเกินไปได้
ผลลัพธ์
การใช้อัลกอริธึมการเชื่อมโยงช่วยให้โครงการ [email protected] ไม่เพียงเริ่มทำงานกับข้อมูลผู้ใช้มือถือเท่านั้น แต่ยังประสานงานข้อมูลของตัวเองกับระบบที่กำหนดเองได้อย่างรวดเร็วอีกด้วย การใช้ระบบย่อยการเชื่อมโยงใหม่ทำให้คุณสามารถคำนวณแทร็กใหม่ที่มีคะแนนรวมสูงสุด 55,000 จุดบนกราฟของคุณภายในหนึ่งนาทีบนเซิร์ฟเวอร์เดียว ด้วยเหตุนี้ข้อมูลจึงแสดงต่อผู้ใช้โดยเร็วที่สุด อัลกอริธึมแสดงการเชื่อมโยงคุณภาพสูงแม้จะมีหนึ่งจุดแทร็กต่อสามขอบของกราฟภายใน อย่างไรก็ตาม อัลกอริธึมที่อธิบายไว้จะมีประสิทธิภาพสูงสุดเมื่อเชื่อมโยงแทร็กยาวกับจุดหนึ่งหรือสองจุดบนขอบแต่ละด้านของกราฟวรรณกรรมในหัวข้อ
- “การจับคู่แผนที่ บทนำ” ศาสตราจารย์ เดวิด เบิร์นสไตน์ มหาวิทยาลัยเจมส์ เมดิสัน
- “บนแผนที่ข้อมูลการติดตามยานพาหนะที่ตรงกัน” Sotiris Bracatsoulas, Dieter Pfoser Randall Salas Carola Wank VLDB'05
- “การจับคู่แผนที่โดยประมาณโดยคำนึงถึงระยะทาง Frechet” Daniel Chen, Anne Driemel, Leonidas J. Guibas, Andy Nguyen, Carola Wenk สแตนฟอร์ด 2554
Lev Dragunov โปรแกรมเมอร์ [email protected]
“แล้วทำไมถึงจำเป็นล่ะ?
เมื่อเราได้รับ (ไม่ว่าจะจากสแกนเนอร์, จากกล้อง, จากอินเทอร์เน็ต) รูปภาพของการ์ด - นั่นคือทั้งหมด แค่รูปภาพ. เพื่อใช้ในโปรแกรมนำทาง คอมพิวเตอร์จะต้องรู้ (หรือสามารถคำนวณ) พิกัดของแต่ละจุดบนแผนที่นี้ได้ ในการทำเช่นนี้ เขาจำเป็นต้องรู้พารามิเตอร์อย่างน้อยสามตัว - พิกัดของมุมของแผนที่ การฉายภาพ และระบบพิกัดที่รวบรวมแผนที่นี้ ต้องระบุพารามิเตอร์ทั้งหมดเหล่านี้
ลองมาสามตัวอย่าง
1. แผนที่กิโลเมตรภูมิประเทศโซเวียต (L-37-140) ()
แผนที่นี้ยังคงการออกแบบเส้นขอบไว้ เหล่านั้น. พวกเรารู้:
พิกัดมุม:
ระบบพิกัด
การฉายภาพ

2. มีแผนที่ภูมิประเทศแต่ช่องถูกตัดออกไป แต่กิโลเมตร สุทธิหรือพื้นฐาน (กากบาท) จากมัน
ตัวอย่างเช่นเส้นทางครึ่งกิโลเมตรของดินแดนครัสโนดาร์ ก่อนอื่น เราตรวจสอบว่านี่คือตารางที่ตรงกับระบบการตั้งชื่อในตารางที่กำหนดจริงๆ หรือไม่ หรือว่ามันเริ่มต้นในแต่ละแผ่นแผนที่จากขอบของแผ่นงาน ตารางที่ "ถูกต้อง" ในกรณีส่วนใหญ่จะมีการเบี่ยงเบนไปจากแนวตั้ง

ตอนนี้เป็นสิ่งสำคัญสำหรับเราในการกำหนดพิกัดสี่เหลี่ยมของสี่แยกตาราง ในการดำเนินการนี้ เราจะนำแผนที่อื่นที่มีให้เราสำหรับพื้นที่ที่กำหนดซึ่งมีเส้นตาราง แม้กระทั่งระยะทางสองกิโลเมตร มาผูกเธอกันเถอะ ไปที่ ozi เมนู - การตั้งค่า - แท็บ "แผนที่" - ระบบพิกัดทางด้านขวา - เลือกจากรายการแบบเลื่อนลง " กำหนดเอง" - คลิกที่สามเหลี่ยมทางด้านขวาแล้วป้อนการตั้งค่าตามที่ระบุ ตอนนี้เมื่อคุณวางเคอร์เซอร์ของเมาส์ไว้เหนือเส้นเล็งของตารางกิโลเมตรเราจะเห็นตัวเลขอันล้ำค่าที่ต้องป้อนในช่อง "กำหนดเอง" เมื่อเชื่อมโยงแผนที่ของเรา เป็นไปได้มากว่าจะไม่สามารถเลื่อนเคอร์เซอร์ไปที่เป้าเล็งได้อย่างแน่นอน - ไม่มีปัญหา เรารู้ว่าพิกัดสี่เหลี่ยมของเป้าเล็งนั้นมีค่าทวีคูณของ 1,000 - เนื่องจากตารางคือกิโลเมตร กล่าวคือ เราสามารถปัดเศษได้อย่างปลอดภัย .


เราทำซ้ำอย่างน้อยสี่แยกที่อยู่ห่างจากกันมากที่สุด
3. มีแผนที่ (รวมถึงอันเก่า) - ไม่มีตารางกิโลเมตรหรือองศาหรือไม่ตรงกับที่ยอมรับโดยทั่วไปอย่างชัดเจนหรือมีข้อสงสัยร้ายแรงเกี่ยวกับความน่าเชื่อถือหรือมีตารางพารามิเตอร์ ไม่ทราบข้อมูลและการฉายภาพ โดยทั่วไปแล้ว การ์ดใด ๆ แม้จะมาจากซอง Belomor ก็ตาม
เปิดในโปรแกรมแก้ไขกราฟิกที่สะดวก
เรากำหนดว่าแผนที่นี้มีไว้สำหรับพื้นที่ใด
ใน OZ เราจะเปิดแผนที่ (ให้ละเอียดที่สุดเท่าที่จะเป็นไปได้) สำหรับพื้นที่เดียวกัน เราพบวัตถุที่เหมือนกัน - ตามลำดับความแม่นยำที่ลดลง: โบสถ์ เครื่องหมายยกระดับ สะพานรถไฟ ทางแยกของถนน (รวมถึงถนน) จุดบรรจบของแม่น้ำ เราใส่ "จุด" ไว้บนวัตถุเหล่านี้ในโอซี มีความจำเป็นต้องค้นหาวัตถุดังกล่าวอย่างน้อย 4 ชิ้นและไม่เกิน 9 ชิ้น
คลิกเมนู “ไฟล์ - โหลดและปรับเทียบแผนที่” - เลือกแผนที่ของเรา
เราตั้งค่าการฉายภาพเป็นละติจูด\ลองจิจูด ระบบพิกัด - WGS84
ไปที่แท็บ "จุดที่ 1" ทำเครื่องหมายวัตถุที่ต้องการบนแผนที่แล้วคลิกที่ปุ่ม "PT" (หรือ "WP") - เลือกจุดที่เกี่ยวข้องจากรายการแล้วคลิก "ใช้ wp" ไปที่แท็บถัดไปแล้วทำซ้ำกับรายการทั้งหมด
บันทึกไฟล์แผนที่ผลลัพธ์
เพียงเท่านี้ไฟล์ก็แนบมาด้วย ความแม่นยำของวิธีนี้ขึ้นอยู่กับความพร้อมของแผนที่โดยละเอียด วัตถุที่เลือก และจำนวนจุดยึด ในกรณีที่ยาก จะใช้ซอฟต์แวร์อื่นๆ โดยไม่มีข้อจำกัดเกี่ยวกับจำนวนจุดยึดและด้วยการปรับภาพแรสเตอร์ให้ตรง ภาพดาวเทียมความละเอียดสูง ในกรณีนี้ คุณสามารถเชื่อมโยงแม้แต่ภาพถ่ายลูกโลกหรือมุมมองจากหน้าต่างเครื่องบินได้อย่างแม่นยำ โดยไม่ต้องพูดถึงแผนที่ใดๆ เลย
สั่งได้นะคะ
ในส่วน "GPS" - "พิกัด GPS" คุณสามารถติดตามตำแหน่งของโทรศัพท์ทั้งหมดในช่วงเวลาที่เลือก: วัน สัปดาห์ เดือน หรือช่วงเวลาอื่น ๆ และยังตั้งค่าช่วงเวลาระหว่างเวลาที่โทรศัพท์ พิกัด GPS จะถูกบันทึก พิกัดทั้งหมดนี้จะถูกทำเครื่องหมายบนแผนที่โดยตรงและเชื่อมต่อกันด้วยเส้นเพื่อความสะดวกในการมองเห็นเมื่อดูรายงาน
ส่วน "รายการพิกัด GPS" จะแสดงพิกัด (ละติจูด ลองจิจูด และเวลา) ตลอดเวลา ที่ด้านขวาของแต่ละบรรทัดจะมี "ปุ่มสีเขียว" เมื่อคลิก แผนที่ Google Maps จะเปิดขึ้นพร้อมพิกัดตำแหน่งของโทรศัพท์

คุณยังสามารถส่งออกรายการพิกัด GPS เป็นไฟล์ CSV, PDF หรือ Excel บันทึกลงในคอมพิวเตอร์ของคุณและพิมพ์ได้หากจำเป็น
ฟีเจอร์เด็ดสำหรับผู้ปกครอง! คุณสามารถตั้งค่าโซน GPS ที่ไม่ควรให้โทรศัพท์ไป หรือในทางกลับกัน ที่ไม่ควรเข้าไป ตัวอย่างเช่น คุณสามารถตั้งค่าพิกัด GPS ของโรงเรียนที่บุตรหลานของคุณเรียนอยู่ ตั้งค่าประเภทตำแหน่งทางภูมิศาสตร์เป็น "ภายนอก" และตั้งค่ารัศมีของตำแหน่ง GPS (เช่น 5 กิโลเมตร) หากโทรศัพท์ของเด็กอยู่นอกขีดจำกัดที่คุณกำหนดไว้ เช่น เด็กไปที่ไหนสักแห่งหรือโดดเรียน คุณจะได้รับข้อความอีเมลแจ้งให้คุณทราบเกี่ยวกับเรื่องนี้!

ในทำนองเดียวกัน และผลตรงกันข้าม คุณสามารถตั้งค่าโซน GPS (ประเภทการผูก "ภายใน") เมื่อคุณเยี่ยมชม คุณจะได้รับการแจ้งเตือนทางอีเมล

ส่วนนี้จะแสดง เส้นทางที่นำเสนอการเคลื่อนที่ของโทรศัพท์ตามพิกัดที่ได้รับโดยอิงข้อมูลจากเครื่องนำทางรถยนต์จาก Google คุณสามารถเลือกวันที่และเวลาที่สนใจได้ โดยพิกัดที่บันทึกไว้ (ถ้ามี) จะถูกวาดลงบนแผนที่ และ Google จะวางแผนเส้นทางที่เหมาะสมที่สุด

ตำแหน่งโทรศัพท์ตามเสาสัญญาณ
มีสถานการณ์เมื่อปิด GPS บนโทรศัพท์หรือสมาชิกไม่อยู่ในพื้นที่ครอบคลุมของ GPS (หายาก แต่เกิดขึ้น) ในกรณีนี้ข้อมูลเกี่ยวกับตำแหน่งของโทรศัพท์บนเสาของผู้ให้บริการโทรศัพท์มือถือช่วยได้เล็กน้อย
ในส่วน "GPS" - "Towers (BS)" ข้อมูลต่อไปนี้จะปรากฏขึ้น:
IMSI คือตัวระบุสมาชิกเครือข่ายมือถือระหว่างประเทศ IMSI ทำหน้าที่ระบุผู้ใช้บริการเซลลูล่าร์ทั่วโลกโดยไม่ซ้ำกัน เมื่อใช้ IMSI คุณสามารถกำหนดได้ว่าผู้สมัครสมาชิกลงทะเบียนในประเทศใดและกับผู้ให้บริการรายใด - มีบริการออนไลน์หลายอย่างเช่น www.numberingplans.com
ทาวเวอร์ไอดี- แต่ละสถานีฐานของผู้ให้บริการโทรศัพท์มือถือมีหมายเลขประจำตัวของตัวเอง
ชื่อผู้ดำเนินการและรหัสประเทศของโทรศัพท์ของผู้สมัครสมาชิก

หากคุณคลิกที่ปุ่ม "สีเขียว" เพื่อระบุตำแหน่งตามหอคอยบนแผนที่ คุณมักจะเห็นข้อความต่อไปนี้: ไม่พบพิกัด GPS ของ BS
ในรัสเซีย CIS และประเทศอื่น ๆ ทั่วโลกไม่มีสถานีฐานร่วมที่มีพิกัด GPS! ดังนั้นฟีเจอร์นี้จะใช้งานได้เป็นหลักหากโทรศัพท์อยู่ในสหรัฐอเมริกาหรือบางประเทศในยุโรป
ส่วน "GPS" - "จุดเข้าใช้งาน Wi-Fi" จะแสดงเครือข่าย wifi ทั้งหมดที่ใช้บนโทรศัพท์ (สถานะเชื่อมต่อ) หรือตรวจพบภายในพื้นที่ครอบคลุมของเครือข่าย wifi ที่เชื่อมต่อ

หากคุณคลิกที่ปุ่ม "สีเขียว" เพื่อระบุตำแหน่งผ่าน wifi บนแผนที่ คุณจะเห็นข้อความต่อไปนี้: ไม่สามารถระบุพิกัด GPS ของจุดเข้าใช้งาน Wi-Fi ที่ร้องขอได้
ฐานข้อมูลรวมของจุด wifi สาธารณะและความครอบคลุมของ GPS ปัจจุบันมีเฉพาะในสหรัฐอเมริกาและหลายประเทศในยุโรปกลาง หากโทรศัพท์อยู่ในประเทศเหล่านี้ คุณสามารถลองระบุพิกัดได้
บทความนี้จะดูวิธีเพิ่มข้อมูล GPS ลงในแท็ก EXIF ของรูปภาพโดยใช้บันทึกข้อมูลโทรมาตร
Mission Planner มีสองวิธีในการเพิ่มแท็ก GPS จากบันทึกเที่ยวบิน:
- เหตุการณ์ของกล้องจากข้อมูลบันทึกที่จัดเก็บไว้ในหน่วยความจำของตัวควบคุม ArduPilot สามารถลั่นชัตเตอร์ของกล้องได้ในระหว่างภารกิจการบินที่ตั้งโปรแกรมไว้โดยใช้คำสั่ง DO_DIGICAM_CONTROL หรือ DO_SET_CAM_TRIGG_DIST คำสั่งที่ส่งจะถูกบันทึกไว้ในบันทึกและสามารถใช้เพื่อเพิ่มข้อมูลที่แม่นยำเกี่ยวกับพิกัดของภาพเฉพาะได้
- การชดเชยชั่วคราว วิธีนี้ใช้ความแตกต่างของเวลาระหว่างนาฬิกาภายในของกล้องและนาฬิกาของระบบเพื่อพิจารณาว่าแต่ละภาพถูกถ่ายที่ไหนและรับข้อมูล GPS โดยทั่วไป ผู้ใช้จะต้องเลือกออฟเซ็ตที่ยอมรับได้โดยอิสระ วิธีนี้มีความแม่นยำน้อยกว่า และใช้เมื่อไม่มีการเชื่อมต่อระหว่างกล้องกับระบบออโต้ไพลอต
ความคิดเห็น
แม้ว่ากล้องของคุณอาจมี GPS ในตัว แต่การใช้ข้อมูลจากบันทึกการวัดและส่งข้อมูลทางไกลจะมีความแม่นยำมากกว่า
การเพิ่มพิกัด GPS
การดำเนินการเตรียมการ

การดำเนินการต่อไปนี้ขึ้นอยู่กับวิธีที่คุณเลือก - เหตุการณ์ของกล้องหรือการชดเชยเวลา (ข้อความ CAM หรือชดเชยเวลา)
กิจกรรมกล้อง
เหตุการณ์ของกล้องจะถูกบันทึกตามลำดับที่กำหนดโดยภารกิจการบิน เมื่อมีการดำเนินการคำสั่งควบคุมชัตเตอร์ของกล้อง (CAM_TRIGG_DISTANCE, DO_DIGICAM_CONTROL ฯลฯ)
- เลือกวิธีข้อความ CAM
- ป้อนค่าการหน่วงชัตเตอร์ของกล้องเป็นมิลลิวินาที หากคุณทราบ หากไม่ทราบให้ปล่อย 0
- ตรวจสอบว่าการชดเชยบันทึกตรงกับเวอร์ชันบันทึกของคุณ ปกติก็สบายดี ตรวจสอบว่าการชดเชยบันทึกถูกต้องตามเวอร์ชันบันทึกของคุณ (โดยปกติแล้วจะใช้ได้)
- ป้อนข้อมูล FOV หากจำเป็น
- ทำเครื่องหมายที่ช่อง AMSL Alt หากคุณต้องการใช้ความสูงสัมบูรณ์
- คลิกประมวลผลล่วงหน้า
หากการเตรียมการเสร็จสมบูรณ์อย่างถูกต้อง คุณจะเห็นข้อความเสร็จสิ้นที่ส่วนท้ายของพื้นที่ข้อความการปฏิบัติงาน 
ความคิดเห็น
ปัญหาที่พบบ่อยที่สุดในกระบวนการนี้คือความแตกต่างระหว่างจำนวนกิจกรรมของกล้องและจำนวนรูปภาพในโฟลเดอร์ หากยูทิลิตี้ตรวจพบว่ามีความแตกต่างกัน ข้อความแสดงข้อผิดพลาดจะปรากฏขึ้นและการดำเนินการจะถูกยกเลิก
ความแตกต่างในเวลา
คำแนะนำ.
หากคุณยังไม่รู้ มีวิธีที่มีประโยชน์วิธีหนึ่งในการซิงโครไนซ์เวลาของกล้องและเวลาของระบบ

หากการดำเนินการเตรียมการสำเร็จ คุณจะเห็นข้อความเสร็จสิ้น
ความคิดเห็น
ปัญหาที่พบบ่อยที่สุดของวิธีนี้คือความแตกต่างของเวลาที่ไม่ถูกต้อง โปรดจำไว้ว่าผลต่างโดยประมาณคือจุดเริ่มต้นสำหรับการคำนวณทั้งหมด
หากยูทิลิตี้ตรวจไม่พบภาพถ่ายในบันทึกระบบอัตโนมัติ คำเตือนจะปรากฏขึ้นดังภาพด้านล่าง: 
ขั้นตอนสุดท้ายคือ “การตรวจสอบความสะอาด” ซึ่งก็คือการตรวจสอบตำแหน่งที่เสนอของรูปภาพโดยใช้ปุ่ม Location Kml หากตำแหน่งที่แนะนำไม่ถูกต้อง ให้เพิ่มหรือลบสองสามวินาทีจากเวลาออฟเซ็ต และทำซ้ำขั้นตอนล่วงหน้า
การประมวลผลภายหลังขั้นพื้นฐาน
ขั้นตอนต่อไปนี้มีวัตถุประสงค์เพื่อตรวจสอบตำแหน่งที่เสนอของรูปภาพและบันทึกข้อมูล GPS ในข้อมูล EXIF :

คุณสามารถค้นหาภาพถ่ายที่มีแท็ก GPS ได้ในโฟลเดอร์ที่ติดแท็กตำแหน่งภายในโฟลเดอร์ต้นทาง
ภาพรวมอินเทอร์เฟซ
หน้าจอยูทิลิตี Mission Planner Geo Ref Images จะแสดงในรูปด้านล่าง: 
การเลือกไฟล์
การคำนวณความแตกต่างของเวลาและความล่าช้าของชัตเตอร์
ความแตกต่างของเวลาคำนวณโดยการเปรียบเทียบเวลาของภาพถ่ายแรกกับเวลา GPS แรกในบันทึกระบบอัตโนมัติ ทันทีที่ผู้ใช้คลิกปุ่มประมาณค่าชดเชย ยูทิลิตี้จะคำนวณความแตกต่างของเวลาและแสดงผลลัพธ์บนหน้าจอในพื้นที่ข้อความบริการ:
การประมาณค่าชดเชย = 1st_Picture_Time - 1st_GPS_Time_Logged
ความคิดเห็น:
- หากเลือกโหมดเหตุการณ์ของกล้อง ค่าหน่วงชัตเตอร์จะพร้อมสำหรับการแก้ไข โปรดทราบว่าข้อมูล GPS ได้รับการอัปเดตที่อัตรา 5Hz (สำหรับโมดูล 3DR GPS) ดังนั้นจึงถูกบันทึกทุกๆ 200 มิลลิวินาที
- หากความล่าช้าของชัตเตอร์น้อยกว่า 100ms ตำแหน่ง GPS จะถูกนำมาจากเหตุการณ์กล้องปัจจุบัน
- หากความล่าช้ามากกว่า 100ms ตำแหน่ง GPS จะถูกบันทึกในบันทึกก่อนหน้านั้น 200ms
การแก้ไขในบันทึก
พื้นที่นี้อนุญาตให้ผู้ใช้แสดงยูทิลิตีที่ซึ่งข้อมูลเฉพาะสามารถพบได้ในบันทึก มีสามเหตุการณ์ที่ต้องปรับเปลี่ยน
ตัวอย่างวิธีการค้นหาการปรับปรุงในบรรทัดเหตุการณ์
มาดูรูปแบบเส้น GPS ที่ตอนต้นของบันทึกกันดีกว่า:
FMT, 130, 45, GPS, BIHBcLLeeEefI, สถานะ, TimeMS, สัปดาห์, NSats, HDop, La6t, Lng, RelAlt, Alt, Spd, GCrs, VZ, T
ก่อนอื่นคุณต้องค้นหาขนนกตามคำที่กำหนดหน่วยการวัด
ในกรณีของเรา คำที่นิยามหน่วยการวัดคือ BIHBcLLeeEefI ดังนั้นฟิลด์แรกคือสถานะ
จากที่นี่เราได้รับ:
TimeMS = 2 สัปดาห์ = 3 Lat = 6 ...
มุมมองและความสูงมาตรฐาน
ที่นี่ผู้ใช้สามารถระบุขอบเขตการมองเห็น (FOV) และข้อมูลการวางแนวได้ ข้อมูลจะถูกแทรกลงในไฟล์ผลลัพธ์ แต่จะไม่ถูกเก็บไว้ในข้อมูล EXIF
ช่องทำเครื่องหมาย AMSL Alt ช่วยให้คุณสามารถเลือกระดับความสูง AGL หรือระดับความสูง AMSL ได้
ปุ่มการทำงาน
- ประมวลผลล่วงหน้า - เมื่อคุณคลิกปุ่มนี้ โปรแกรมจะพยายามรับและคำนวณตำแหน่งของรูปภาพ
- Location Kml - หลังจากคลิกปุ่มนี้ยูทิลิตี้จะเปิดโปรแกรม Google Earth และแสดงตำแหน่งของภาพถ่ายบนแผนที่เพื่อตรวจสอบตำแหน่ง
- รูปภาพ GeoTag - หากขั้นตอนก่อนหน้านี้สำเร็จ การคลิกปุ่มนี้จะเขียนข้อมูล GPS ลงในแท็ก EXIF ของแต่ละภาพ
คุณสามารถสั่งสร้างออร์โธโฟโต้แมปและแบบจำลองภูมิประเทศ 3 มิติ รวมถึงโฟโตแกรมเมทรีบนเว็บไซต์ของเรา
 ความถี่ของเครื่องตรวจจับโลหะส่งผลต่อการค้นหาสิ่งที่ค้นพบอย่างไร
ความถี่ของเครื่องตรวจจับโลหะส่งผลต่อการค้นหาสิ่งที่ค้นพบอย่างไร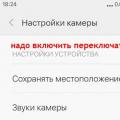 ฉันจะทราบได้อย่างไรว่าภาพถ่ายถูกถ่ายที่ไหน?
ฉันจะทราบได้อย่างไรว่าภาพถ่ายถูกถ่ายที่ไหน? วิธีค้นหาอุกกาบาต อนุญาตให้ค้นหาอุกกาบาต
วิธีค้นหาอุกกาบาต อนุญาตให้ค้นหาอุกกาบาต