Priključitev mini osd na apm pro. OSD za ArduPilot Mega je sistem za prekrivanje telemetričnih podatkov na video posnetku letenja. MinimOSD polne velikosti
Betaflight OSD (Informacije na zaslonu) je integracija informacij iz različnih senzorjev v video tok prek krmilnika letenja. Običajno je OSD dodatna nameščena plošča ali že vgrajen čip v krmilniku letenja. OSD prenaša informacije, kot so napetost baterije, obzorje, nadmorska višina in drugo, na zaslon čelade ali očal.
Z menijem OSD lahko spremenite tudi PID, filtre in druge nastavitve kvadrokopterja. V tem članku bom razložil, kaj je Betaflight OSD, kaj počne in kako ga nastaviti.
Betaflight OSD proti MinimOSD (MWOSD)
Betaflight OSD je enostavnejši in boljši od MinimOSD:
- Prvi je čip, ki je že vgrajen v krmilnik letenja, ni vam treba ničesar spajkati ali povezovati, medtem ko je MinimOSD ločena plošča, na katero morate spajkati vse komponente kvadrokopterja, kot so računalnik, kamera, video oddajnik in tako naprej, odvisno od tega, katere senzorje boste uporabljali več. Poleg tega potrebujete programer za preklop tega modula prek računalnika.
- Prednosti Betaflight OSD: Enostavna nastavitev, saj je vse že integrirano. Konfiguracija poteka v GUI Betaflight. Ni vam treba ničesar spajkati, utripati, ne potrebujete programske opreme in vdelane programske opreme modula drugega proizvajalca.
- Betaflight OSD ne zaseda vrat UART, saj je običajno povezan s SPI BUS.
Čeprav je zdaj MinimOSD že precej dobro razvit in ima tudi grafično lupino in podobne lastnosti.
Kateri krmilniki letenja podpirajo Betaflight OSD
Vsi krmilniki letenja z vgrajenim zaslonskim zaslonom ne podpirajo Betaflight OSD, nekateri potrebujejo dodatno programsko opremo za nastavitev zaslonskega menija.
Trenutno Betaflight OSD podpirajo naslednja letala: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 in Betaflight F3.
Konfiguriranje Betaflight OSD
Najprej se prepričajte, da imate najnovejšo vdelano programsko opremo krmilnika letenja, saj je OSD podprt v vdelani programski opremi Betaflight V3.1 in novejši.
Če ima vaše letalo že vgrajen OSD čip, preprosto priključite kamero in video oddajnik na ustrezna vrata.
Spodaj je primer, kako povezati kamero in oddajnik na krmilnik letenja DYS F4 Pro FC, kamera se poveže z "Vin" in oddajnik z "Vout":
Zdaj se povežite s konfiguratorjem Betaflight, pojdite na zavihek Konfiguracija in vklopi OSD:
Po tem pojdite na zavihek OSD, da začnete nastavljati:
Kaj bi lahko bilo preprostejšega od tega vmesnika? Samo vklopite in izklopite podatke, ki jih želite prikazati.
Video Format – izberite PAL ali NTSC, odvisno od načina, v katerem je vaša FPV kamera. Če ne veste, v katerem načinu je kamera, jo nastavite na AUTO, program bo izbral pravi format za delovanje kamere.
Pomembna informacija: Če je zaslon za predogled v načinu PAL ali AUTO in je vaša kamera v NTSC, bodo podatki, prikazani na dnu zaslona, odrezani, to je značilnost tega formata, ima krajši okvir. Ko uporabljate format AUTO, je najbolje, da podatke, ki jih potrebujete, postavite na sredino zaslona.
V bloku "Alarm" lahko nastavite vrednosti RSSI, kapaciteto baterije, čas pred poletom (štoparica) in nadmorsko višino. Takoj, ko se podatki začnejo ujemati s temi številkami, bodo začeli utripati na zaslonu čelade ali očal.
V oknu za predogled lahko prikazane podatke povlečete, kot želite, vendar jih ne postavljajte preblizu robov, ker se lahko potem odrežejo.
- Prikaz napetosti baterije
- Čas leta (štoparica)
- Ime (lastno)
- Vrednosti plina
- Koliko toka porabi dron
- Koliko mAh kapacitete baterije je izgubljeno
Za aktiviranje menija OSD v očalih ali čeladi potrebujete kombinacijo gibov palice na daljinskem upravljalniku:
- plin v sredini
- zavijanje (zamikanje, vrtenje osi) levo
- nagib (nagib, nagib) naprej
Plin mora biti sredi celotnega uglaševanja!
Za krmarjenje po meniju uporabite desna palica na daljinskem upravljalniku. Za pomikanje - držite gor ali dol, za izbiro elementa menija - držite levo/desno.
Tukaj lahko spreminjate PID-je, filtre, profile itd. Večina teh nastavitev je samoumevna, če ste Betaflight že konfigurirali prek GUI zavihka OSD. Še vedno pa niso vsi elementi tukaj, nekateri so na voljo samo v samem konfiguratorju. Ko opravite nastavitve, pojdite v glavni meni in kliknite " Shrani * Ponovni zagon«.
Kako spremeniti pisavo v Betaflight OSD
Če vam pisava, ki je prikazana na zaslonu, ni všeč, jo lahko preprosto spremenite v konfiguratorju Betaflight, če želite to narediti, pojdite na zavihek OSD in na dnu bo gumb Upravitelj pisav:
Ko izberete novo pisavo, bo v oknu za predogled še vedno prikazana privzeta pisava, vendar boste imeli tisto, ki ste jo izbrali z očali in čelado, zato ne skrbite.
Pogosto zastavljena vprašanja
Zakaj v slušalkah ne vidim podatkov iz zaslonskega menija?
Preverite, ali ste navedli pravilen video format, PAL ali NTSC, poskusite zamenjati. Če še vedno ne deluje, preverite kakovost ožičenja in spajkanja od kamere in oddajnika do OSD modula.
Kako spremeniti ime?
V Betaflight, zavihek konfiguracije, se pomaknite navzdol, tam bo besedilno polje "Craft name", tam lahko vnesete drugo ime.
Za uporabnike APM krmilnikov je bila razvita posebna naprava, Minim OSD, za prekrivanje telemetričnih podatkov. Okrajšava OSD izhaja iz angleškega On Screen Display, kar pomeni prikaz dodatnih informacij na zaslonu operaterja.
Kitajski proizvajalci izdelujejo oba krmilnika letenja - HKPliot Mega, ArduFlyer in krmilnike OSD - MAVLink-OSD.

Navzven se Minim OSD ne razlikuje veliko od MAVLink-OSD, je kot zrcalna kopija plošče, kjer je glavni čip obrnjen za 45 stopinj. Prav tako MAVLink-OSD nima skakalcev za izbiro vrste video signala in združevanje moči digitalnega in analognega dela.
Minim OSD v1.0 je imel težave s pregrevanjem pri uporabi 12-voltnega napajanja kamere, ta težava je bila odpravljena v različici 1.1.
Ker je imel HK konec leta 2013 težave z dostavo, sem naročil MAVLink-OSD pri RCTimerju.

Za programiranje boste zagotovo potrebovali adapter FTDI. Zato sem skupaj z MAVLink-OSD takoj vzel adapter FTDI Tool V1.0 http://www.rctimer.com/product_684.html.

Za konfiguracijo in flash napravo boste potrebovali posebno programsko opremo, imenovano ArduCam-OSD. Prenesite najnovejšo programsko opremo in vdelano programsko opremo ArduCam-OSD tukaj http://code.google.com/p/arducam-osd/downloads/list. Trenutno je trenutna različica 2.0.
Namestite lahko tudi alternativno vdelano programsko opremo, projekt se imenuje minimosd-extra. Informacije se nahajajo tukaj https://code.google.com/p/minimosd-extra/. Za vdelano programsko opremo boste potrebovali svoj pripomoček - MinimOSD-Extra Config Tool. Arhiv praviloma vsebuje pripomoček in strojno programsko opremo. Prenesete ga lahko tukaj https://code.google.com/p/minimosd-extra/downloads/list. Oči pobegnejo od števila različic.
Ploščo in adapter sem zavil v skrčljivo folijo.
Konektor krmilnika za priklop je zelo neprijeten, šest-pinski, brez "nevarne" zaščite. Vsi zatiči se uporabljajo za programiranje, vendar se za povezavo s krmilnikom letenja uporabljajo samo 4 nožice.
Za programiranje je še vedno najti mini-USB kabel.

Kar zadeva štiripinski konektor, je tukaj vse bolj zapleteno. Če zmešate in povežete napačno, se lahko pojavi dim.
OSD poveže z krmilnikom letenja v priključku za telemetrijo. Žica za OSD mora biti povezana s centralnimi zatiči: GND, VCC, RX, TX.
Če uporabljamo radijski modem, ga povežemo vzporedno. Zato sem moral spajkati Y-kabel.

Na fotografiji je prikazana žica za krmilnik AIOP, v katerem je na en konektor priključen tudi GPS.
Nisem odstranil žice, ki je vodila do TX mojega OSD-ja, da bi bila univerzalna, nikoli ne veš, kje bom še uporabljal to žico.
Upoštevati je treba, da če na analogni del plošče ne uporabite 5 voltov, bo plošča tiha.

Nekateri viri ponujajo preoblikovanje plošče in napajanje analognega dela iz digitalnega, vendar tega nisem storil, saj obstaja mnenje, da se lahko pojavijo motnje.
Za tiste, ki se odločijo za povezavo iz enega vira napajanja, bo vezje, kot je prikazano na fotografiji.

Trenutno imam analogni del, ki ga poganja video oddajnik, o katerem sem že govoril v prejšnjem članku.
ArduCAM OSD Config
Začnimo z domačim pripomočkom ArduCAM OSD Config. Trenutno je aktualna različica 2.1.2.0.
Od glavnih elementov je treba poudariti programski meni in tri zavihke, ki preklapljajo med naslednjimi zasloni: Config, Panel 1, Panel 2.
Konfiguracija, tukaj je vse zelo jasno.
Najprej izberite številko vrat in kliknite gumb Read From OSD.

Upoštevati je treba, da se vrsta video signala NTSC - PAL preklaplja v meniju programa Video Mode. Element menija Datoteka vam omogoča, da shranite in naložite svoje nastavitve ali pojdite na privzete nastavitve. V meniju Možnosti lahko omogočite mrežni način za Panel1 in 2, posodobite vdelano programsko opremo, izberete sliko ozadja, uporabite dnevnik za nastavitve, dodate svoje pisave.

Plošča 1 se uporablja za prilagajanje informacij, prikazanih na videoposnetku za prvi zaslon. Preklapljanje kanalov je nastavljeno na brezplačen radijski nadzorni kanal OSD Preklopni kanal.

V skladu s tem smo za drugi zaslon nastavili Panel 2.

Vdelana programska oprema se posodobi z istim pripomočkom.

MinimOSD-Extra Config Tool
Ko odpremo program MinimOSD-Extra Config Tool, se zdi, da smo pomešali mape in znova zagnali ArduCAM OSD Config. To je prvi vtis, pravzaprav je zelo podoben, vendar je nastavitev več.
Oglejmo si glavne razlike.
Prva točka je izbira tipa modela: Letalo, Copter.
Dodana je možnost za samodejno preklop zaslona na tistega, ki je določen v spustnem meniju (Samodejno preklapljanje plošče za opozorila), ko se pojavi opozorilo. To je potrebno, ko so na primer vse informacije odstranjene na drugem zaslonu, tako da nič ne ovira pogleda.
Izberete lahko prikaz baterije v odstotkih ali mA.
In še en Pokaži znak pred blokom vrednosti, ki je odgovoren za prikaz ikon pred vrednostmi.

Prvi zaslon

Drugi zaslon

rezultate
Najprej sem namestil vdelano programsko opremo prek ArduCAM OSD Config.

Načeloma je bilo vse normalno, vendar je bil moteč en odtenek, ki se je izrazil v naslednjem.
Po priključitvi naprave sem na zaslonu opazil, da so nekateri podatki na levi strani odrezani. Ikone pred vrednostmi parametrov napol manjkajo. Odločil sem se, da poskusim spremeniti vrsto signala v PAL, posledično se je še poslabšalo, odrezalo je zgornji in spodnji del zaslona, zato sem ga vrnil na NTSC. Naj bo le na eni strani in ne na treh, še posebej, ker lahko poskusite popraviti to pomanjkljivost na levi.

Premaknjene informacije blokirajo en znak v desno.

Operacija je bila neboleča, prostora za to je bilo dovolj.


Kot rezultat, se je vse izšlo, ikone so zdaj v celoti vidne, informacije so popolnoma berljive na zaslonu.
Toda vdelana programska oprema MinimOSD-Extra 2.4 R726 je bila nameščena, vendar je na zaslonu začela oddajati nekakšno sramoto.

Slika je postala neberljiva, informacije so bile zmedene na celotnem zaslonu.

Prenesena prejšnja različica 2.2.

S to različico vdelane programske opreme so se informacije začele prikazovati brez popačenja.

sklepi
Kompaktna in poceni naprava. Precej univerzalen, uporablja se tako z originalnimi ploščami ArduPilot Mega (APM) in njegovimi kloni HKPILOT Mega, ArduFlyer, kot tudi s krmilniki serije AIO (All-In-One) z vdelano programsko opremo MPNG ali MultyWii. Na forumih so informacije o povezovanju s krmilniki DJI Naza, vendar to zahteva delo s spajkalnikom v rokah.
Edini minus je šestpinski konektor na plošči, v katerega priključimo kabel s štiripinskim konektorjem. Različic je lahko veliko, če se zmotite, lahko ploščo zažgete, saj ni zaščite.
Ne pozabite na napajanje digitalnih in analognih delov plošče, sicer ne bo delovalo. Kateri način prehrane izbrati, bo tukaj nekomu bolj priročno.
Seveda mi je bil MinimOSD-Extra bolj všeč, saj omogoča izvajanje dodatnih nastavitev, ki niso v ArduCam OSD Config. Toda kot se je izkazalo, moramo še vedno najti stabilno različico. Naletel sem na dejstvo, da je pri nekaterih firmware-ih pokvarjen izhod informacij preko videa. Ne prvič mi je uspelo najti delujočo različico. Zato mi nekatere možnosti MinimOSD-Extra niso bile na voljo. Žal je to minus mnogih odprtokodnih projektov.
Zato velja omeniti, da je ArduCam-OSD Config bolj stabilen in preizkušen.
Krmilnik izvaja kakovostno prekrivanje informacij na videu, besedilo je videti precej jasno in lahko berljivo na majhnem zaslonu. Nisem opazil upočasnitve prikaza informacij.
OSD je uporaben pripomoček za letenje s kamero. V tem članku si bomo ogledali, kaj je OSD, kako se povezuje z našo FPV opremo in končno pregled zmogljivosti različnih OSD-jev.
Če imate kakršna koli vprašanja - sporočite mi v komentarjih.
Kaj je OSD in kakšne so njegove prednosti
OSD je kratica za On Screen Display – t.j. prikaz na zaslonu ali meni na zaslonu (tj. na vrhu glavne slike, običajno s fotoaparata, se prikažejo nekatere dodatne informacije, večinoma besedilo). V našem hobiju je OSD majhno tiskano vezje, ki prikazuje podatke o letu na vrhu slike vaše kamere. Tako lahko spremljate stanje kvadrokopterja neposredno med letom na kameri.
Če imate prave senzorje in zaslonski zaslon, boste lahko videli podatke o letu kar v svojih očalih ali monitorju, kot so napetost baterije, kolikšen tok porabijo vaši motorji in druga elektronika, vaša nadmorska višina, koordinate GPS itd.
Tako je letenje okoli kamere varnejše, saj lahko vidite nivo baterije, veste, kdaj pristati, kako daleč ste že leteli in v katero smer se morate vrniti.
OSD ni potreben za letenje kamere, vendar je, kot vidite, izjemno uporaben. Večina ljudi kupi vsaj SimpleOSD, da vidi napetost na bateriji, to je potrebno, da se izognemo prekomernemu praznjenju (če letiš daleč, potem sirene, ki signalizira nizko baterijo, ni slišati).
Vrste podatkov, ki jih je mogoče prikazati z OSD
Slika prikazuje najpogosteje uporabljen niz podatkov pri letenju okoli kamere.

Časovnik
Odvisno od vrste vašega OSD-ja je to lahko čas leta (od trenutka, ko vzletite) ali čas delovanja (od trenutka, ko je kvadrokopter vklopljen). Nekateri zaslonski zasloni vam omogočajo prikaz več vrst časovnikov.
Napetost baterije
Skoraj vsi zaslonski zasloni vam omogočajo prikaz napetosti. To je najpomembnejša informacija pri letenju okoli kamere, tako da veste, kdaj pristati (običajno pristanem, ko napetost pade na 3,5 V na celico)
Trenutna poraba
Če imate senzor toka, lahko spremljate, koliko toka črpajo motorji in koliko mAh vaše baterije je že porabljeno.
RSSI
RSSI je pokazatelj moči signala vašega oddajnika, običajno prikazan v odstotkih. Dlje kot letite, šibkejši bo signal, ti podatki vam bodo pomagali vedeti, na kateri točki se morate obrniti nazaj.
RSSI je izhod iz vašega krmilnega sprejemnika, običajno v formatu PWM, zato boste morda potrebovali D/A pretvornik in nizkoprepustni filter.
Opozorila
Nekateri zaslonski zasloni lahko prikazujejo različne alarme, opozorila, za katere morate kot uporabnik nastaviti mejne vrednosti za parametre, kot so napetost baterije, vrednost RSSI itd.
Letalski način
Prikazuje trenutni način letenja vašega letala. Te informacije bodo koristne, če pogosto preklapljate med različnimi načini, kot so Loiter (lebdenje na mestu), ročni način, samonivelirni način, tako da se vam ni treba spraševati, v katerem načinu je trenutno letalo. Če želite to narediti, boste morali krmilnik letenja povezati z OSD.
GPS
Z uporabo GPS ne dobite le koordinat drona, temveč tudi njegovo nadmorsko višino (čeprav bo natančnejši kot z barometrom ali sonarjem). Zahvaljujoč pametnim izračunom lahko vidimo hitrost nad tlemi, razdaljo do izhodišča in njene koordinate (grafični prikaz smeri proti izhodišču je zelo uporabna stvar, sploh če se malo izgubiš).
Obzorje
Virtualno obzorje vam bo pomagalo razumeti, kako je dron nagnjen v vesolju.
OSD povezava v kameri, video oddajniku in krmilniku letenja
Vse OSD bi razdelil na 3 vrste:
- Samostojni zaslonski zasloni
- OSD je odvisen od krmilnika letenja
- hibridni
Samostojni zaslonski zasloni se povezujejo samo s kamero in video oddajnikom in ne komunicirajo s krmilnikom letenja. Včasih jih je mogoče povezati neposredno z GPS-om ali drugimi senzorji, da bi imeli dostop do njihovih odčitkov. Dober primer te vrste je Skylark OSD (+GPS in senzor toka) in Super Simple OSD.
OSD, odvisni od krmilnika, se zanašajo samo na podatke iz krmilnika leta, običajno prek serijskih vrat (RX/TX). OSD sam ne naredi nič drugega kot prikaže te podatke. MinimOSD iz Hobbykinga je dober primer te vrste OSD (če je različica nespremenjena, kot je KV mod). Prednost te vrste je, da OSD uporablja podatke, ki jih prejme od senzorjev krmilnika, kar pomeni, da krmilnik sam uporablja te podatke za poenostavitev upravljanja in nadzora. Medtem ko v primeru samostojnih zaslonskih nastavitev krmilnik letenja ne more uporabiti podatkov iz senzorjev, povezanih z zaslonskim zaslonom.
Hibridni tip OSD se lahko uporablja kot samostojen zaslonski zaslon (z omejeno funkcionalnostjo), lahko pa se poveže tudi s krmilnikom, da poveča nabor prikazanih podatkov o letu. MinimOSD z modom KV je odličen primer te vrste OSD: če ga uporabljate samostojno, lahko vidite samo RSSI in napetost, ko pa je povezan s krmilnikom z GPS-om, boste videli trenutni način letenja, koordinate GPS, nadmorsko višino , itd
Najlažja povezava - samostojen zaslonski zaslon
Kot primer povežite Hobbyking Super Simple OSD na FPV kamero, video oddajnik in 3S litijevo baterijo.

Teoretično lahko spremljate napetost na drugi bateriji prek vrat Bat2.
Povezovanje hibridnih OSD-jev
Opažam, da v tem primeru OSD neodvisno meri napetost baterije in nivo RSSI (čeprav ju je mogoče povezati s krmilnikom in prenašati podatke preko njegovih serijskih vrat, obe možnosti delujeta dobro).
Če želite prikazati koordinate, smer do začetne točke in razdaljo do nje, morate GPS povezati z Naze32.
OSD, ki sem ga že uporabljal
MinimOSD s KV Team Mod
MinimOSD je trenutno moj najljubši OSD in ga uporabljam. S prenosom ustrezne vdelane programske opreme lahko MinimOSD uporabljate s ploščami Naze32, CC3D, Multiwii, APM in PixHawk. To je zelo dobra plošča, ki lahko prikaže vse informacije o letu, ki so na voljo s senzorji.

MinimOSD lahko prikaže vse informacije, ki so na voljo od senzorjev
Hobbyking in Banggood prodajata MinimOSD, vendar imata originalno različico, ki nima dodatnih zatičev na strani za RSSI, napetost baterije itd. Ne bi jih kontaktiral, če je mogoče kupiti MinimOSD KV Mod.
MinimOSD Micro

Popolnoma enak zaslonski zaslon, kot je opisano zgoraj, razlika je v manjši velikosti. Poleg tega na njem ni pretvornika 12V -> 5V, vendar to ni pomembno, ker. tako ali tako nihče ne uporablja tega pretvornika zaradi pregrevanja plošče.
MožganiFPV
Tudi ta tabla prikazuje karkoli, z ustreznimi senzorji.

V članku bomo razmislili o povezovanju, utripanju in konfiguraciji MinimOSD. Odgovorili bomo tudi na vprašanje, kaj storiti - če je šlo kaj narobe in kaj storiti - da se ne bi vse končalo žalostno.
« Petka - naprave!?!? -Tristo!!! -Koliko je tristo??? -Kaj pa inštrumenti?
MinimOSD. Poceni in zelo uporaben šal. Omogoča vam, da vidite, kaj se zdaj dogaja s helikopterjem - trenutno napetost, koliko amperov je bilo porabljenih, koliko satelitov za globalno pozicioniranje je zajetih, in vam tudi ne bo dovolil, da se "izgubite" na nebu. Nemogoče se je izgubiti na nebu, pravite? In tukaj je zelo možno. Začenši od elementarnega "vzletelo je, oh, ampak vse je drugače od zgoraj ... oh, kje sem jaz?", Konča s težkimi pogoji letenja, na primer letenje v temi ali padavinah, ali po nesreči priletel v oblak, kot v spodnjem videu:
V četrti minuti je le reševalna puščica »domov« kazala, kam leteti.
V redu, v redu, dovolj besedila, vadimo!
PRIPRAVA.
Torej, sami ste naročili MinimOSD. Na Banggoodu ali Hobbykingu ali RCTimerju - ne glede na to, kje, in dobil nekaj takega:
Roke me srbijo, da ga povežem z delovno postajo in vidim, kaj kaže. Ni pa vam treba narediti vsega naenkrat! To je polno naročila novega OSD - in to je izgubljen čas (kar je glavna stvar) in seveda izgubljen denar.
Na plošči sta dva velika čipa: ATMEGA328P in MAX7456. Prvo mikrovezje (natančneje mikrokrmilnik) je odgovorno za komunikacijo s krmilnikom letenja ("digitalni del" plošče). In drugi je enokanalni enobarvni zaslonski zaslon (OnScreenDisplay - meni na zaslonu) podjetja Maxim, poimenujmo ga "analogni del" plošče. Torej, ta MAX7456 je precej muhasto mikrovezje. Ne mara pregrevanja, ne mara ostrih skokov med "digitalnim" tlem in "analognim" - skratka, zlahka gori. In na srečo leni Kitajci NIKOLI ne spajkajo navadnega hladilnega telesa mikrovezja (na "trebuhu"). Če uporabljate robček v obliki, v kateri je prišel - MAX bo zagorel - 80% garancija. Da se to ne bi zgodilo, spajkamo tri luknje, ki so označene na spodnji fotografiji.

Če želite to narediti, v luknjo vstavite tanko spajko (premera 1 mm, zaželeno je, da je takoj s fluksom) in jo segrejte s spajkalnikom:

In tukaj je rezultat (spajkanje ni zelo dobro, a kolikor lahko - bolje vam bo!)

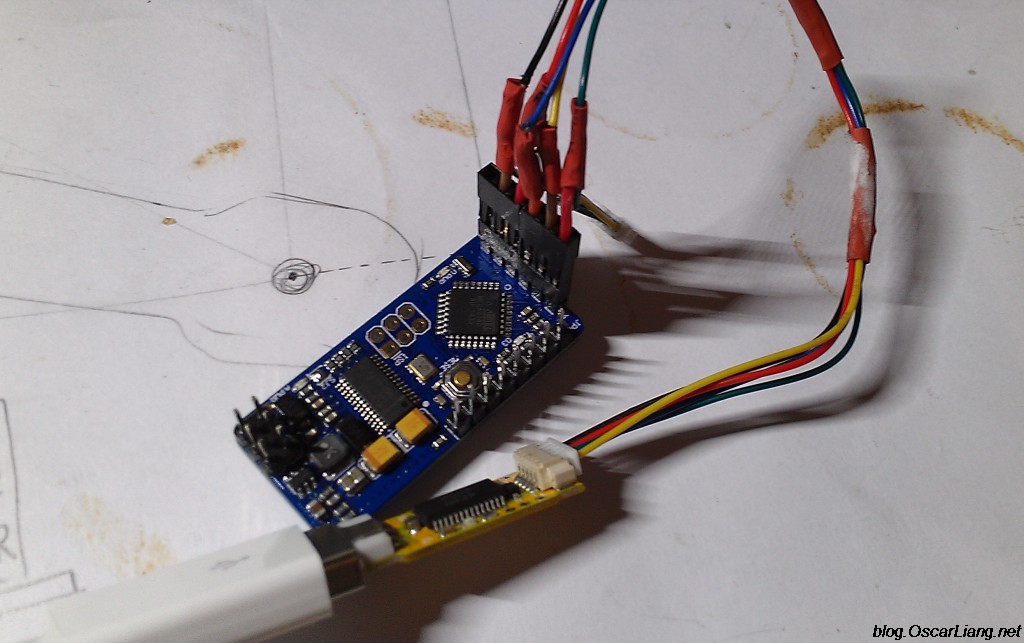
Zdaj o značilnostih povezave. Pozorni ljudje so opazili, da sem skakalec spajkal od zgoraj. Obstaja več načinov za povezavo MinimOSD in veliko kopij je pokvarjenih, kar je boljše ali pravilnejše ali povzroča manj motenj. Uporabljam način povezave s kombinacijo digitalne in analogne ozemljitve ter napajalnika iz 5 voltov iz "digitalnega" dela. Ker minimOSD porabi precej, je bolje, da ploščo napajate iz ločenega vira napajanja. Izgleda skoraj takole:

Se pravi, na vrhu sem spajkal skakalec in tako združil zemlje. In še vedno morate spustiti en skakalec na "sprednjo" stran plošče.

POVEZAVA IN NASTAVITEV
No, vse je spajkano, zdaj je naš šal pripravljen za priključitev na računalnik. Za to potrebujemo adapter FTDI (na primer vklopljen ali kateri koli drug USB-UART TTL adapter).

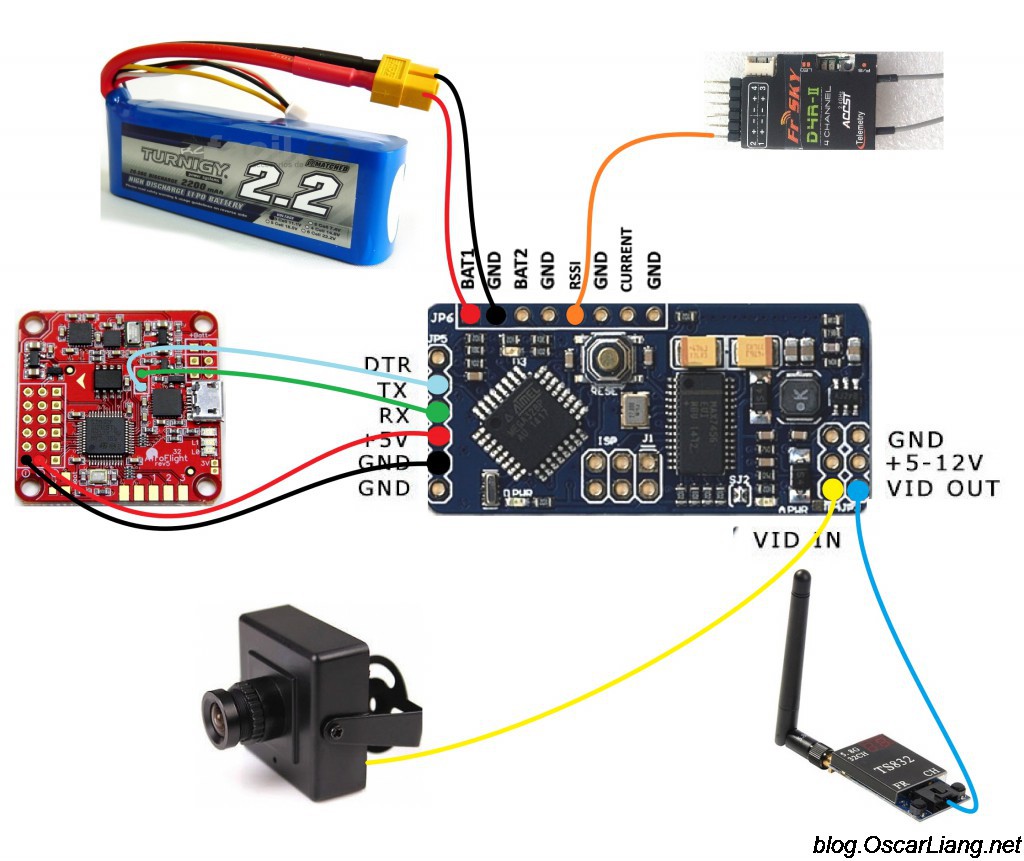
Povezujemo s 5 žicami, povezovalni diagram je naslednji: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (na strani OSD) - priključimo jih na adapter FTDI 1. DTR , 2. Rxi, 3 .Txo, 4.VCC, 5.GND. Tukaj je slika, kako je to povezano zame:

Če ni jasno, si oglejte ta videoposnetek, še posebej pozorno pri 1:03
Zdaj pa kaj prenesti in kako konfigurirati. Za začetek bom rekel, da je za helikopterje in letala vdelana programska oprema drugačna. Obstaja tudi vdelana programska oprema za Multivia (kvTeam), obstajajo pa tudi ločeni modi - od samostojnega dela (brez krmilnika letenja) do povezovanja celo z Nazo.
Ampak tukaj razmišljamo o "klasičnem" primeru - helikopterju na krmilniku AWP. uradna stran projekta. stran za prenos (za helikopter pod AWP morate naložiti ExtraCopter). Ampak to so stare različice, ljudje so se od takrat precej spremenili. Sodobna vdelana programska oprema je v . V času tega pisanja je to vdelana programska oprema R800, leži (uporabnik MinimOSD_Extra, geslo Top_Secret), na Ya.Disk.
Arhiv vsebuje samo vdelano programsko opremo (HEX - datoteka), datoteko s pisavami (mcm - datoteka) in sam program (OSD_Config.exe).
Najprej pojdimo v upravitelj naprav in preverimo hitrost vrat FTDI (nastavili bomo 115200):

Zaženemo program OSD_Config.exe, izberemo vrata, pritisnemo gumb »Read From OSD«, mora biti sporočilo o uspešnem branju. Ker ni znano, katera vdelana programska oprema je naložena iz tovarne, da v prihodnosti ne bi imeli težav, jo bomo napolnili s svežo. Če želite to narediti, kliknite meni Možnosti> Posodobi vdelano programsko opremo

izberite datoteko in jo naložite.
Prejeli bomo sporočilo o uspešni vdelani programski opremi

Nato bo krmilnik inicializiral in naložil nastavitve v program, o čemer bo poročal

Čas je, da prenesete datoteko pisave, ki se ujema z vdelano programsko opremo (če tega ne storite, se lahko izkaže, da je videz OSD zelo smešen ali celo neberljiv). Pritisnite meni Option>Update Charset,

izberite datoteko MCM in jo naložite

Čakamo na pripravljenost

Po prelivanju se krmilnik ponovno inicializira.



Naj malo razložim:
RSSI kanal - pretvarjanje RSSI v odstotke. Kjer je 5 voltov 255 (največ v oktalnem). In sprejemnik FRsky ima največji signal 3,3 volta. Če označite potrditveno polje RSSI omogoči RAW, bomo na zaslonu FPV videli "neobdelane" podatke. Prav njih lahko zapeljemo v nastavitve. Lahko pa samo vnesete moje vrednosti.
Še ena subtilnost - preklapljanje zaslonov OSD. Kot lahko vidite, obstajata dve plošči za podatke. Preklopimo lahko na tri možnosti prikaza - screen1 (Panel1), screen2 (Panel2), prazen zaslon brez podatkov (Disabled). Za to se moramo najprej odločiti, kako natančno bomo preklapljali med zasloni. Na primer, če preklapljamo med zasloni z vrtljivim ali tripozicijskim preklopnim stikalom, bomo imeli tri razpone vrednosti po kanalih (Panel1: 0-1233, Panel2: 1233-1467, Onemogočeno: 1467- 1701). V tem primeru mora biti stikalo za preklop vrtenja izklopljeno. In če preklapljamo s preprostim dvopozicijskim preklopnim stikalom, je smiselno omogočiti Rotation Switching. Hkrati, ko je preklopno stikalo vklopljeno, bomo izmenično preklapljali zaslone (Panel1 -> Panel2 -> Disabled -> Panel1 ......), če je preklopno stikalo izklopljeno, bo preklapljanje med zasloni ustavi. Kateri kanal bo preklopil zaslone, je določeno na spustnem seznamu z naslovom OSD Preklopni kanal. Postavil sem ga na kanal številka 6. Obstaja pa še ena zaseda, ki jo nekateri (vključno z mano) sprva zmedejo - Opozorilo Auto Panel Switch. Ta seznam določa, na kateri zaslon se preklopi, ko se pojavi katero koli od prej definiranih opozoril. Zdi se, da je vse jasno. Sami letite, nekaj se je zgodilo med letom, zaslonski meni se je preklopil na zaslon, ki ste ga vprašali. Toda tukaj je vprašanje - nastavimo preklapljanje med zasloni, praviloma je to konfigurirano doma, helikopter ne leti, želimo preveriti - zasloni se ne preklapljajo! A ker doma običajno ni GPS Fixa – skratka, opozorilo je delovalo! Torej preklapljanje med zasloni "ne deluje" ... 🙂
Ne vem, ali je treba ostale parametre pojasniti, morda bom kasneje dopolnil članek.
Lahko samo rečem, da pri nastavljanju glavnega zaslona ne smete potiskati vsega naenkrat tja. Bolje je, da najprej izklopite vse (v stolpcu na levi) in šele nato vklopite samo tisto, kar potrebujete, in ga takoj postavite v desni del zaslona. Priporočam, da na robovih zaslona pustite prazen prostor, ki ga lahko odrežete z monitorjem ali DVR s pisalom ali očali.
Nato še ena pomembna točka - Nastavitev zaslonskega menija v načrtovalniku misij. Recimo, da ste vse povezali, kot je treba, vendar namesto smešnih številk in umetnega obzorja vidimo dolgočasen napis »Brez podatkov Mavlink«. To pomeni, da OSD deluje, z veseljem bi vam kaj pokazal, vendar ne prejema podatkov. To pomeni, da nobeni podatki iz delovne postaje ne pridejo na pin Rx. Prvi možni razlog je, da so žice pri povezovanju pomešane. Preverite, ali je Rx iz OSD-ja povezan z vrati Tx na delovni postaji. Drugi možni razlog je, da sam krmilnik ni konfiguriran za pošiljanje podatkov v vrata COM. Če želite to narediti, morate v preprostem primeru na zavihku ZAČETNA NASTAVITEV > Izbirna strojna oprema > OSD pritisniti gumb Omogoči telemetrijo. Hkrati MP samodejno konfigurira številne parametre, ki vam omogočajo pošiljanje podatkov na OSD. Če ta čarobni gumb ni pomagal, boste morali vse nastaviti z majhnimi rokami. Če želite to narediti, pojdite na zavihek CONFIG / TUNING > Celoten seznam parametrov, se pomaknite navzdol do črke S in preverite (ali popravite) vrednosti parametrov:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POZICIJA = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Če podatki še vedno ne prihajajo in še vedno vidimo dolgočasen napis »No Mavlink Data«, potem morate preveriti, ali je OSD priključen na prava vrata (članek govori o UART0), morda boste potrebovali parametre SR1 ( enako kot je opisano zgoraj, samo za vrata UART1). Možno je tudi, da vam OSD ne deluje skupaj s telemetričnim modemom - v tem primeru boste morda morali priključiti ali, nasprotno, odklopiti žico Tx na OSD. Obstaja tudi napaka, da OSD ne deluje, ko je kabel USB priključen na računalnik. Ali pa si morda samo zmotil žice ...
Bom delil še eno fotografijo. Na mojem krmilniku so zaradi sesutja nehala delovati glavna vrata za telemetrijo, pravkar sem spajkal na UART0. In potem mi je bila ta povezava všeč.

Tukaj sem napajal neposredno iz krmilnika. Je pa OBVEZNO preveriti, kaj je ostalo od 5 voltov do samega krmilnika. V mojem primeru se sam krmilnik napaja iz sprejemnika, tam pa je nastavljen na malo višje od 5 voltov, tako da je bilo ob upoštevanju sprejemnika in minimOSD za sam APM strogo 5 voltov.
Dotakniti se je treba še ene točke. Če OSD utripa napačno, se pojavi napaka " ni uspelo govoriti z zagonskim programom". Ta napaka je dobesedno prevedena kot "napaka pri pogovoru z zagonskim programom". Pojavi se lahko v primeru zapletenih žic ali ko se zagonski nalagalnik zruši. Če je v primeru žic vse jasno (glejte zgoraj, kako pravilno povezati), potem je v primeru zagonskega nalagalnika potreben postopek za obnovitev mikrokrmilnika.
Obnovitev zagonskega nalagalnika.
Za to potrebujemo vsaj programerja. Bolj priročno je uporabljati USBasp.

morda vam bo všeč ta adapter (ISP10<>ISP6)
 ali ta kabel (na voljo na)
ali ta kabel (na voljo na)

Na splošno se tako ali drugače na ATMega328P povežemo s programatorjem.
Razporeditev priključka ISP na plošči OSD je splošno sprejeta. Običajno je prvi stik kvadraten. Če ne, je najbolje, da preverite tako, da pogledate Vcc in GND.

V programatorju so zatiči običajno podpisani, če ne, potem običajno izgleda tako:

Če želite to narediti, najprej izberite vrsto programatorja

Nato izberite vrsto plošče

In tip mikrokrmilnika


in počakajte približno minuto, da se zagonski nalagalnik naloži (poglejte zeleno statusno vrstico na dnu)
 Dokler se ne prikaže sporočilo, da je bil zagonski nalagalnik uspešno utripan
Dokler se ne prikaže sporočilo, da je bil zagonski nalagalnik uspešno utripan

(na spodnje napake nismo pozorni, posodobiti morate vdelano programsko opremo programatorja)
Naprej - pojdite na OSD_Config.exe, izpolnite vdelano programsko opremo in pisave, kot je že opisano. Morda boste morali dvakrat naložiti strojno programsko opremo (za pravilno inicializacijo krmilnika je potreben še en čas po nalaganju zagonskega nalagalnika).
No, to je približno vse. Nenadoma, kdor ne ve, je več. Če tukaj kaj ni jasno, si to lahko "v živo" ogledate tam.
Vso srečo pri namestitvi OSD na vaš quad!
vedno tvoj, Ganiev Timur - 5yoda5.
5yoda5#apmcopter
Posodobitev 11. 11. 2015:»No, vse je spajkano, zdaj je naš šal pripravljen za priključitev na računalnik. Za to potrebujemo adapter FTDI (na primer na RCTimerju ali katerem koli drugem adapterju USB-UART TTL).
Posodobitev 3. 11. 2016: Dodane so slike pinout ponudnika internetnih storitev.
Če na strani najdete napako, kliknite Shift+Enter ali nas obvestiti.
V tem priročniku si bomo ogledali tako običajno kot Micro različico, kako nastaviti in uporabljati strojno programsko opremo MW-OSD ter kako se povezati z Naze32 in sprejemnikom.
Kaj je MinimOSD in Micro MinimOSD
Čeprav je nastavitev veliko bolj zapletena kot pri drugih OSD-jih, kot sta Super Simple OSD ali E-OSD, ki jih priključim in takoj začnem delovati, ima MinimOSD številne prednosti in videz zaslona je popolnoma prilagodljiv.
Najbolj uporabne funkcije: prikaz GPS koordinat, prilagodljive sloge in pisave, z uporabo zaslonskega menija lahko spreminjate koeficiente PID krmilnikov, stopnje itd. Primer, kaj se lahko prikaže na zaslonu.
Nastavitev PID koeficientov prek menija:

Dimenzije, teža, pinout, spajkanje za zmanjšanje dimenzij
MinimOSD polne velikosti
Ta OSD obstaja že vrsto let. Prednost te različice (MinimOSD s KV Mod) je, da ima ob strani zatiče za priklop tokovnega senzorja, RSSI, napetostnega senzorja itd. Prej smo morali sami zelo previdno spajkati žice neposredno na noge čipa, kar je bilo zelo težko. Ta različica je zelo olajšala življenje. Kupil sem si eno takšno ploščo (različica 2)

Dimenzije MinimOSD s KV Mod V2: širina 21 mm, dolžina: 43 mm, teža: 5,5 g (vključno s priključki).
Micro MinimOSD
Presenečen sem nad mikro velikostjo tega zaslonskega menija, vendar ima vse funkcije različice polne velikosti. Poleg možnosti napajanja z 12V, ki ga v stari različici skoraj nikoli niso uporabljali, zaradi pregrevanja plošče. Zato je bilo zelo smiselno opustiti to funkcionalnost in zmanjšati velikost.

Mikro različica je približno 1/3 polna po teži in velikosti.
Spajkalni konektorji
Spajkanje konektorjev na MinimOSD polne velikosti je bilo enostavno in preprosto, toda pri mikro različici mi ni všeč, kako jih ljudje običajno spajkajo.

Moja ustvarjalnost je uporaba kotnih konektorjev namesto ravnih, tako da imam dodaten prostor pri montaži znotraj štirikolesnika.
Na samem koncu zapakiramo toplotno skrčenje za zaščito spajkanja in žic.
Povežite se z Naze32, baterijo, sprejemnikom, kamero, video oddajnikom
Sestavljanje mojega helikopterja je zelo preprosto. Tukaj na diagramu vse, kar je treba povezati: Naze32, LiPo, sprejemnik, FPV kamera in video oddajnik.

Shema povezave navadnega MinimOSD z Naze32, kamero, sprejemnikom, video oddajnikom, baterijo.
Kako povezati mikro različico:

Pogosto zastavljeno vprašanje 1. Nekateri se pritožujejo, da besedilo izgine, ko povečate plin. Rešitev: priključite vso elektroniko - kamero, OSD, video oddajnik na skupno ozemljitev.
FAQ 2. OSD se ne prikaže, samo slika iz kamere. Rešitev: poskusite spremeniti standard PAL/NTSC v nastavitvah OSD.
Pin VBAT1 je priključen na glavno litijevo baterijo za prikaz napetosti. Pin RSSI je priključen na krmilni sprejemnik za prikaz nivoja signala (če je sprejemnik FrSky D4R-II, v načinu CPPM, potem je Pin1 signal PPM, PIN2 izhod RSSI).
Povezava z Naze32 prek serijskih vrat (TX in RX) bo Naze32 omogočila pošiljanje podatkov o letu na zaslon (GPS, smer kompasa itd.), OSD pa bo lahko spreminjal PID koeficiente krmilnika letenja z uporabo daljinec.
Bodi previden! Povezava z računalnikom uporablja enaka serijska vrata, kar pomeni, da če želite uporabiti konfigurator Baseflight ali Cleanflight, morate najprej onemogočiti TX in RX iz OSD.
Brez povezave zaporednih vrat bo MinimOSD sam prikazal RSSI in napetost.
Če uporabljate Taranis v načinu PPM, preberite ta članek: kako dobiti RSSI na ločenem kanalu (brez dodatnih žic).
Takole izgleda znotraj mojega mini štirikolesnika.
Konfiguriranje z MW-OSD GUI
Za MinimOSD je kar nekaj firmwareov, moj najljubši je Multiwii-OSD (mwosd). Trenutna različica je 1.3., njen konfigurator je zelo priročen program. Zaslonski meni je jasen, vdelana programska oprema je posodobljena, podpora za Cleanflight in Baseflight. Omogoča vam tudi prilagajanje dobičkov PID neposredno iz zaslonskega menija.
Povežite MinimOSD s programatorjem FTDI
Tako nastavitev kot vdelana programska oprema zahtevata adapter FTDI. Povezava poteka preko 5 žic: DTR (GRN), TX, RX, 5V in GND.


Nastavitev MinimOSD z uporabo MW-OSD GUI
Preko grafičnega vmesnika lahko konfigurirate prikaz poljubnih podatkov o letu. Ker Letim z mini quad, vse kar potrebujem je napetost baterije, RSSI in časovnik. Uporabljam litijeve baterije 4S in opozorilo o nizki bateriji je nastavljeno na 13,6 V (3,4 V na celico, čeprav bi moral prag nastaviti višji). Za konfiguracijo 3S lahko napetost, pri kateri se prikaže opozorilo, nastavi na 11 V. Uporabljam FPV v formatu PAL

Edina stvar, ki vas skrbi, je napetost baterije. Privzeta vrednost še zdaleč ni idealna, zato se morate poigrati z nastavitvami, da dobite pravilno vrednost. Kako to naredim:
Privzeta vrednost za " nastavitev napetosti" = 200, in napetost, prikazana na OSD, je bila 21,0 V. Vzel sem multimeter, izmeril napetost na bateriji in dobil 11,1V

Zdaj pa znižajmo vrednost prilagoditev napetosti»Do 110, zdaj imam 11,5 V na OSD zaslonu. Da bi se izognili stalnim spremembam parametra naprej in nazaj, moramo izračunati natančno vrednost z uporabo matematike in informacij, ki jih že imamo 🙂 Izračunati moramo, koliko voltov daje 1 vrednost parametra "prilagodi napetosti".
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Vemo, da mora biti pravilna vrednost na zaslonu 11,1 V, torej vrednost " prilagoditev napetosti"moral bi biti:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 je v redu)
pomen " prilagoditev napetosti» se lahko spreminja ne samo v konfiguratorju, temveč tudi prek zaslonskega menija, tako da ni treba MinimOSD povezati z računalnikom in uporabljati konfigurator.
Arduino kot programer za MinimOSD?
Svoj Arduino UNO sem poskusil uporabiti kot programator FTDI, kot sem to že storil za druge naprave. Uspelo mi je spremeniti parametre OSD prek programa MW-OSD GUI. Vendar pa sem naletel na težavo pri utripanju MinimOSD, sporočilo o napaki je bilo:
avrdude: stk500_getsync(): ni sinhronizirano: resp=0x00.
Videti je kot nekakšna težava s sinhronizacijo podatkov, vendar sem se prepričal, da sem DTR pravilno priključil na RESET na Arduinu, ne vem, kaj še naj storim, zato sem uporabil svoj programator FTDI za preklop na MinimOSD.
OSD meni: nastavite PID-je, hitrost, napetost, RSSI
OSD meni je moja najljubša funkcija in zato sem se v bistvu odrekel SuperSimple OSD. Obstaja veliko nastavitev, ki jih lahko spremenite brez povezave z računalnikom. Vrednosti PID koeficientov lahko na primer spreminjam neposredno na terenu z daljinskim upravljalnikom, brez bluetootha in računalnika! Vendar pa v Cleanflight (angleščina) ne morete ločeno spreminjati parametrov roll rate in pitch rate, v trenutku, ko sta povezana (lahko spremenite samo oba hkrati, pribl. prev.) V novi različici bodo ti parametri neodvisni.
Za dostop do menija MW-OSD morate najprej razorožiti helikopter, nato:
- plin na sredini
- yaw (jaw) - desno
- smola (pitch) - naprej.
Za krmarjenje po meniju:
- Roll/pitch (pitch/roll) - za premikanje po meniju
- Yaw (yaw) - spremeniti vrednosti
- Konfiguracija PID (PID roll/pitch/yaw za različne načine letenja)
- RC uglaševanje (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (Throttle PID Att)
- Napetost (prikaži ali ne napetosti, vrednosti "Prilagodi napetost", "Napetostni alarm", "Celice")
- RSSI (pokaži ali ne)
- Tok (prikaži porabljen tok ali ne, njegova nastavitev)
- Napredno (enote: metri/palci, signal: Pal ali NTSC, kompas)
- Zaslon (stikala, plin, GPS koordinate, senzorji, kardan itd.)
- Statistika (razdalja, maks. višina, največja hitrost, čas letenja)
utripa
Nekateri proizvajalci MinimOSD sami uganjajo najnovejšo različico, tako da vam ni treba skrbeti za utripanje. Morda pa boste pozneje želeli posodobiti vdelano programsko opremo ali poskusiti z drugo, preveriti različico vdelane programske opreme, vklopiti OSD na quad-u in pogledati napis na zagonskem zaslonu.
Vsaka vdelana programska oprema v navodilih podrobno opisuje, kako utripati. To je povzetek:
- Prenesite datoteke vdelane programske opreme.
- Prenesite Arduino IDE
- Odprite datoteke vdelane programske opreme v Arduino IDE
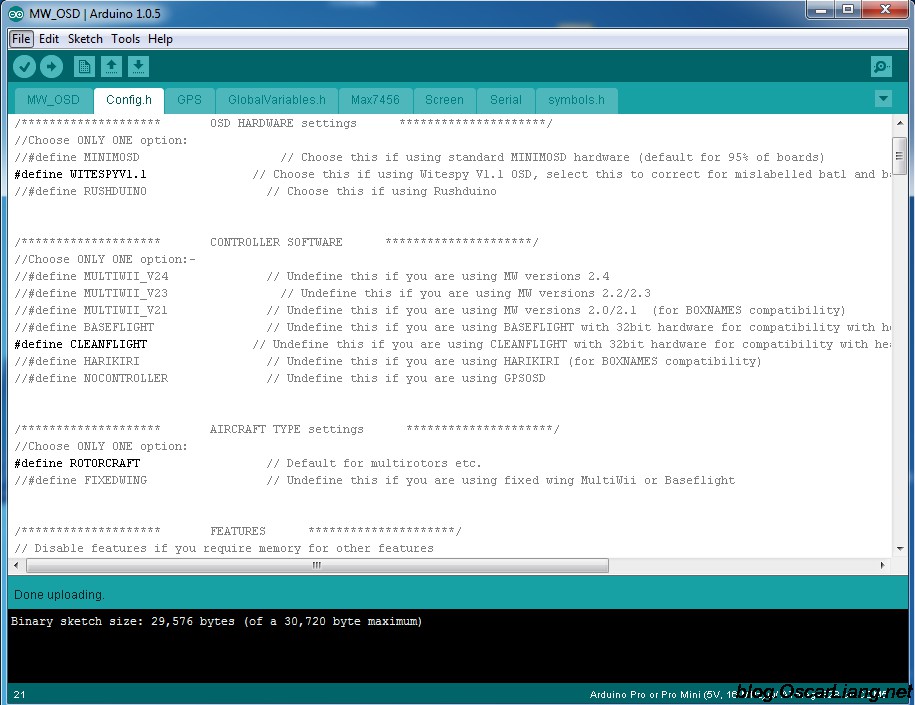
- Po potrebi spremenite nastavitve
- Nisem veliko spreminjal, samo tip plošče (WitespyV1.1) in vdelano programsko opremo krmilnika letenja (Cleanflight)
- Priključite FTDI adapter (programator) na MinimOSD / Micro MinimOSD
- Kliknite Prevedi in naloži
 OSD za ArduPilot Mega - sistem za prekrivanje telemetričnih podatkov na video posnetku letenja
OSD za ArduPilot Mega - sistem za prekrivanje telemetričnih podatkov na video posnetku letenja Zakaj se moj računalnik z operacijskim sistemom Windows ne poveže s telefonom v načinu dostopne točke Wi-Fi?
Zakaj se moj računalnik z operacijskim sistemom Windows ne poveže s telefonom v načinu dostopne točke Wi-Fi? Reševanje težave s prilagajanjem svetlosti na prenosnem računalniku
Reševanje težave s prilagajanjem svetlosti na prenosnem računalniku