miniosdをapmproに接続します。 ArduPilot MegaのOSDは、テレメトリデータをフライトビデオにオーバーレイするためのシステムです。 フルサイズMinimOSD
Betaflight OSD(Information On Screen)は、さまざまなセンサーからの情報をフライトコントローラーを介してビデオストリームに統合することです。 通常、OSDは、追加で取り付けられたボード、またはフライトコントローラーにすでに統合されているチップです。 OSDは、バッテリー電圧、地平線、高度などの情報をヘルメットまたはゴーグル画面に送信します。
OSDメニューを使用して、クワッドコプターのPID、フィルター、およびその他の設定を変更することもできます。 この記事では、Betaflight OSDとは何か、その機能、およびその設定方法について説明します。
Betaflight OSDとMinimOSD(MWOSD)
Betaflight OSDは、MinimOSDよりもシンプルで優れています。
- 1つ目は、フライトコントローラーにすでに統合されているチップで、はんだ付けや接続は必要ありません。MinimOSDは、PC、カメラ、ビデオなど、クワッドコプターのすべてのコンポーネントをはんだ付けする必要がある別のボードです。送信機など、使用するセンサーによって異なります。 さらに、このモジュールをコンピューターでフラッシュするには、プログラマーが必要です。
- Betaflight OSDの利点:すべてがすでに統合されているため、セットアップが簡単です。 構成はBetaflightGUIで行われます。 はんだ付けしたり、フラッシュしたりする必要はありません。プログラマーやサードパーティのモジュールファームウェアも必要ありません。
- Betaflight OSDは、通常SPI BUSに接続されているため、UARTポートを占有しません。
現在、MinimOSDはすでに非常によく開発されており、グラフィカルシェルと同様の特性も備えています。
BetaflightOSDをサポートするフライトコントローラー
OSDが統合されたすべてのフライトコントローラーがBetaflightOSDをサポートしているわけではなく、追加のOSDセットアップソフトウェアが必要なものもあります。
現在、Betaflight OSDは、Matek F405、DYS F4 Pro、Kakute F4、Omnibus F4、BetaflightF3の航空機でサポートされています。
BetaflightOSDの構成
OSDはBetaflightファームウェアV3.1以降でサポートされているため、最初に最新のフライトコントローラーファームウェアを使用していることを確認してください。
航空機にすでにOSDチップが統合されている場合は、カメラとビデオ送信機を適切なポートに接続するだけです。
以下は、カメラと送信機をDYS F4 Pro FCフライトコントローラーに接続する方法の例です。カメラは「Vin」に接続し、送信機は「Vout」に接続します。
次に、Betaflight Configuratorに接続し、タブに移動します 構成オンにします OSD:
その後、[OSD]タブに移動して、セットアップを開始します。
このインターフェースよりも簡単なものは何でしょうか? 表示したいデータのオンとオフを切り替えるだけです。
ビデオフォーマット-FPVカメラのモードに応じて、PALまたはNTSCを選択します。 カメラのモードがわからない場合は、AUTOに設定すると、プログラムはカメラが機能するための適切な形式を選択します。
重要な情報:プレビュー画面がPALまたはAUTOモードで、カメラがNTSCの場合、画面の下部に表示されるデータが切り取られます。これはこの形式の機能であり、フレームが短くなります。 AUTO形式を使用する場合は、必要なデータを画面の中央に配置するのが最適です。
「アラーム」ブロックでは、RSSI値、バッテリー容量、飛行前時間(ストップウォッチ)、高度を設定できます。 データがこれらの数値と一致し始めるとすぐに、ヘルメットまたはゴーグルの画面で点滅し始めます。
プレビューウィンドウでは、表示されているデータを好きなようにドラッグできますが、データが途切れる可能性があるため、端に近づけすぎないでください。
- バッテリー電圧表示
- 飛行時間(ストップウォッチ)
- 名前(自分)
- ガス値
- ドローンはどのくらいの電流を消費しますか
- どのくらいのmAhバッテリー容量が無駄になっているのか
メガネまたはヘルメットでOSDメニューをアクティブにするには、リモコンのスティックの動きを組み合わせる必要があります。
- 中央のガス
- ヨー(ヨー、軸ロール)左
- ピッチ(ピッチ、チルト)前方
ガスはチューニング全体の途中にある必要があります!
メニューをナビゲートするには、 右スティックリモートで。 スクロールするには-上または下に貼り付け、メニュー項目を選択するには-左/右に貼り付けます。
ここでは、PID、フィルター、プロファイルなどを変更できます。 OSDタブのGUIを使用してBetaflightをすでに構成している場合、これらの設定のほとんどは自明です。 しかし、それでも、すべてのアイテムがここにあるわけではなく、一部はコンフィギュレーター自体でのみ使用できます。 設定後、メインメニューに移動して「 保存*再起動«.
BetaflightOSDでフォントを変更する方法
画面に表示されているフォントが気に入らない場合は、Betaflight Configuratorで簡単に変更できます。これを行うには、[OSD]タブに移動すると、下部に[フォントマネージャー]ボタンが表示されます。
新しいフォントを選択した後も、プレビューウィンドウにはデフォルトのフォントが表示されますが、ゴーグルとヘルメットで選択したフォントが表示されるので、心配する必要はありません。
よくある質問
ヘッドセットでOSDからのデータを表示できないのはなぜですか?
正しいビデオ形式(PALまたはNTSC)を指定したかどうかを確認し、交換してみてください。 それでも機能しない場合は、カメラと送信機からOSDモジュールまでの配線とはんだ付けの品質を確認してください。
名前を変更するには?
Betaflightの[設定]タブで下にスクロールすると、[クラフト名]というテキストフィールドが表示され、そこに別の名前を入力できます。
APMコントローラーのユーザーがテレメトリデータをオーバーレイするための特別なデバイスであるMinimOSDが開発されました。 略語OSDは、英語のオンスクリーンディスプレイに由来します。これは、オペレーターの画面に追加情報を表示することを意味します。
中国のメーカーは、両方のフライトコントローラー(HKPliot Mega、ArduFlyer、OSDコントローラー)をMAVLink-OSDとしています。

外部的には、Minim OSDはMAVLink-OSDと大差ありません。これは、メインチップが45度回転するボードのミラーコピーのようなものです。 また、MAVLink-OSDには、ビデオ信号のタイプを選択し、デジタル部分とアナログ部分のパワーを組み合わせるためのジャンパーがありません。
Minim OSD v1.0では、12ボルトのカメラ電源を使用すると過熱の問題が発生しました。この問題は、v1.1で解決されています。
2013年末にHKで配送に問題があったため、RCTimerにMAVLink-OSDを注文しました。

プログラミングには、間違いなくFTDIアダプターが必要です。 そのため、MAVLink-OSDと一緒に、すぐにFTDI ToolV1.0アダプターhttp://www.rctimer.com/product_684.htmlを使用しました。

デバイスを構成してフラッシュするには、ArduCam-OSDと呼ばれる特別なソフトウェアが必要です。 最新のArduCam-OSDソフトウェアとファームウェアをhttp://code.google.com/p/arducam-osd/downloads/listからダウンロードします。 現在、現在のバージョンは2.0です。
代替ファームウェアをインストールすることもできます。このプロジェクトはminimosd-extraと呼ばれます。 情報はここhttps://code.google.com/p/minimosd-extra/にあります。 ファームウェアについては、独自のユーティリティ(MinimOSD-Extra Config Tool)が必要になります。 原則として、アーカイブにはユーティリティとファームウェアが含まれています。 https://code.google.com/p/minimosd-extra/downloads/listからダウンロードできます。 バージョン数から目が離せない。
ボードとアダプターをシュリンクラップで包みました。
接続用のコントローラーコネクタは非常に不便で、6ピンで、「絶対確実」な保護がありません。 すべてのピンはプログラミングに使用されますが、フライトコントローラーへの接続には4つのピンのみが使用されます。
プログラミングについては、ミニUSBケーブルを見つける必要があります。

4ピンコネクタに関しては、ここではすべてがより複雑です。 混同して正しく接続しないと、煙が出ることがあります。
OSDをテレメトリコネクタのフライトコントローラに接続します。 OSDへのワイヤは、中央のピン(GND、VCC、RX、TX)に接続する必要があります。
無線モデムを使用する場合は、並列に接続します。 そのため、Yケーブルをはんだ付けする必要がありました。

写真は、GPSも1つのコネクタに接続されているAIOPコントローラのワイヤを示しています。
私はOSDのTXに接続されているワイヤーを取り外さなかったので、ユニバーサルになるので、このワイヤーをどこで使用するかはわかりません。
ボードのアナログ部分に5ボルトを印加しないと、ボードは無音になることに注意してください。

いくつかのリソースは、ボードを作り直して、デジタルのものからアナログ部分に電力を供給することを提案していますが、干渉が現れるかもしれないという意見があるので、私はこれをしませんでした。
1つの電源から接続する場合の回路は写真のようになります。

私は現在、ビデオ送信機を搭載したアナログ部分を持っています。これについては、前の記事ですでに説明しました。
ArduCAMOSD構成
ネイティブのArduCAMOSDConfigユーティリティから始めましょう。 現時点では、現在のバージョンは2.1.2.0です。
主な要素のうち、プログラムメニューと、次の画面を切り替える3つのタブを強調表示する必要があります:構成、パネル1、パネル2。
構成、ここではすべてが非常に明確です。
まず、ポート番号を選択し、[OSDから読み取る]ボタンをクリックします。

ビデオ信号のタイプNTSC-PALは、ビデオモードプログラムのメニューを介して切り替えられることに注意してください。 [ファイル]メニュー項目を使用すると、設定を保存してロードしたり、デフォルト設定に移動したりできます。 [オプション]メニューでは、Panel1および2のグリッドモードを有効にし、ファームウェアを更新し、背景画像を選択し、設定にログを使用し、独自のフォントを追加できます。

パネル1は、最初の画面のビデオに表示される情報をカスタマイズするために使用されます。 チャネル切り替えは、無料の無線制御チャネルOSD ToggleChannelに設定されます。

したがって、2番目の画面では、パネル2を設定します。

ファームウェアは同じユーティリティを使用して更新されます。

MinimOSD-追加の構成ツール
MinimOSD-Extra Config Toolプログラムを開くと、フォルダーが混同され、ArduCAM OSDConfigが再度起動されたようです。 これは第一印象で、実際には非常に似ていますが、より多くの設定があります。
主な違いを見てみましょう。
最初の項目は、モデルタイプの選択です:飛行機、ヘリコプター。
警告が発生したときに、ドロップダウンメニュー(警告自動パネル切り替え)で指定された画面に自動的に切り替えるオプションが追加されました。 これは、たとえば、表示を妨げるものがないように2番目の画面ですべての情報が削除される場合に必要です。
バッテリーをパーセントまたはmAで表示するように選択できます。
そしてもう1つ値ブロックの前に記号を表示します。これは値の前にアイコンを表示する役割を果たします。

最初の画面

2番目の画面

結果
まず、ArduCAM OSDConfigを介してファームウェアをインストールしました。

原則としてすべてが正常でしたが、1つのニュアンスが邪魔でした。それは次のように表現されました。
デバイスを接続した後、画面上で左側の情報の一部が途切れていることに気づきました。 パラメータ値の前にあるアイコンが半分欠落しています。 信号の種類をPALに変えてみることにしましたが、さらに悪化し、画面の上下が途切れてしまったので、NTSCに戻しました。 特に左側でこの欠点を修正しようとすることができるので、それを片側だけにし、3つにはしないようにします。

移動した情報は、1文字右にブロックします。

操作は無痛でした、これのために十分なスペースがありました。


その結果、すべてがうまくいき、アイコンが完全に表示され、情報が画面上で完全に読み取れるようになりました。
しかし、MinimOSD-Extraファームウェア2.4 R726がインストールされましたが、画面になんらかの不名誉を与え始めました。

画像が読めなくなり、画面全体で情報が混乱しました。

以前のバージョン2.2をダウンロードしました。

このファームウェアバージョンでは、情報が歪みなく表示されるようになりました。

結論
コンパクトで安価なデバイス。 非常に普遍的で、元のArduPilot Mega(APM)ボード、そのクローンHKPILOT Mega、ArduFlyer、およびMPNGまたはMultyWiiファームウェアを備えたAIO(All-In-One)シリーズコントローラーの両方で使用されます。 フォーラムにはDJINazaコントローラーへの接続に関する情報がありますが、これにははんだごてを手に持って作業する必要があります。
唯一の欠点は、ボード上の6ピンコネクタで、ケーブルを4ピンコネクタに接続します。 さまざまなバリエーションがあります。間違えると、保護がないため、ボードを焼く可能性があります。
また、ボードのデジタル部分とアナログ部分に電力を供給することを忘れないでください。そうしないと、機能しません。 どちらの栄養法を選ぶか、ここでは誰かにとってより便利になります。
もちろん、私はMinimOSD-Extraが好きでした。これにより、ArduCam OSDConfigにない追加の設定を実行できるようになります。 しかし、結局のところ、安定したバージョンを見つける必要があります。 一部のファームウェアでは、ビデオを介した情報の出力が壊れているという事実に遭遇しました。 初めてではなく、動作するバージョンを見つけることができました。 したがって、一部のMinimOSD-Extraオプションは使用できませんでした。 残念ながら、これは多くのオープンソースプロジェクトのマイナスです。
したがって、ArduCam-OSD Configはより安定しており、実績があることに注意してください。
コントローラは、ビデオ上の情報の高品質なオーバーレイを実行します。テキストは非常に明確で、小さな画面で読みやすく見えます。 情報の表示が遅くなることはありませんでした。
OSDは、カメラの飛行に便利なアクセサリです。 この記事では、OSDとは何か、それがFPV機器にどのように接続されるか、そして最後に、さまざまなOSDの機能の概要を見ていきます。
ご不明な点がございましたら、コメント欄でお知らせください。
OSDとは何ですか?その利点は何ですか
OSDはOnScreenDisplayの略です-つまり 画面または画面のメニューに表示します(つまり、メインの画像の上に、通常はカメラから、いくつかの追加情報が表示されます。ほとんどはテキストです)。 私たちの趣味では、OSDはカメラ画像の上にフライトデータを表示する小さなプリント回路基板です。 これにより、飛行中にカメラでクワッドコプターの状態を直接監視できます。
適切なセンサーとOSDがあれば、ゴーグルやモニターで、バッテリー電圧、モーターやその他の電子機器に流れる電流、高度、GPS座標などのフライトデータを確認できます。
これにより、バッテリーレベルを確認し、着陸するタイミング、すでに飛行した距離、戻る必要のある方向を知ることができるため、カメラの周りをより安全に飛行できます。
OSDはカメラの飛行には必要ありませんが、ご覧のとおり非常に便利です。 ほとんどの人は、バッテリーの電圧を確認するために少なくともSimpleOSDを購入します。これは、過放電を回避するために必要です(遠くまで飛ぶと、バッテリーの低下を知らせるサイレンが聞こえなくなります)。
OSDを使用して表示できるデータ型
写真は、カメラの周りを飛行するときに最も一般的に使用されるデータセットを示しています。

タイマー
OSDのタイプに応じて、これは飛行時間(離陸した瞬間から開始)または動作時間(クワッドコプターがオンになった瞬間から開始)になります。 一部のOSDでは、複数のタイプのタイマーを表示できます。
バッテリー電圧
ほとんどすべてのOSDでは、電圧を表示できます。 これは、カメラの周りを飛行するときに最も重要な情報であるため、いつ着陸するかがわかります(通常、電圧がセルあたり3.5Vに低下したときに着陸します)
消費電流
電流センサーがある場合は、モーターが消費している電流の量と、バッテリーのmAhがすでに消費されている量を追跡できます。
RSSI
RSSIは、送信機の信号強度の指標であり、通常はパーセンテージで表示されます。 遠くに飛ぶほど信号が弱くなり、この情報はどの時点で引き返す必要があるかを知るのに役立ちます。
RSSIは、コントロールレシーバーからの出力であり、通常はPWM形式であるため、D / Aコンバーターとローパスフィルターが必要になる場合があります。
警告
一部のOSDは、さまざまなアラームや警告を表示できます。ユーザーは、バッテリー電圧やRSSI値などのパラメーターのしきい値を設定する必要があります。
機内モード
航空機の現在の飛行モードを表示します。 この情報は、ロイター(ホバリング)、手動モード、セルフレベリングモードなどのさまざまなモードを頻繁に切り替える場合に役立ちます。そのため、航空機が現在どのモードにあるかを考える必要はありません。 これを行うには、フライトコントローラーをOSDに接続する必要があります。
GPS
GPSを使用すると、ドローンの座標だけでなく、その高度も取得できます(ただし、気圧計やソナーを使用するよりも正確です)。 巧妙な計算のおかげで、地上の速度、開始点までの距離、およびその座標を確認できます(開始点に向かう方向のグラフィック表示は、特に少し迷った場合に非常に便利です)。
地平線
仮想地平線は、ドローンが宇宙でどのように傾いているかを理解するのに役立ちます。
カメラ、ビデオ送信機、フライトコントローラーのOSD接続
私はすべてのOSDを3つのタイプに分けます:
- スタンドアロンOSD
- フライトコントローラーに依存するOSD
- ハイブリッド
スタンドアロンOSDは、カメラとビデオトランスミッターにのみ接続し、フライトコントローラーとは通信しません。 場合によっては、測定値にアクセスするために、GPSまたは他のセンサーに直接接続することができます。 このタイプの良い例は、Skylark OSD(+ GPSおよび電流センサー)およびSuper SimpleOSDです。
コントローラーに依存するOSDは、通常はシリアルポート(RX / TX)を介して、フライトコントローラーからのデータのみに依存します。 OSD自体はこのデータを表示するだけです。 HobbykingのMinimOSDは、このタイプのOSDの良い例です(バージョンがKV modのように変更されていない場合)。 このタイプの利点は、OSDがコントローラーのセンサーから受信したデータを使用することです。つまり、コントローラー自体がこのデータを使用して、管理と制御を簡素化します。 スタンドアロンOSDの場合、OSDに接続されたセンサーからのデータをフライトコントローラーで使用することはできません。
ハイブリッドタイプのOSDは、スタンドアロンのOSD(機能が制限されています)として使用できます。また、コントローラーに接続して、表示されるフライトデータのセットを増やすこともできます。 KV modを使用したMinimOSDは、このタイプのOSDの優れた例です。スタンドアロンとして使用した場合はRSSIと電圧のみが表示されますが、GPSを使用してコントローラーに接続すると、現在の飛行モード、GPS座標、高度が表示されます。 、など。
最も簡単な接続-スタンドアロンOSD
例として、Hobbyking Super Simple OSDをFPVカメラ、ビデオトランスミッター、3Sリチウムバッテリーに接続します。

理論的には、Bat2ポートを使用して2番目のバッテリーの電圧を監視できます。
ハイブリッドOSDの接続
この場合、OSDはバッテリー電圧とRSSIレベルを個別に測定することに注意してください(コントローラーに接続してシリアルポートを介してデータを送信することは可能ですが、どちらのオプションも正常に機能します)。
座標、始点までの方向、始点までの距離を表示する必要がある場合は、GPSをNaze32に接続する必要があります。
すでに使用しているOSD
KV TeamModを使用したMinimOSD
MinimOSDは現在私のお気に入りのOSDであり、私が使用しているものです。 適切なファームウェアをダウンロードすることにより、MinimOSDをNaze32、CC3D、Multiwii、APM、およびPixHawkボードで使用できます。 これは、センサーから入手できるすべてのフライト情報を完全に表示できる非常に優れたボードです。

MinimOSDは、センサーから入手可能な情報を表示できます
HobbykingとBanggoodはMinimOSDを販売していますが、RSSI、バッテリー電圧などの側面に追加のピンがない元のバージョンがあります。 MinimOSD KV Modを購入できる場合は、連絡しません。
MinimOSDマイクロ

上記とまったく同じOSDですが、サイズが小さい点が異なります。 さらに、12V-> 5Vコンバーターはありませんが、これは重要ではありません。 とにかく、ボードの過熱のためにこのコンバーターを使用する人は誰もいません。
BrainFPV
このボードには、適切なセンサーを備えたものもすべて表示されます。

この記事では、MinimOSDの接続、フラッシュ、および構成について検討します。 そして、すべてが悲しげに終わらないように、何をすべきか(何かがうまくいかなかった場合、そして何をすべきか)の質問にも答えます。
« Petka-デバイス!?!? -300 !!! -300は何ですか? -楽器はどうですか?
MinimOSD。 安くてとても便利なスカーフ。 ヘリコプターで現在何が起こっているかを確認できます。現在の電圧、使用されたアンペア数、全地球測位衛星の数がキャプチャされ、空で「迷子」になることもありません。 空で迷子になることは不可能だとあなたは言いますか? そしてここでそれは非常に可能です。 初歩から「離陸したけど、上とは違う…ああ、私はどこにいるの?」から始まり、暗闇や降水中の飛行、誤って飛び込んだなどの困難な飛行条件で終わります。下のビデオのように、クラウド:
4分目には、保存矢印「ホーム」だけがどこに飛ぶかを示しました。
さて、さて、十分な歌詞、練習しましょう!
準備。
そこで、MinimOSDを自分で注文しました。 Banggood、Hobbyking、RCTimerの場合-どこにいても、次のようなものがあります。
私の手は、それをワークステーションに接続して、それが何を示しているかを確認するためにかゆみを感じています。 しかし、一度にすべてを行う必要はありません! それは新しいOSDを注文することに満ちています-そしてこれは時間の損失(これが主なものです)そしてもちろんお金の損失です。
ボードには、ATMEGA328PとMAX7456の2つの大きなチップがあります。 最初のマイクロ回路(より正確にはマイクロコントローラー)は、フライトコントローラー(ボードの「デジタル部分」)との通信を担当します。 2つ目は、マキシムのシングルチャンネルモノクロOSD(OnScreenDisplay-画面上のメニュー)です。これをボードの「アナログ部分」と呼びましょう。 したがって、このMAX7456はかなり気まぐれなマイクロサーキットです。 彼女は過熱が好きではなく、「デジタル」グラウンドと「アナログ」の間の鋭いジャンプが好きではありません。つまり、簡単に燃えます。 そして運が良ければ、怠惰な中国人は決してマイクロ回路の通常のヒートシンク(「腹」)をはんだ付けしないでください。 ハンカチを元の形で使用すると、MAXが燃焼します-80%の保証があります。 これを防ぐために、下の写真でマークされている3つの穴をはんだ付けします。

これを行うには、薄いはんだ(直径1 mm、すぐにフラックスが付いていることが望ましい)を穴に挿入し、はんだごてで加熱します。

そして、ここに結果があります(はんだ付けはあまり良くありませんが、私ができる限り-あなたはもっとうまくいくでしょう!)

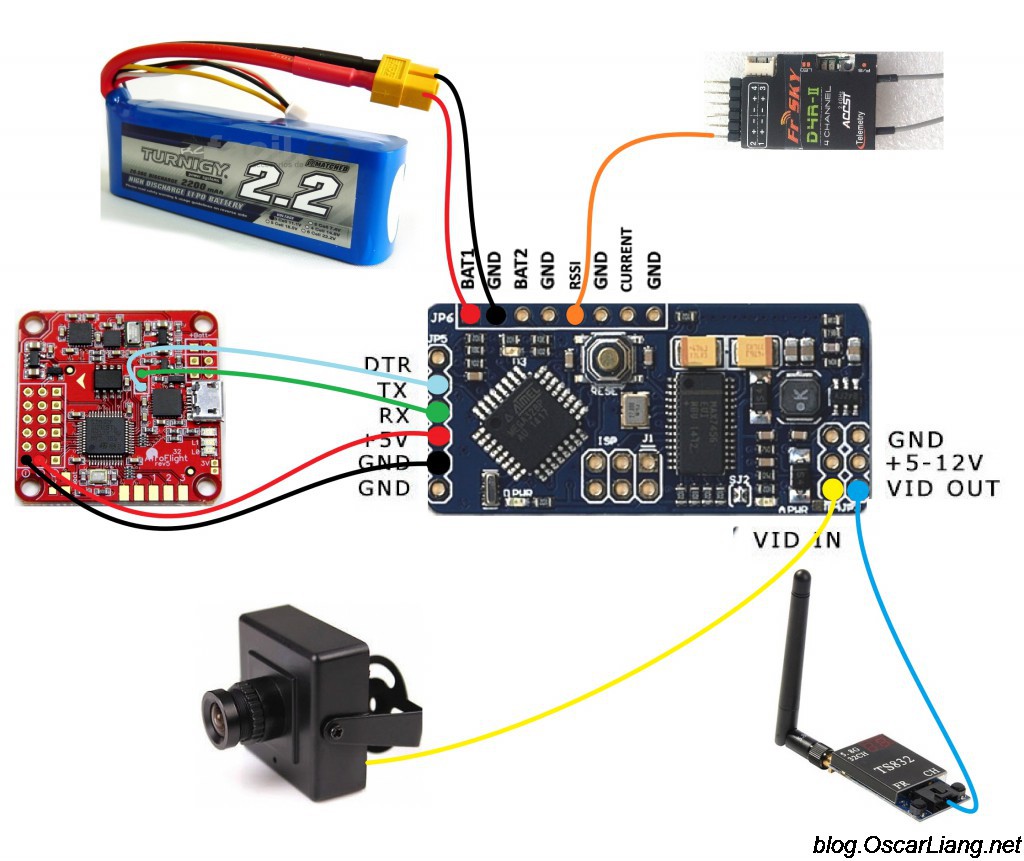
次に、接続の機能について説明します。 気配りのある人は、私がジャンパーを上からはんだ付けしたことに気づきました。 MinimOSDを接続する方法はいくつかありますが、多くのコピーが壊れているため、より適切またはより正確であるか、干渉が少なくなります。 私は、デジタルとアナログのアースと「デジタル」部分からの5ボルトからの電源を組み合わせた接続方法を使用します。 minimOSDはかなりの量を消費するため、別の電源からボードに電力を供給することをお勧めします。 ほぼ次のようになります。

つまり、上部にジャンパーをはんだ付けして、アースを結合しました。 そして、ボードの「前面」側にジャンパーを1つドロップする必要があります。

接続とセットアップ
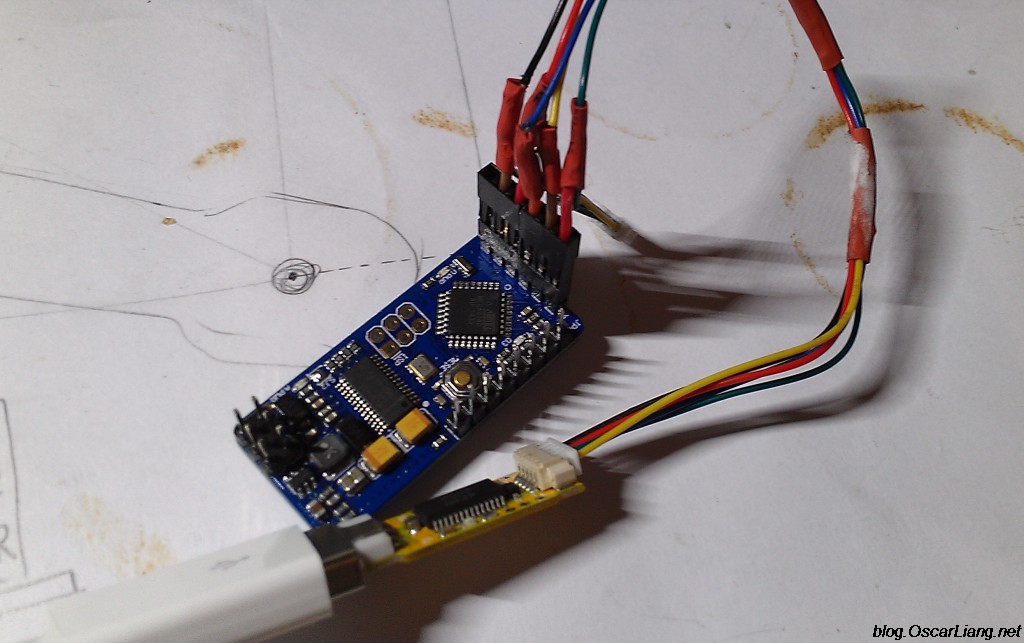
さて、すべてがはんだ付けされました。これで、スカーフをコンピューターに接続する準備が整いました。 これを行うには、FTDIアダプター(たとえば、オン、またはその他のUSB-UART TTLアダプター)が必要です。

5本のワイヤーを使用して接続します。接続図は次のとおりです。1。GRN、2。Tx、3。Rx、4。+ 5V、5。GND(OSD側)-FTDIアダプターに接続します1. DTR 、2。Rxi、3 .Txo、4.VCC、5.GND。 これが私にとってどのように接続されているかの写真です:

はっきりしない場合は、このビデオを、特に1:03に注意深く見てください。
さて、何をダウンロードし、どのように設定するか。 まず、コプターと航空機ではファームウェアが異なります。 Multivia(kvTeam)のファームウェアもあり、独立した作業(フライトコントローラーなし)からNazaへの接続まで、個別のmodもあります。
しかし、ここでは「古典的な」ケース、つまりAWPコントローラーのヘリコプターを検討しています。 プロジェクトの公式ページ。 ダウンロードページ(AWPのヘリコプターの場合、ExtraCopterをロードする必要があります)。 しかし、これらは古いバージョンであり、それ以来、人々はかなり多くの変更を加えてきました。 最新のファームウェアはにあります。 この記事の執筆時点では、これはR800ファームウェアであり、Ya.Disk上にあります(ユーザーMinimOSD_Extra、パスワードTop_Secret)。
アーカイブには、ファームウェア自体(HEX-ファイル)、フォントを含むファイル(mcm-ファイル)、およびプログラム自体(OSD_Config.exe)が含まれています。
まず、デバイスマネージャーに移動して、FTDIポートの速度を確認します(115200を設定します)。

OSD_Config.exeプログラムを起動し、ポートを選択して、[Read From OSD]ボタンを押すと、正常に読み取られたことを示すメッセージが表示されます。 工場出荷時にどのファームウェアがロードされているかわからないので、今後問題が発生しないように、新しいファームウェアを入れていきます。 これを行うには、メニューOptios> UpdateFirmwareをクリックします

ファイルを選択してアップロードします。
成功したファームウェアに関するメッセージを受け取ります

次に、コントローラーは設定を初期化してプログラムにロードします。これは報告されます

ファームウェアに一致するフォントファイルをダウンロードするときが来ました(これを行わないと、OSDの外観が非常に面白くなり、読めなくなる可能性があります)。 メニューの[オプション]> [文字セットの更新]を押します。

MCMファイルを選択してアップロードします

準備を待っています

注いだ後、コントローラーは再び初期化されます。



少し説明させてください。
RSSIチャネル-RSSIをパーセンテージに変換します。 ここで、5ボルトは255(8進数で最大)です。 また、FRskyレシーバーの最大信号は3.3ボルトです。 RSSI enable RAWチェックボックスをオンにすると、FPV画面に「raw」データが表示されます。 設定にドライブできるのはそれらです。 または、私の値を入力することもできます。
もう一つの微妙な点- OSD画面の切り替え。 ご覧のとおり、データ用のパネルが2つあります。 screen1(Panel1)、screen2(Panel2)、データのない空白の画面(Disabled)の3つの表示オプションに切り替えることができます。 これを行うには、最初に画面をどの程度正確に切り替えるかを決定する必要があります。 たとえば、ロータリーまたは3ポジションのトグルスイッチを使用して画面を切り替えると、チャネルごとに3つの値の範囲があります(パネル1:0-1233、パネル2:1233-1467、無効:1467- 1701)。 この場合、回転切り替えスイッチをオフにする必要があります。 また、単純な2位置トグルスイッチで切り替える場合は、回転切り替えを有効にするのが理にかなっています。 同時に、トグルスイッチがオンの場合、画面を順番に切り替えます(Panel1-> Panel2-> Disabled-> Panel1 ......)。トグルスイッチをオフにすると、画面の切り替えが行われます。止まる。 画面を切り替えるチャネルは、OSD ToggleChannelというタイトルのドロップダウンリストで決定されます。 私はそれをチャンネル番号6に置きました。そして、一部(私を含む)が最初に混乱している別の待ち伏せがあります-警告自動パネルスイッチ。 このリストは、以前に定義された警告のいずれかが発生したときに切り替える画面を定義します。 すべてがはっきりしているように見えます。 あなたは自分で飛んでいます、飛行中に何かが起こった、OSDはあなたが尋ねた画面に切り替わりました。 しかし、ここに質問があります-私たちは画面間の切り替えを設定します、原則として、これは自宅で構成され、ヘリコプターは飛ばない、私たちはチェックしたい-画面は切り替わらない! しかし、通常、自宅にはGPSフィックスがないため、つまり、警告が機能しました。 したがって、画面の切り替えは「機能しません」...🙂
残りのパラメータを明確にする必要があるかどうかはわかりません。後で記事を補足するかもしれません。
メイン画面を設定するときは、一度にすべてを押し込むべきではないとしか言えません。 最初にすべてをオフにして(左側の列で)、次に必要なものだけをオンにして、すぐに画面の右側に配置することをお勧めします。 画面の端に空きスペースを残すことをお勧めします。モニターまたはスタイラスまたはメガネを使用したDVRで切り取ることができます。
次に、もう一つの重要なポイント- MissionPlannerでのOSDセットアップ。 すべてを適切に接続したと仮定しますが、面白い数字や人工的な地平線の代わりに、「Mavlinkデータなし」という退屈な碑文が表示されます。 これは、OSDが機能していることを意味します。何かを見せていただければ幸いですが、データを受信していません。 つまり、ワークステーションからのデータはRxピンに送られません。 最初に考えられる理由は、接続時にワイヤが混同されていることです。 OSDからのRxがワークステーションのTxポートに接続されていることを確認します。 2番目に考えられる理由は、コントローラー自体がCOMポートにデータを送信するように構成されていないことです。 これを行うには、単純なケースで、[初期設定]> [オプションのハードウェア]> [OSD]タブで、[テレメトリを有効にする]ボタンを押す必要があります。 同時に、MPは、OSDにデータを送信できるようにするいくつかのパラメーターを自動的に構成します。 この魔法のボタンが役に立たなかった場合は、小さな手ですべてを設定する必要があります。 これを行うには、[CONFIG / TUNING]> [Full Parameter List]タブに移動し、文字Sまで下にスクロールして、パラメーター値を確認(または修正)します。
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
それでもデータが届かず、「Mavlinkデータがありません」という鈍い碑文が表示される場合は、OSDが正しいポートに接続されているかどうかを確認する必要があります(記事ではUART0について説明しています)。SR1パラメーターが必要になる場合があります(上記と同じですが、UART1ポートの場合のみです)。 OSDがテレメトリモデムと一緒に機能しない可能性もあります。この場合、OSDのTxワイヤを接続するか、逆に切断する必要があります。 USBケーブルをコンピュータに接続するとOSDが機能しないという不具合もあります。 または多分あなたはちょうどワイヤーを台無しにした...
もう一枚写真を共有します。 私のコントローラーでは、クラッシュのためにテレメトリのメインポートが機能しなくなり、UART0にはんだ付けしました。 そして、私はこの接続が好きでした。

ここでは、コントローラーから直接電源を供給しました。 ただし、コントローラー自体に5ボルトが残っているかどうかを確認する必要があります。 私の場合、コントローラー自体はレシーバーから電力を供給され、5ボルトより少し高く設定されているため、レシーバーとminimOSDを考慮すると、APM自体は厳密に5ボルトでした。
もう1つのポイントに触れる必要があります。 OSDが正しくフラッシュされない場合、エラー " ブートローダーとの通信に失敗しました"。 このエラーは、文字通り「ブートローダーとの通信エラー」として解釈されます。 ワイヤーが絡まった場合、またはブートローダーがクラッシュした場合に発生する可能性があります。 ワイヤーの場合、すべてが明確である場合(上記の正しく接続する方法を参照)、ブートローダーの場合、マイクロコントローラーを復元するための手順が必要です。
ブートローダーの復元。
これを行うには、少なくともプログラマーが必要です。 USBaspを使用する方が便利です。

多分あなたはこのアダプター(ISP10<>ISP6)
 またはこのケーブル(で利用可能)
またはこのケーブル(で利用可能)

一般に、何らかの方法で、プログラマーを使用してATMega328Pに接続します。
OSDボード上のISPコネクタのピン配置は一般的に受け入れられています。 通常、最初の接触は正方形です。 そうでない場合は、VccとGNDを調べて確認することをお勧めします。

プログラマーでは、ピンは通常署名されていますが、署名されていない場合は、通常、次のようになります。

これを行うには、最初にプログラマーのタイプを選択します

次に、ボードのタイプを選択します

そしてマイクロコントローラタイプ


ブートローダーがロードされるまで約1分待ちます(下部にある緑色のステータスバーを見てください)
 ブートローダーが正常にフラッシュされたことを示すメッセージが表示されるまで
ブートローダーが正常にフラッシュされたことを示すメッセージが表示されるまで

(以下のエラーには注意を払っていません。プログラマーのファームウェアを更新する必要があります)
次へ-OSD_Config.exeに移動し、すでに説明したように、ファームウェアとフォントを入力します。 ファームウェアを2回アップロードする必要がある場合があります(ブートローダーをアップロードした後、コントローラーを正しく初期化するには、もう1回必要です)。
さて、それがすべてです。 突然、知らない人はもっとあります。 ここで何かが明確でない場合は、そこで「生きて」見ることができます。
クワッドにOSDをインストールして頑張ってください!
いつもあなたのもの、 ガニエフ・ティムール-5yoda5.
5yoda5#apmcopter
2015年11月11日更新:「さて、すべてがはんだ付けされました。これで、スカーフをコンピューターに接続する準備が整いました。 これを行うには、FTDIアダプター(たとえば、RCTimerまたはその他のUSB-UART TTLアダプター)が必要です。
2016年11月3日更新:ISPピン配置画像を追加しました。
ページにエラーが見つかった場合は、をクリックします Shift + Enterまたは私たちに通知します。
このガイドでは、通常バージョンとマイクロバージョンの両方、MW-OSDファームウェアのセットアップ方法と使用方法、およびNaze32とレシーバーへの接続方法について説明します。
MinimOSDおよびMicroMinimOSDとは何ですか
セットアップは、プラグインしてすぐに機能するSuper Simple OSDやE-OSDなどの他のOSDよりもはるかに複雑ですが、MinimOSDには多くの利点があり、画面の外観は完全にカスタマイズ可能です。
最も便利な機能:GPS座標の表示、カスタマイズ可能なスタイルとフォント、画面上のメニューを使用して、PIDコントローラーの係数、レートなどを変更できます。 画面に表示できるものの例。
メニューからPID係数を設定します。

寸法、重量、ピン配置、寸法を減らすためのはんだ付け
フルサイズMinimOSD
このOSDは何年も前から存在しています。 このバージョン(KV Modを備えたMinimOSD)の利点は、電流センサー、RSSI、電圧センサーなどを接続するためのピンが側面にあることです。 以前は、ワイヤーをチップの脚に直接はんだ付けする必要があり、これは非常に困難でした。 このバージョンは、生活をずっと楽にしてくれました。 そのようなボードを1つ購入しました(バージョン2)

KV Mod V2を使用したMinimOSDの寸法:幅21mm、長さ:43mm、重量:5.5g(コネクタを含む)。
マイクロMinimOSD
このOSDのマイクロサイズには驚いていますが、フルサイズバージョンのすべての機能を備えています。 ボードの過熱により、旧バージョンではほとんど使用されていなかった12Vからの電源供給の可能性に加えて。 したがって、この機能を破棄してサイズを縮小することは非常に合理的でした。

マイクロバージョンは、重量とサイズが約1/3です。
はんだ付けコネクタ
コネクタをフルサイズのMinimOSDにはんだ付けするのは簡単で簡単でしたが、マイクロバージョンの場合、人々が通常それらをはんだ付けする方法は好きではありません。

私の創造性は、まっすぐなコネクタの代わりに角度の付いたコネクタを使用することです。これにより、クワッドの内側に取り付けるときに余分なスペースができます。
最後に、はんだ付けとワイヤーを保護するために熱収縮を詰め込みます。
Naze32、バッテリー、レシーバー、カメラ、ビデオトランスミッターに接続します
私のヘリコプターの組み立てはとても簡単です。 この図では、接続する必要のあるすべてのものがあります:Naze32、LiPo、受信機、FPVカメラおよびビデオ送信機。

Naze32、カメラ、受信機、ビデオ送信機、バッテリーを備えた通常のMinimOSDの接続図。
マイクロバージョンの接続方法:

よくある質問1.スロットルを上げるとテキストが消えるという不満があります。 解決策:すべての電子機器(カメラ、OSD、ビデオ送信機)を共通のアースに接続します。
FAQ 2. OSDは表示されず、カメラからの画像のみが表示されます。 解決策:OSD設定でPAL / NTSC標準を変更してみてください。
VBAT1ピンは、電圧を表示するためにメインのリチウム電池に接続されています。 RSSIピンは制御受信機に接続されて信号レベルを表示します(受信機がFrSky D4R-IIの場合、CPPMモードでは、Pin1はPPM信号、PIN2はRSSI出力です)。
シリアルポート(TXおよびRX)を介してNaze32に接続すると、Naze32はフライトデータ(GPS、コンパス方位など)を画面に送信でき、OSDはフライトコントローラーのPID係数を変更できます。リモコン。
気をつけて! コンピューターへの接続には同じシリアルポートが使用されます。つまり、BaseflightまたはCleanflight configuratorを使用する場合は、最初にOSDからTXとRXを無効にする必要があります。
シリアルポート接続がない場合、MinimOSDはRSSIと電圧を独自に表示します。
TaranisをPPMモードで使用している場合は、次の記事をお読みください:別のチャネルでRSSIを取得する方法(追加のワイヤーなし)。
これが私のミニクワッドの中の様子です。
MW-OSDGUIを使用した構成
MinimOSDにはかなりの数のファームウェアがありますが、私のお気に入りはMultiwii-OSD(mwosd)です。 現在のバージョンは1.3です。そのコンフィギュレータは非常に便利なプログラムです。 画面上のメニューがクリアになり、ファームウェアが更新され、CleanflightとBaseflightがサポートされます。 また、OSDから直接PIDゲインを調整することもできます。
MinimOSDをFTDIプログラマーに接続する
セットアップとファームウェアの両方にFTDIアダプターが必要です。 接続は、DTR(GRN)、TX、RX、5V、およびGNDの5本のワイヤを経由します。


MW-OSDGUIを使用したMinimOSDのセットアップ
グラフィカルインターフェイスを介して、任意のフライトデータの表示を構成できます。 なぜなら 私はミニクワッドを飛ばしています。必要なのはバッテリー電圧、RSSI、タイマーだけです。 私は4Sリチウム電池を使用しており、電池残量低下の警告は13.6Vに設定されています(しきい値を高く設定する必要がありますが、セルあたり3.4V)。 3S構成の場合、警告が表示される電圧を11Vに設定できます。 PAL形式のFPVを使用しています

心配するのはバッテリー電圧だけです。 デフォルト値は理想からはほど遠いため、正しい値を取得するには設定をいじくり回す必要があります。 どうすればいいのですか:
「のデフォルト値 電圧調整 "= 200、 OSDによって表示された電圧は21.0Vでした。 マルチメーターを取り、バッテリーの電圧を測定し、11.1Vを得ました

では、値を減らしましょう 電圧調整「最大110、今私はOSD画面に11.5Vを持っています。 パラメータの絶え間ない前後の変化を避けるために、数学とすでに持っている情報を使用して正確な値を計算する必要があります🙂「電圧調整」パラメータの1つの値を与えるボルト数を計算する必要があります。
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
画面上の正しい値は11.1Vである必要があることがわかっているので、値 " 電圧調整「次のようになります。
110-(11.5-11.1)/ 0.1056 = 106.21(106は問題ありません)
意味 " 電圧調整»は、コンフィギュレーターだけでなく、画面上のメニューからも変更できるため、MinimOSDをコンピューターに接続して、コンフィギュレーターを使用する必要はありません。
MinimOSDのプログラマーとしてのArduino?
以前に他のデバイスで行ったように、ArduinoUNOをFTDIプログラマーとして使用してみました。 MW-OSDGUIプログラムでOSDパラメータを変更することができました。 ただし、MinimOSDをフラッシュすると問題が発生し、エラーメッセージは次のようになりました。
avrdude:stk500_getsync():同期していません:resp = 0x00。
ある種のデータ同期の問題のように見えますが、DTRをArduinoのRESETに正しく接続していることを確認しました。他に何をすべきかわからないため、FTDIプログラマーを使用してMinimOSDをフラッシュしました。
OSDメニュー:PID、レート、電圧、RSSIを設定します
OSDメニューは私のお気に入りの機能であり、それが基本的に私がSuperSimpleOSDをあきらめた理由です。 コンピューターに接続せずに変更できる設定はたくさんあります。 たとえば、Bluetoothとコンピューターを使用せずに、リモコンを使用してフィールドでPID係数の値を直接変更できます! ただし、Cleanflight(英語)では、リンクされている時点でロールレートとピッチレートのパラメーターを個別に変更することはできません(両方を一度に変更できます。約Transl)。新しいバージョンでは、これらのパラメーターは独立しています。
MW-OSDメニューにアクセスするには、最初にヘリコプターの武装を解除してから、次の操作を行う必要があります。
- 真ん中のガス
- ヨー(ヨー)-右
- ピッチ(ピッチ)-前方。
メニューをナビゲートするには:
- ロール/ピッチ(ピッチ/ロール)-メニュー内を移動します
- ヨー(ヨー)-値を変更します
- PID構成(さまざまな飛行モードのロール/ピッチ/ヨーPID)
- RCチューニング(RCレート、RC Expo、ピッチ/ロールレート、ヨーレート、TPA(スロットルPID Att)
- 電圧(電圧の表示または非表示、「電圧の調整」、「電圧アラーム」、「セル」の値)
- RSSI(表示するかどうか)
- 電流(消費電流かどうか、その設定を表示)
- 高度(単位:メートル/インチ、信号:PalまたはNTSC、コンパス)
- ディスプレイ(スイッチ、スロットル、GPS座標、センサー、ジンバルなど)
- 統計(距離、最大高度、最大速度、飛行時間)
点滅
一部のMinimOSDベンダーは、最新バージョン自体をフラッシュするため、フラッシュについて心配する必要はありません。 しかし、後でファームウェアを更新するか、別のファームウェアを試して、ファームウェアのバージョンを確認し、クワッドのOSDをオンにして、起動画面の碑文を確認することをお勧めします。
指示の各ファームウェアは、フラッシュする方法を詳細に説明しています。 これは要約です:
- ファームウェアファイルをダウンロードします。
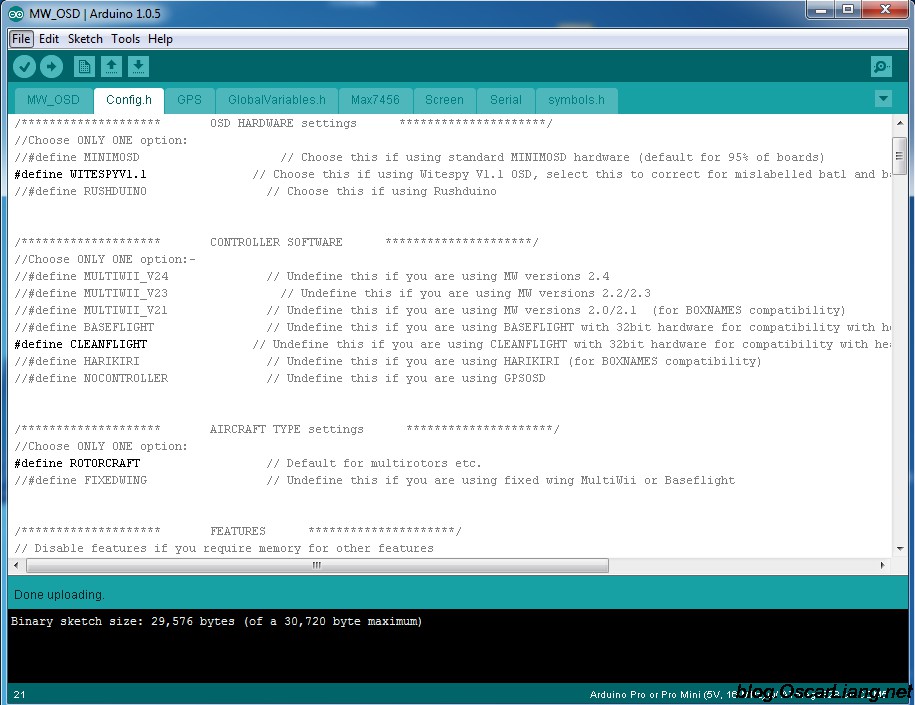
- ArduinoIDEをダウンロードする
- ArduinoIDEでファームウェアファイルを開く
- 必要に応じて設定を変更します
- ボードタイプ(WitespyV1.1)とフライトコントローラーファームウェア(Cleanflight)だけを変更しました。
- FTDIアダプター(プログラマー)をMinimOSD / MicroMinimOSDに接続します
- [コンパイルしてアップロード]をクリックします
 ArduPilotMegaのOSD-フライトビデオにテレメトリデータをオーバーレイするためのシステム
ArduPilotMegaのOSD-フライトビデオにテレメトリデータをオーバーレイするためのシステム Windows PCがWi-Fiホットスポットモードで電話に接続しないのはなぜですか?
Windows PCがWi-Fiホットスポットモードで電話に接続しないのはなぜですか? ノートパソコンの明るさを調整する際の問題の解決
ノートパソコンの明るさを調整する際の問題の解決